You might also like
- Coordination, Not Control, Is Central To MovementDocument13 pagesCoordination, Not Control, Is Central To MovementEvan GrayNo ratings yet
- Essay - Top-Down, Bottom Up FinalDocument6 pagesEssay - Top-Down, Bottom Up FinalMarek CarnyNo ratings yet
- Movement Variability in LocomotionDocument20 pagesMovement Variability in LocomotionLaboratory in the WildNo ratings yet
- Fuchs KelsoDocument31 pagesFuchs Kelsoİpek OMURNo ratings yet
- Planificacion e Imitacion de Movimientos CorporalesDocument19 pagesPlanificacion e Imitacion de Movimientos CorporalesJc BTorresNo ratings yet
- Embodiment For BehaviorDocument28 pagesEmbodiment For BehaviorSuzana LuchesiNo ratings yet
- 10 1 1 16 1900 PDFDocument15 pages10 1 1 16 1900 PDFJisha KuruvillaNo ratings yet
- PRINCIPLES OF LEARNING MOTOR SKILLS AddDocument21 pagesPRINCIPLES OF LEARNING MOTOR SKILLS AddHerminigildo GuilaranNo ratings yet
- Dynamic Systems Theory by Bernstein, 1967Document4 pagesDynamic Systems Theory by Bernstein, 1967Alexa ValdezNo ratings yet
- Grade 10 Biomechanics FundamentalsDocument6 pagesGrade 10 Biomechanics FundamentalsaimeeNo ratings yet
- Biomechanics As A Window Into The Neural Control oDocument14 pagesBiomechanics As A Window Into The Neural Control oAgustin MontenegroNo ratings yet
- Biotensegrity and Myofascial Chains ApproachDocument23 pagesBiotensegrity and Myofascial Chains Approachjoao manoelNo ratings yet
- Applying Principles of Motor LearningDocument40 pagesApplying Principles of Motor LearningquintaquintaNo ratings yet
- Topic 3 Dynamical System TheoryDocument3 pagesTopic 3 Dynamical System TheoryRellan YbanezNo ratings yet
- Major 4 - ActivitiesDocument10 pagesMajor 4 - ActivitiesJasper Diñoso JacosalemNo ratings yet
- Why and How Are Posture and Movement Coordinated?: Progress in Brain Research February 2004Document16 pagesWhy and How Are Posture and Movement Coordinated?: Progress in Brain Research February 2004BogdanNo ratings yet
- Muscle Coordination Insights From Forward Dynamics ModelsDocument16 pagesMuscle Coordination Insights From Forward Dynamics Modelsİpek OMURNo ratings yet
- The Coordination of Movement: Optimal Feedback Control and BeyondDocument9 pagesThe Coordination of Movement: Optimal Feedback Control and BeyondHumă SebastianNo ratings yet
- Animal Movement, Mechanical Tuning and Coupled SystemsDocument7 pagesAnimal Movement, Mechanical Tuning and Coupled SystemsFadhlan MuchlasNo ratings yet
- Muscle Force Distribution For Adaptive Control of A Humanoid Robot Arm With Redundant Bi-Articular and Mono-Articular Muscle MechanismDocument11 pagesMuscle Force Distribution For Adaptive Control of A Humanoid Robot Arm With Redundant Bi-Articular and Mono-Articular Muscle MechanismpaperopenaccessNo ratings yet
- ZajacWinters MuscSkelMod 90Document29 pagesZajacWinters MuscSkelMod 90Rodrigo Ruiz CarrascoNo ratings yet
- Group Lecture Notes PMCMLDocument11 pagesGroup Lecture Notes PMCMLmary rose ombrogNo ratings yet
- An Architecture For Dual ReasoningDocument28 pagesAn Architecture For Dual ReasoningJohann Sebastian MastropianoNo ratings yet
- The Masculoskeletal System & Tissue MechanicsDocument29 pagesThe Masculoskeletal System & Tissue MechanicsEdara Rajesh KumarNo ratings yet
- Motor BehaviourDocument210 pagesMotor BehaviourDustinSapalaNo ratings yet
- Evolving Experience-Dependent Robust Behaviour in Embodied AgentsDocument12 pagesEvolving Experience-Dependent Robust Behaviour in Embodied Agentsjosef_151No ratings yet
