You might also like
- Unit 3 Combinatorics MCQDocument57 pagesUnit 3 Combinatorics MCQFatherNo ratings yet
- Chapter 1 Signal and SystemsDocument30 pagesChapter 1 Signal and SystemsJex DeyNo ratings yet
- Lecture 1Document20 pagesLecture 1tejasNo ratings yet
- Differential Equations1Document18 pagesDifferential Equations1Gladys KahindiNo ratings yet
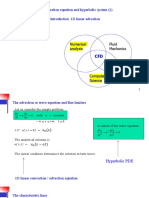
- The Advection Equation and Hyperbolic System (1) Introduction: 1D Linear AdvectionDocument17 pagesThe Advection Equation and Hyperbolic System (1) Introduction: 1D Linear Advection刘伟轩No ratings yet
- MSTE 1 Nov 2023 Ref - SOLUTION - DONEDocument2 pagesMSTE 1 Nov 2023 Ref - SOLUTION - DONEengr.jaysoncapadosamariNo ratings yet
- Lesson 1Document33 pagesLesson 1Matt GeoligaoNo ratings yet
- APPLICATION OF LaplaceDocument8 pagesAPPLICATION OF LaplaceHatsuieeNo ratings yet
- Phys42200 Lecture20Document26 pagesPhys42200 Lecture20jonny.platters34No ratings yet
- The AKLT Model: Motivation, Model and GroundstateDocument2 pagesThe AKLT Model: Motivation, Model and GroundstateAlex BolsNo ratings yet
- Solutions 2Document4 pagesSolutions 2Araz CabbarlıNo ratings yet
- Quiz 3 Solution (No 1-4)Document3 pagesQuiz 3 Solution (No 1-4)irhamNo ratings yet
- 108S1 2007 Exam SolutionsDocument13 pages108S1 2007 Exam SolutionsAlex Telfar100% (1)
- 2.2. The Limit of A FunctionDocument1 page2.2. The Limit of A FunctionAhmed SalemNo ratings yet
- Mathematical PhysicsDocument14 pagesMathematical Physicsosama hasanNo ratings yet
- Materi Statistik 2Document27 pagesMateri Statistik 2ERISTRA NUNGSATRIA TRESNA ERNAWANNo ratings yet
- Lecture2 AnnotatedDocument28 pagesLecture2 AnnotatedJoseph AndrewesNo ratings yet
- 5.62 Physical Chemistry Ii: Mit OpencoursewareDocument7 pages5.62 Physical Chemistry Ii: Mit OpencoursewareDiana UrizaNo ratings yet
- 21 Continuous-Time Second-Order Systems: Solutions To Recommended ProblemsDocument15 pages21 Continuous-Time Second-Order Systems: Solutions To Recommended ProblemsHaren ShylakNo ratings yet
- Advanced Engineering Mathematics (Prelim Period) : Module inDocument13 pagesAdvanced Engineering Mathematics (Prelim Period) : Module inHatsuieeNo ratings yet
- نسخة Chapter 5 Differential EquationsDocument24 pagesنسخة Chapter 5 Differential Equationsمحمد عبد الرحمنNo ratings yet
- 221B Lecture Notes: Notes On Spherical Bessel Functions 1 DefinitionsDocument11 pages221B Lecture Notes: Notes On Spherical Bessel Functions 1 DefinitionsNitish KumarNo ratings yet
- MAT Lecture5Document47 pagesMAT Lecture5Deniz Egemen YılmazNo ratings yet
- Infinite Square WellDocument8 pagesInfinite Square WellLauren StevensonNo ratings yet
- Lecture 17 - Representation Theory of Lie Groups and Lie Algebras (Schuller's Geometric Anatomy of Theoretical Physics)Document12 pagesLecture 17 - Representation Theory of Lie Groups and Lie Algebras (Schuller's Geometric Anatomy of Theoretical Physics)Simon ReaNo ratings yet
- 1 15 PDFDocument7 pages1 15 PDFEddieNo ratings yet
