You might also like
- Microprocessor and MicrocontrollerDocument1 pageMicroprocessor and MicrocontrollerJitendraNo ratings yet
- Lecture9 Thirdmicroprocessorc PDFDocument14 pagesLecture9 Thirdmicroprocessorc PDFkaram hayderNo ratings yet
- 8086 FullDocument72 pages8086 FullNandhini Nachiyar100% (4)
- Microprocessor: Based, Multipurpose, ProgrammableDocument61 pagesMicroprocessor: Based, Multipurpose, ProgrammableSiddhant MittalNo ratings yet
- MODULE-2 - Pin Diagram - Part 4Document16 pagesMODULE-2 - Pin Diagram - Part 4eshwar211104No ratings yet
- 8086 DatasheetDocument30 pages8086 Datasheetshailendrasingh20% (1)
- 8088 8-Bit Hmos Microprocessor 8088/8088-2Document30 pages8088 8-Bit Hmos Microprocessor 8088/8088-2Alexandro Manuel Ku LopezNo ratings yet
- Microprocessors II: Memory and Input/Output InterfacesDocument20 pagesMicroprocessors II: Memory and Input/Output Interfacesحاتم طلال علي جردوNo ratings yet
- PROGRAMACIONDocument76 pagesPROGRAMACIONEdson HernándezNo ratings yet
- MP Lec2Document26 pagesMP Lec2Hassan AhmedNo ratings yet
- EEE342-MP-12a-8080-8088 Hardware SpecificationDocument47 pagesEEE342-MP-12a-8080-8088 Hardware SpecificationBilal KhanNo ratings yet
- Overview or Features of 8086: It Is A 16-Bit MicroprocessorDocument33 pagesOverview or Features of 8086: It Is A 16-Bit MicroprocessorSamuel KuantumNo ratings yet
- The 8088 and 8086 Microprocessors: Their Memory and Input/Output InterfacesDocument30 pagesThe 8088 and 8086 Microprocessors: Their Memory and Input/Output InterfacesNutan VarshneyNo ratings yet
- Unit 2 8086 System Bus Structures FullunitDocument36 pagesUnit 2 8086 System Bus Structures Fullunitlauro eugin brittoNo ratings yet
- Unit 3 8086 Microprocessor InterfacingDocument29 pagesUnit 3 8086 Microprocessor InterfacingDere JesusNo ratings yet
- Unit 2 NotesDocument26 pagesUnit 2 Notesabishek abiNo ratings yet
- 8086 Pin DiagramDocument9 pages8086 Pin Diagram12343567890100% (2)
- 8085 Microprocessor PPT and PDF ReportDocument7 pages8085 Microprocessor PPT and PDF Reportanita1711No ratings yet
- Chap 1 - MicDocument48 pagesChap 1 - MicSwapnaliNo ratings yet
- P3-Suryani-Arsitektur Mikroprosessor 16 BitDocument69 pagesP3-Suryani-Arsitektur Mikroprosessor 16 BitdestiaraNo ratings yet
- Ec6504 MPMC Unit 2Document194 pagesEc6504 MPMC Unit 2dkNo ratings yet
- MicroprocessorDocument79 pagesMicroprocessorvanshikalra142No ratings yet
- Microprocessor Systems and Interfacing (Eee342) : Dr. Omer Chughtai EE Dept. CUI/WahDocument38 pagesMicroprocessor Systems and Interfacing (Eee342) : Dr. Omer Chughtai EE Dept. CUI/WahAbdul RabNo ratings yet
- 8086 DetailDocument319 pages8086 Detailmalinigangadharan25No ratings yet
- Unit 2 Assembly Language Programming and Interfacing-1-130Document130 pagesUnit 2 Assembly Language Programming and Interfacing-1-130bittukamble0No ratings yet
- 8086/88 Hardware and Bus StructureDocument27 pages8086/88 Hardware and Bus StructuredilipsugadevNo ratings yet
- Advanced Microprocessors: Date: 16/11/2005 Prof. S. JagannathanDocument39 pagesAdvanced Microprocessors: Date: 16/11/2005 Prof. S. JagannathanVinoda DhayanitheNo ratings yet
- 8086 Hardware Specification: Segment 5Document19 pages8086 Hardware Specification: Segment 5Tigabu YayaNo ratings yet
- Sigals 8086Document31 pagesSigals 8086RajaRaman.GNo ratings yet
- Pin Diagram Memory Segmentation and InterfacingDocument27 pagesPin Diagram Memory Segmentation and Interfacingboss kingNo ratings yet
- Introduction To 8086Document39 pagesIntroduction To 8086Jeevanantham GovindarajNo ratings yet