- How To Build A Brain From Function To ImplementatiDocument19 pagesHow To Build A Brain From Function To ImplementatiadamtechleadNo ratings yet
- Duarte Applied Motor Control and Learning Exercise, Sports and DanceDocument49 pagesDuarte Applied Motor Control and Learning Exercise, Sports and DanceZedy Gulles100% (4)
- Sensosry Motion ControlDocument19 pagesSensosry Motion ControlMarcela PaviaNo ratings yet
- The Relationship Between A Child's Postural Stability and Manual DexterityDocument11 pagesThe Relationship Between A Child's Postural Stability and Manual DexterityRun CapNo ratings yet
- Templates 1999 J.exp - BioDocument8 pagesTemplates 1999 J.exp - Bioisbro1788No ratings yet
- SBMA1403Document88 pagesSBMA1403DavidConversNo ratings yet
- Department of Exercise and Sport Science Manchester Metropolitan University, UKDocument24 pagesDepartment of Exercise and Sport Science Manchester Metropolitan University, UKChristopher ChanNo ratings yet
- Automated Derivation of Movement Primitives Using PCADocument17 pagesAutomated Derivation of Movement Primitives Using PCAEscuela De ArteNo ratings yet
- Behavioural Robustness: A Link Between Distributed Mechanisms and Coupled Transient DynamicsDocument13 pagesBehavioural Robustness: A Link Between Distributed Mechanisms and Coupled Transient Dynamicsjosef_151No ratings yet
- Skill Acquisition in PE A Speculative PerspectiveDocument11 pagesSkill Acquisition in PE A Speculative PerspectiveegessatimothyNo ratings yet
- Biotensegrity and Myofascial Chains - A Global Approach To An Integrated Kinectic Chain PDFDocument7 pagesBiotensegrity and Myofascial Chains - A Global Approach To An Integrated Kinectic Chain PDFElaine CspNo ratings yet
- Multiple Muscle Systems - Biomechanics and Movement OrganizationDocument817 pagesMultiple Muscle Systems - Biomechanics and Movement OrganizationChris SakeNo ratings yet
- Moral Cognition: Group: Dilemmas Students: Alexander Rodríguez Cruz Marlon Andrés Ríos López Leandro Ezequiel CortésDocument4 pagesMoral Cognition: Group: Dilemmas Students: Alexander Rodríguez Cruz Marlon Andrés Ríos López Leandro Ezequiel CortésAlexander Rodriguez CruzNo ratings yet
- Topic 2 Cognitive Based TheoryDocument8 pagesTopic 2 Cognitive Based TheoryRellan YbanezNo ratings yet
- An Integrative Introduction To Human Augmentation ScienceDocument23 pagesAn Integrative Introduction To Human Augmentation ScienceEDITNo ratings yet
- Robotic Exoskeletons: A Perspective For The Rehabilitation of Arm Coordination in Stroke PatientsDocument13 pagesRobotic Exoskeletons: A Perspective For The Rehabilitation of Arm Coordination in Stroke PatientsLe Dinh PhongNo ratings yet
- Theory of Functional Systems and Neural NetworksDocument6 pagesTheory of Functional Systems and Neural NetworksrorozainosNo ratings yet
- Effects of Visual and Proprioceptive Motion Feedback On Human Control of Targeted MovementDocument12 pagesEffects of Visual and Proprioceptive Motion Feedback On Human Control of Targeted MovementmacNo ratings yet
- Evolutionary Psychology: A Tutorial: The Existence of Life Poses Three Major QuestionsDocument23 pagesEvolutionary Psychology: A Tutorial: The Existence of Life Poses Three Major QuestionsgopyyyyyNo ratings yet
- NIH Public Access: Author ManuscriptDocument14 pagesNIH Public Access: Author ManuscriptRozyNo ratings yet
- Event Perception: How the Human Perceptual System Parses ExperienceDocument25 pagesEvent Perception: How the Human Perceptual System Parses ExperienceJudy Costanza BeltránNo ratings yet
- Avella 2009Document17 pagesAvella 2009Juan Ignacio Guerrero HenríquezNo ratings yet