- Cal Exam - Apr 2022 FUV - SolnsDocument3 pagesCal Exam - Apr 2022 FUV - SolnsNuong PhanNo ratings yet
- تمارين الاشتقاق اولى باك النموذج 1 1Document7 pagesتمارين الاشتقاق اولى باك النموذج 1 1kunmickey433No ratings yet
- x + 2β ˙x + ω x = 0 A β − ω t − β − ω t x + 2β ˙x + ω x=AcosωtDocument11 pagesx + 2β ˙x + ω x = 0 A β − ω t − β − ω t x + 2β ˙x + ω x=AcosωtStephany SamoNo ratings yet
- Boyce ODEch 6 S 4 P 04Document3 pagesBoyce ODEch 6 S 4 P 04Feby ArdhaniNo ratings yet
- Lecture 5Document5 pagesLecture 5ngobuzejohnNo ratings yet
- EE232 4 Density of States QW QWireDocument11 pagesEE232 4 Density of States QW QWiresyoonhanNo ratings yet
- The Solution of Simultaneous Differential Equations Using Laplace TransformsDocument6 pagesThe Solution of Simultaneous Differential Equations Using Laplace TransformsChainarong TaepanichNo ratings yet
- 1st Midterm Exam Phys 404 - Fall 2019 Solutions 0Document4 pages1st Midterm Exam Phys 404 - Fall 2019 Solutions 0محمدNo ratings yet
- Cbse cl12 Ead Mathematics Answers To Paper 13Document13 pagesCbse cl12 Ead Mathematics Answers To Paper 13priya GautamNo ratings yet
- Lect 6 PDFDocument26 pagesLect 6 PDFhabtemariam mollaNo ratings yet
- مدمجDocument22 pagesمدمجdiaanaje18333No ratings yet
- Calculating Limits: ProofDocument9 pagesCalculating Limits: ProofKetaks MooNo ratings yet
- SMTP 7 v2Document13 pagesSMTP 7 v2Roy VeseyNo ratings yet
- Lesson 3 Limits Algebraic Part 2 2022Document23 pagesLesson 3 Limits Algebraic Part 2 2022Nathaniel Louis P. MACAHILIGNo ratings yet
- Anten Final Yanıtlar RemovedDocument5 pagesAnten Final Yanıtlar RemovedAdnanNo ratings yet
- Homework 8 Solutions: 1. A Barrier in A WellDocument4 pagesHomework 8 Solutions: 1. A Barrier in A WellAzina KhanNo ratings yet
- Linear Algebra Unit 2Document61 pagesLinear Algebra Unit 2Scout opNo ratings yet
- The Calculation of Some Function LimitsDocument5 pagesThe Calculation of Some Function LimitsSebastian De BortoliNo ratings yet
- MITRES 18 001 Guide4 PDFDocument11 pagesMITRES 18 001 Guide4 PDFManoj NanduriNo ratings yet
- Mathematics of General RelativityDocument9 pagesMathematics of General Relativityosama hasanNo ratings yet
- MATH2018 - 2019 Exam T1 2020 SolutionsDocument10 pagesMATH2018 - 2019 Exam T1 2020 SolutionsNorris wongNo ratings yet
- LTI System Analysis With The Laplace TransformDocument25 pagesLTI System Analysis With The Laplace TransformMuhammad Yani MunandarNo ratings yet
- Sol 2Document7 pagesSol 2wem qiaoNo ratings yet
- MATH 20063wk5Document18 pagesMATH 20063wk5Reyziel BarganNo ratings yet
- MATH 20063wk9Document12 pagesMATH 20063wk9Reyziel BarganNo ratings yet
- Solutions To Jee - 2008 Papers Paper I (Code 3) MathsDocument27 pagesSolutions To Jee - 2008 Papers Paper I (Code 3) MathsPrasheel SharmaNo ratings yet
- Laplace PDFDocument4 pagesLaplace PDFDynaNo ratings yet
- Transfer Functions and Frequency Response: Review Questions!Document47 pagesTransfer Functions and Frequency Response: Review Questions!Pavan Singh TomarNo ratings yet