- Unit II 8086 SYSTEM Bus Structure: BookDocument194 pagesUnit II 8086 SYSTEM Bus Structure: BookGomathi PsNo ratings yet
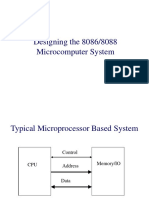
- Designing The 8086/8088 Microcomputer SystemDocument22 pagesDesigning The 8086/8088 Microcomputer SystemS RAVINo ratings yet
- Minimum and Maximum Mode of 8086 of 8086: Sutapa SarkarDocument26 pagesMinimum and Maximum Mode of 8086 of 8086: Sutapa SarkarNishal Bharadwaj NNo ratings yet
- M80C86/M80C86-2 16-Bit Chmos Microprocessor: MilitaryDocument20 pagesM80C86/M80C86-2 16-Bit Chmos Microprocessor: MilitarySebastianCanoRuizNo ratings yet
- 8086 ArchitectureDocument35 pages8086 Architecturemishamoamanuel574No ratings yet
- SIGNALS of 8086Document8 pagesSIGNALS of 8086balashankar0508No ratings yet
- Lecture 3 & 4 8086 ArchitectureDocument43 pagesLecture 3 & 4 8086 Architecturebahauddin masumNo ratings yet
- Pin Diagram of 8086 MicroprocessorDocument14 pagesPin Diagram of 8086 Microprocessorkranthi6190No ratings yet
- Unit III 8086 Microprocessor InterfacingDocument26 pagesUnit III 8086 Microprocessor InterfacingRammanohar Lokiya100% (1)
- Microprocessors and Interfaces: 2021-22 8086 Pin Diagram: by Dr. Sanjay VidhyadharanDocument12 pagesMicroprocessors and Interfaces: 2021-22 8086 Pin Diagram: by Dr. Sanjay Vidhyadharanvikas chawlaNo ratings yet
- Pinouts of 8086Document12 pagesPinouts of 8086Infinity Star GamingNo ratings yet
- Microprocessors and MicrocontrollersDocument21 pagesMicroprocessors and MicrocontrollerslaraNo ratings yet
- Microprocessor: PentiumDocument45 pagesMicroprocessor: PentiumANSHY SINGHNo ratings yet
- U3 8086 MicroprocessorDocument10 pagesU3 8086 MicroprocessorNishant Singh ChauhanNo ratings yet
- Connection-Oriented Networks: SONET/SDH, ATM, MPLS and Optical NetworksFrom EverandConnection-Oriented Networks: SONET/SDH, ATM, MPLS and Optical NetworksNo ratings yet
- StarLAN Technology ReportFrom EverandStarLAN Technology ReportRating: 3 out of 5 stars3/5 (1)
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Computer Organization and Design: The Hardware / Software InterfaceFrom EverandComputer Organization and Design: The Hardware / Software InterfaceRating: 4 out of 5 stars4/5 (12)
- EEEQ 221 Fluid Mechanics 3B - Notes For 12th January 2018Document37 pagesEEEQ 221 Fluid Mechanics 3B - Notes For 12th January 2018Ellie AwiNo ratings yet
- EEEQ 221 Fluid Mechanics 7B - Notes For 2nd February 2018Document44 pagesEEEQ 221 Fluid Mechanics 7B - Notes For 2nd February 2018Ellie AwiNo ratings yet
- EEEQ 221 Fluid Mechanics 2B - 2 Notes For 5th January 2018Document18 pagesEEEQ 221 Fluid Mechanics 2B - 2 Notes For 5th January 2018Ellie AwiNo ratings yet
- 1.2 EEEQ 472 - Architecture of The 8086 Microproessor - Register OrganizationDocument6 pages1.2 EEEQ 472 - Architecture of The 8086 Microproessor - Register OrganizationEllie AwiNo ratings yet
- 4a Interrupts of Intel 8085Document3 pages4a Interrupts of Intel 8085Ellie AwiNo ratings yet
- 4c The 8259 Programmable Interrupt ControllerDocument3 pages4c The 8259 Programmable Interrupt ControllerEllie AwiNo ratings yet
- 1.9 EEEQ 472 - Memory InterfacingDocument13 pages1.9 EEEQ 472 - Memory InterfacingEllie AwiNo ratings yet
- 1.1 EEEQ 472 - Architecture of The 8086 Microproessor - SegmentationDocument5 pages1.1 EEEQ 472 - Architecture of The 8086 Microproessor - SegmentationEllie AwiNo ratings yet
- 1.10 EEEQ 472 - Address DecodingDocument14 pages1.10 EEEQ 472 - Address DecodingEllie AwiNo ratings yet
- Countdown Timers For PowerPointDocument21 pagesCountdown Timers For PowerPointJeeyin MaryNo ratings yet