- Dynamics of Legged LocomotionDocument115 pagesDynamics of Legged Locomotionjose diazNo ratings yet
- Santello (2015) Are Movement Disorders and Sensoriomotor Injurires PathologicalDocument13 pagesSantello (2015) Are Movement Disorders and Sensoriomotor Injurires PathologicalEdgarNo ratings yet
- State Space Vectors: On Directionality Tools in Self-Organizing SystemsDocument6 pagesState Space Vectors: On Directionality Tools in Self-Organizing Systemsalaaa3No ratings yet
- Motor Control PDFDocument19 pagesMotor Control PDFsurabhi_lodha8709No ratings yet
- A Systems Approach To Health and Performance: A Brief Primer OnDocument21 pagesA Systems Approach To Health and Performance: A Brief Primer OnAlbertoNo ratings yet
- Review: Computational Mechanisms of Sensorimotor ControlDocument18 pagesReview: Computational Mechanisms of Sensorimotor Controlangelica barrazaNo ratings yet
- On Posture As A Modality For Expressing and Recognizing EmotionsDocument8 pagesOn Posture As A Modality For Expressing and Recognizing EmotionsAndra BaddNo ratings yet
- Quantifying Dynamic Stability and Maneuverability in Legged LocomotionDocument9 pagesQuantifying Dynamic Stability and Maneuverability in Legged Locomotionisbro1788No ratings yet
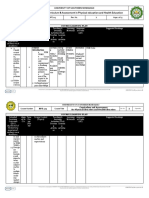
- Table of SpecificationDocument2 pagesTable of SpecificationKenneth Delegencia GallegoNo ratings yet
- Prof EdDocument2 pagesProf EdKenneth Delegencia GallegoNo ratings yet
- Research PaperDocument16 pagesResearch PaperKenneth Delegencia GallegoNo ratings yet
- Curriculum & Assessment in PEDocument22 pagesCurriculum & Assessment in PEKenneth Delegencia GallegoNo ratings yet
- QuizDocument2 pagesQuizKenneth Delegencia GallegoNo ratings yet
- 1Document2 pages1Kenneth Delegencia GallegoNo ratings yet
- QuizDocument2 pagesQuizKenneth Delegencia GallegoNo ratings yet
- Research PaperDocument21 pagesResearch PaperKenneth Delegencia GallegoNo ratings yet
- Topic 3 Chapter 2Document2 pagesTopic 3 Chapter 2Kenneth Delegencia GallegoNo ratings yet
- Three Models of Curriculum Design ExplainedDocument12 pagesThree Models of Curriculum Design ExplainedKenneth Delegencia GallegoNo ratings yet
- Topic 6 Chapter 2Document4 pagesTopic 6 Chapter 2Kenneth Delegencia GallegoNo ratings yet
- Chapter 6 Curriculum - EvaluationDocument11 pagesChapter 6 Curriculum - EvaluationKenneth Delegencia GallegoNo ratings yet
- CHAPTER 1 TOPIC 5 Reasons To Study Motor Contrl and LearningDocument3 pagesCHAPTER 1 TOPIC 5 Reasons To Study Motor Contrl and LearningKenneth Delegencia GallegoNo ratings yet
- Chapter 3 Part 1Document11 pagesChapter 3 Part 1Kenneth Delegencia GallegoNo ratings yet
- CHAPTER 1 TOPIC 3 A Brief History of Motor Control and Motor LearningDocument3 pagesCHAPTER 1 TOPIC 3 A Brief History of Motor Control and Motor LearningKenneth Delegencia GallegoNo ratings yet
- CHAPTER 1 TOPIC 2 Motor Control and Motor LearningDocument4 pagesCHAPTER 1 TOPIC 2 Motor Control and Motor LearningKenneth Delegencia GallegoNo ratings yet
- CHAPTER 1 TOPIC 1 Acquiring Knowledge Concerning Motor SkillsDocument4 pagesCHAPTER 1 TOPIC 1 Acquiring Knowledge Concerning Motor SkillsKenneth Delegencia GallegoNo ratings yet
- Assessment in Learning 1 Prof Ed 221: Jean Mondala Millare 2021Document38 pagesAssessment in Learning 1 Prof Ed 221: Jean Mondala Millare 2021Kenneth Delegencia GallegoNo ratings yet
- Chapter IDocument6 pagesChapter IAngelica LlamasNo ratings yet
- MODULE II Prof Ed 322Document13 pagesMODULE II Prof Ed 322JMJ Entertainment VinesNo ratings yet