- 2017 H2 Maths Prelim SA2 Jurong Junior CollegeDocument42 pages2017 H2 Maths Prelim SA2 Jurong Junior CollegeKaren TanNo ratings yet
- Panaitopol - Formula For PiDocument2 pagesPanaitopol - Formula For Piinsomniac392No ratings yet
- Honsanalworkshop5sols CMPLT PDFDocument5 pagesHonsanalworkshop5sols CMPLT PDFSomeoneNo ratings yet
- Sol 3Document8 pagesSol 3wem qiaoNo ratings yet
- L1 LimitsDocument50 pagesL1 LimitssanguanmaraNo ratings yet
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYFrom EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Position Paper On Child PovertyDocument10 pagesPosition Paper On Child PovertyJr YansonNo ratings yet
- Final Research Paper Manuscript 1Document62 pagesFinal Research Paper Manuscript 1Jr YansonNo ratings yet
- Narrative Report 06-15-2022Document3 pagesNarrative Report 06-15-2022Jr YansonNo ratings yet
- DRRR ReviewerDocument4 pagesDRRR ReviewerJr YansonNo ratings yet
- Mod 9 - Gravity and Periodic MotionDocument40 pagesMod 9 - Gravity and Periodic MotionJr YansonNo ratings yet
- 09 Worksheet 1Document1 page09 Worksheet 1Jr YansonNo ratings yet
- 11 Worksheet 1 (3) - YANSONDocument4 pages11 Worksheet 1 (3) - YANSONJr YansonNo ratings yet
- 12 Handout 1Document13 pages12 Handout 1Jr YansonNo ratings yet
- The Negative Impact of Social Media On People's Lives: Huizhong PangDocument4 pagesThe Negative Impact of Social Media On People's Lives: Huizhong PangJr YansonNo ratings yet
- Anesthesiologist Cover Letter SampleDocument1 pageAnesthesiologist Cover Letter SampleJr YansonNo ratings yet
- 08 Quiz 1Document4 pages08 Quiz 1Jr YansonNo ratings yet
- 09 Quiz 1Document2 pages09 Quiz 1Jr YansonNo ratings yet
- 10 17275-Per 20 34 7 3-1193431Document22 pages10 17275-Per 20 34 7 3-1193431Jr YansonNo ratings yet
- The Correlation Between The Size of Clothing and The Height (1-38)Document3 pagesThe Correlation Between The Size of Clothing and The Height (1-38)Jr YansonNo ratings yet
- 09 Worksheet 1Document1 page09 Worksheet 1Jr YansonNo ratings yet
- High School Story of My Life Essay PDFDocument2 pagesHigh School Story of My Life Essay PDFJr YansonNo ratings yet
- 07 Handout 1Document6 pages07 Handout 1Jr YansonNo ratings yet
- Research About The ExecutionDocument1 pageResearch About The ExecutionJr YansonNo ratings yet
- 07 Activity 1 (5) JR YansonDocument2 pages07 Activity 1 (5) JR YansonJr YansonNo ratings yet
- MagazineDocument2 pagesMagazineJr YansonNo ratings yet
- Kompan Ils Performance TaskDocument1 pageKompan Ils Performance TaskJr YansonNo ratings yet
- ScriptDocument1 pageScriptJr YansonNo ratings yet
- 09 Quiz 1Document2 pages09 Quiz 1Jr YansonNo ratings yet
- Qualitative ResearchDocument3 pagesQualitative ResearchJr YansonNo ratings yet
- Ordinary Differential EquationsDocument33 pagesOrdinary Differential EquationsTendaiNo ratings yet
- Notes 6 6382 Branch CutsDocument42 pagesNotes 6 6382 Branch CutsManish RajNo ratings yet