- GSM RDocument92 pagesGSM Reutopia2211No ratings yet
- Basic Electronics Lab Manual For BSCDocument15 pagesBasic Electronics Lab Manual For BSCGanesan KandasamyNo ratings yet
- HG Mini en V4Document2 pagesHG Mini en V4ViridianaNo ratings yet
- StatistikaDocument9 pagesStatistikaSteve GhanyNo ratings yet
- Readme CadenceDocument12 pagesReadme CadenceEliasA.TiongkiaoNo ratings yet
- Danielle Christina Bowker ResumeDocument2 pagesDanielle Christina Bowker Resumeapi-284266639No ratings yet
- Distribution Strategy of GP, Robi & BanglalinkDocument4 pagesDistribution Strategy of GP, Robi & BanglalinkMuhammad Saud MasrurNo ratings yet
- Putty For QNAPDocument8 pagesPutty For QNAPMohan RajNo ratings yet
- Flappy Bird Game: By: Hamza Gulistan Reg No: FA14-Bcs-027Document19 pagesFlappy Bird Game: By: Hamza Gulistan Reg No: FA14-Bcs-027MarcioRogérioNizzolaNo ratings yet
- Fc202 Danfoss Manual ProgramareDocument246 pagesFc202 Danfoss Manual ProgramareRaducan Teodor100% (1)
- Chapter 6 - Internal Tables - SAP ABAP - Hands-On Test Projects With Business ScenariosDocument44 pagesChapter 6 - Internal Tables - SAP ABAP - Hands-On Test Projects With Business Scenariosପରିଡା ରଣେଦ୍ରNo ratings yet
- Assignement X For PHD January 2020 PDFDocument4 pagesAssignement X For PHD January 2020 PDFsagarNo ratings yet
- Cayley Graphs of Groups and Their ApplicationsDocument47 pagesCayley Graphs of Groups and Their ApplicationstahirNo ratings yet
- Identifying Duplicate Copy On Other WebsitesDocument2 pagesIdentifying Duplicate Copy On Other WebsitesVino E GRGSMSNo ratings yet
- G3 PLC OverviewDocument6 pagesG3 PLC OverviewTharun ThampanNo ratings yet
- (Lazy) Deep Learning in PythonDocument284 pages(Lazy) Deep Learning in PythonStorm_RaiderNo ratings yet
- Shri Yogendra Sagar Institute of Technology and Science. RatlamDocument6 pagesShri Yogendra Sagar Institute of Technology and Science. RatlamiamsherkhanNo ratings yet
- Congestion Driven 'Placement For Standard Cell Design: 'VlsiDocument4 pagesCongestion Driven 'Placement For Standard Cell Design: 'VlsigowripNo ratings yet
- Mysql Paper 1Document2 pagesMysql Paper 1Ghanshyam SharmaNo ratings yet
- What Is SUMI?: Quality From The End User's Point of View. SUMI Has Been Developed To Provide An AuthoritativeDocument3 pagesWhat Is SUMI?: Quality From The End User's Point of View. SUMI Has Been Developed To Provide An Authoritativesus023No ratings yet
- Transistor DatasheetDocument2 pagesTransistor DatasheetWoody BilNo ratings yet
- Supply Chain of Starbucks: Group 6 Sona Pathak Meet Patel Vishal Katariya Narender Vignesh Amandeep SinghDocument9 pagesSupply Chain of Starbucks: Group 6 Sona Pathak Meet Patel Vishal Katariya Narender Vignesh Amandeep SinghnarenNo ratings yet
- AKD20503 - 3 Yaw Damper SystemDocument28 pagesAKD20503 - 3 Yaw Damper SystemAtiqah Nabilah RazaliNo ratings yet
- Biometrics 2017 HandbookDocument124 pagesBiometrics 2017 HandbookVlastimir PejićNo ratings yet
- SMK Raja Muda Musa Bestari Jaya SelangorDocument24 pagesSMK Raja Muda Musa Bestari Jaya Selangorbaie1501No ratings yet
- Winter Soldier ArmsDocument1 pageWinter Soldier ArmsBastien Guillemat Compte II100% (2)
- Rga7 TrainingDocument123 pagesRga7 TrainingamiestudentNo ratings yet
- CCNP ROUTE Chapter 7 Exam Answers (Version 7) - Score 100%Document7 pagesCCNP ROUTE Chapter 7 Exam Answers (Version 7) - Score 100%Trương Thế HiếuNo ratings yet
- Mobile Forensics Lecture SlidesDocument25 pagesMobile Forensics Lecture SlidesV Yaswanth Kumar100% (1)