- Authentic Assessment 1Document17 pagesAuthentic Assessment 1Kenneth Delegencia GallegoNo ratings yet
- Healthy Chicken Pasta Recipes From EatingWell MagazineDocument10 pagesHealthy Chicken Pasta Recipes From EatingWell MagazineAlice GiffordNo ratings yet
- Members From The Vietnam Food AssociationDocument19 pagesMembers From The Vietnam Food AssociationMaiquynh DoNo ratings yet
- Chapter 2 - DynamicsDocument8 pagesChapter 2 - DynamicsTHIÊN LÊ TRẦN THUẬNNo ratings yet
- Speidel, M. O. (1981) - Stress Corrosion Cracking of Stainless Steels in NaCl Solutions.Document11 pagesSpeidel, M. O. (1981) - Stress Corrosion Cracking of Stainless Steels in NaCl Solutions.oozdemirNo ratings yet
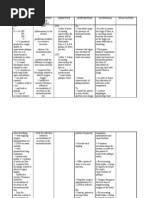
- NCP For Ineffective Airway ClearanceDocument3 pagesNCP For Ineffective Airway ClearanceJennelyn BayleNo ratings yet
- CIMA Financial Accounting Fundamentals Past PapersDocument107 pagesCIMA Financial Accounting Fundamentals Past PapersAnonymous pwAkPZNo ratings yet
- Antianginal Student222Document69 pagesAntianginal Student222MoonAIRNo ratings yet
- Statistical PhysicsDocument4 pagesStatistical PhysicsRenan ZortéaNo ratings yet
- Thời gian làm bài: 90 phút (không kể thời gian giao đề)Document8 pagesThời gian làm bài: 90 phút (không kể thời gian giao đề)Nguyễn KiênNo ratings yet
- Value-Added ProductsDocument7 pagesValue-Added ProductsTendai MutisiNo ratings yet
- Newsletter 9th October PDFDocument6 pagesNewsletter 9th October PDFcaseliseNo ratings yet
- 2009 Bar Exam Criminal Law QuestionsDocument25 pages2009 Bar Exam Criminal Law QuestionsJonny Duppses100% (2)
- Songs Masters Campfire SongbookDocument50 pagesSongs Masters Campfire SongbookGuillaume Metz86% (7)
- German Modern Architecture Adn The Modern WomanDocument24 pagesGerman Modern Architecture Adn The Modern WomanUrsula ColemanNo ratings yet
- Linear Programming Evaluation of Feeds pH and AcidityDocument5 pagesLinear Programming Evaluation of Feeds pH and AcidityAugust Ridlof RiwuNo ratings yet
- Indigenous Religious Beliefs Cosmology FilipinoDocument7 pagesIndigenous Religious Beliefs Cosmology FilipinoRegz GasparNo ratings yet
- Encounters 3Document4 pagesEncounters 3lgwqmsiaNo ratings yet
- Finaflex Main Catalog 2022Document50 pagesFinaflex Main Catalog 2022Benlee Calderón LimaNo ratings yet
- CatalogueDocument36 pagesCataloguehgwlin100% (1)
- The LOMA Weekly Herald Volume 1 Issue 6Document6 pagesThe LOMA Weekly Herald Volume 1 Issue 6LOMA MaksNo ratings yet
- TELENGANA BUSINESS DIRECTORY PENEL D-PanelDocument65 pagesTELENGANA BUSINESS DIRECTORY PENEL D-Panelamandeep100% (4)
- An Umbrella For Druvi: Author: Shabnam Minwalla Illustrator: Malvika TewariDocument12 pagesAn Umbrella For Druvi: Author: Shabnam Minwalla Illustrator: Malvika TewariKiran Kumar AkulaNo ratings yet
- Post Graduate Dip DermatologyDocument2 pagesPost Graduate Dip DermatologyNooh DinNo ratings yet
- JPT Jan 2013Document119 pagesJPT Jan 2013Maryam IslamNo ratings yet
- 333 Sapugay v. CADocument3 pages333 Sapugay v. CAJoshua Ejeil PascualNo ratings yet
- Ship Constructor Structure TutorialDocument237 pagesShip Constructor Structure TutorialRodrigo Horta100% (1)
- 2023 SPMS Indicators As of MarchDocument22 pages2023 SPMS Indicators As of Marchcds documentNo ratings yet
- Marantz sr4200 Service PDFDocument29 pagesMarantz sr4200 Service PDFAnonymous KSedwANo ratings yet
- Improving Oil Recovery with EOR/IOR MethodsDocument1 pageImproving Oil Recovery with EOR/IOR MethodsMuhammad Fawwad ObaidaNo ratings yet
- EGNTDocument6 pagesEGNTTida Nicholas NyahunzviNo ratings yet