- Born: Died:: 26 April 1920 in Kumbakonam, Tamil Nadu State, IndiaDocument7 pagesBorn: Died:: 26 April 1920 in Kumbakonam, Tamil Nadu State, IndiaAtul Singh ChauhanNo ratings yet
- Ai Regents at Random WorksheetsDocument242 pagesAi Regents at Random WorksheetsSmita NagNo ratings yet
- Exampro Methods SolutionsDocument536 pagesExampro Methods SolutionsHelloNo ratings yet
- Envision Lesson 7.4 Subtract Fractions With Unlike DenominatorsDocument3 pagesEnvision Lesson 7.4 Subtract Fractions With Unlike DenominatorsMohamed A MoneimNo ratings yet
- Algebra IntegralDocument123 pagesAlgebra IntegralDomingo Zapana DiazNo ratings yet
- Sol 11Document3 pagesSol 11Zahra KhanNo ratings yet
- E3Qtri XDocument12 pagesE3Qtri XRevelationNo ratings yet
- Complex Analysis Theorem Cheat SheetDocument2 pagesComplex Analysis Theorem Cheat SheetOmer Shapira100% (1)
- L#1 BM (Rational and Irrational Numbers and Their Properties)Document27 pagesL#1 BM (Rational and Irrational Numbers and Their Properties)Sarah AndersonNo ratings yet
- 1.0 Basic Algebra 1.1 Understand Basic AlgebraDocument10 pages1.0 Basic Algebra 1.1 Understand Basic AlgebraZjian WaiNo ratings yet
- 12th Maths Chapter 1 Question Paper JPRABU MATHSDocument2 pages12th Maths Chapter 1 Question Paper JPRABU MATHSVIJAYA SURYANNo ratings yet
- KLDocument5 pagesKLYogi BadkeNo ratings yet
- Introduction To Combinatorial Matrix TheoryDocument69 pagesIntroduction To Combinatorial Matrix TheoryvalstavNo ratings yet
- Ztransform AppDocument5 pagesZtransform AppSyed Ali RazaNo ratings yet
- Download pdf A Modern Introduction To Differential Equations 3Rd Edition Henry J Ricardo ebook full chapterDocument53 pagesDownload pdf A Modern Introduction To Differential Equations 3Rd Edition Henry J Ricardo ebook full chapterkrystal.marshall229100% (5)
- M3-WME03 01 Rms 20180815Document18 pagesM3-WME03 01 Rms 20180815Xavier JiangNo ratings yet
- 4.5 Autoregressive Processes AR (P) : Definition 4.7. AnDocument2 pages4.5 Autoregressive Processes AR (P) : Definition 4.7. AnharryNo ratings yet
- Muller Method: Where Z - 2c B B - 4acDocument3 pagesMuller Method: Where Z - 2c B B - 4acKantharaj Chinnappa0% (1)
- Abel's Theorem: A. Eremenko October 24, 2020Document4 pagesAbel's Theorem: A. Eremenko October 24, 2020Quang Nguyễn MinhNo ratings yet
- Winitzki - Approximation To Error FunctionDocument3 pagesWinitzki - Approximation To Error Functionwinitzki100% (1)
- The Baum-Connes Conjecture For Hyperbolic GroupsDocument26 pagesThe Baum-Connes Conjecture For Hyperbolic GroupsZRichard61No ratings yet
- FEM SalihDocument81 pagesFEM SalihSiri GundapuneediNo ratings yet
- GP ActionDocument24 pagesGP ActionTendai M Mudziiri ShumbaNo ratings yet
- CBR Calculus DiferentialDocument15 pagesCBR Calculus DiferentialRisma WatiNo ratings yet
- Recurrence RelationsDocument59 pagesRecurrence RelationsSamikshaNo ratings yet
- Theory of Equation and SymmetriesDocument117 pagesTheory of Equation and SymmetriesSSANo ratings yet