Professional Documents
Culture Documents
Mašinsko Učenje Veštačke Neuronske Mreže Sa Radijalnim Aktivacionim Funkcijama Gausovog Tipa Na Bazi Kalmanovog Filtra - Teorijske Osnove
Uploaded by
Branko NikolicOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Mašinsko Učenje Veštačke Neuronske Mreže Sa Radijalnim Aktivacionim Funkcijama Gausovog Tipa Na Bazi Kalmanovog Filtra - Teorijske Osnove
Uploaded by
Branko NikolicCopyright:
Available Formats
N. VUKOVIĆ i dr. MAŠINSKO UČENJE VEŠTAČKE NEURONSKE MREŽE SA RADIJALNIM...
Mašinsko učenje veštačke neuronske mreže sa radijalnim aktivacionim
funkcijama Gausovog tipa na bazi Kalmanovog filtra – teorijske osnove
NAJDAN L. VUKOVIĆ, Univerzitet u Beogradu, Originalni naučni rad
Inovacioni centar Mašinskog fakulteta, Beograd UDC: 004.85:004.032.26]:681.5.015.44
ZORAN Đ. MILJKOVIĆ, Univerzitet u Beogradu,
Mašinski fakultet, Beograd
U ovom radu se analizira problem mašinskog učenja veštačke neuronske mreže sa radijalnim akti-
vacionim funkcijama Gausovog tipa na bazi Kalmanovog filtra. Prikazana su tri nova sekvencijalna
algoritma mašinskog učenja: prvi algoritam direktno primenjuje linearizovani Kalmanov filtar kao
algoritam mašinskog učenja, drugi algoritam primenjuje dual Kalmanovom filtru pod nazivom line-
arizovani informacioni filtar, dok treći algoritam na poseban način aproksimira prvi i drugi moment
Gausove raspodele. U radu se naglašavaju osnovne prednosti koje pomenuti algoritmi imaju u po-
ređenju sa konvencionalnim vidovima mašinskog učenja. Za sva tri algoritma razvijen je odgovarajući
matematički model veštačke neuronske mreže sa radijalnim aktivacionim funkcijama Gausovog tipa.
Analizirane su osnovne postavke izvedenih algoritama u cilju njihove primene na složene probleme u
inženjerskoj praksi.
Ključne reči: mašinsko učenje, veštačke neuronske mreže, Kalmanov filtar
1. UVOD optimizacija parametara veštačke neuronske mre-
Veštačke neuronske mreže predstavljaju mate- že-mašinsko učenje;
matičko-softverski alat namenjen za modeliranje validacija kvaliteta obučenosti mreža;
problema koje je teško ili nemoguće definisati testiranje „performansi” dobijenih modela.
matematički. Veštačke neuronske mreže su tokom Korak broj 1 potpuno je definisan polaznim pro-
niza godina razvoja uspešno primenjene na različite blemom. Poznavanje fizičkih osnova izučavanog pro-
probleme iz inženjerske prakse [1], [2], [3], [4]. blema predstavlja osnovu za primenu veštačkih neu-
Prednosti razvoja modela problema primenom ronskih mreža. Na ovaj način se koraci br. 2, i br. 3
veštačkih neuronskih mreža ogledaju se u mogućnosti jednostavno sprovode poznavanjem fizičkog uticaja
modeliranja kompleksnih problema bez potrebe za jednih veličina na druge. U koraku br. 4 se vrši
poznavanjem eksplicitnog matematičkog modela. skaliranje eksperimentalnih podataka koje za cilj ima
Razvoj modela problema primenom veštačkih preslikavanje polaznog eksperimentalnog skupa u
neuronskih mreža podrazumeva sledeće korake: neki od uobičajenih opsega promene. Nakon pretpro-
definisanje ulaznih i izlaznih veličina; cesiranja eksperimentalnih podataka potrebno je iza-
izbor sistema za generisanje potrebnih podataka; brati tip veštačke neuronske mreže, tip aktivacione
akvizicija eksperimentalnih podataka; funkcije i broj neurona, kao i broj slojeva ako je u
pretprocesiranje eksperimentalnih podataka; pitanju višeslojna mreža [1], [4]. Navedeni parametri
direktno utiču na performanse i kvalitet predikcije. U
izbor veštačke neuronske mreže, arhitekture i tipa
koracima broj 6 i broj 7 treba definisati vid mašin-
aktivacionih funkcija;
skog učenja koji direktno zavisi od polaznog pro-
izbor tipa mašinskog učenja (nadgledano ili ne- blema, kao i algoritam učenja. Od sedmog koraka
nadgledano) i odgovarajućeg algoritma učenja; započinje iterativni postupak koji se sastoji od
__________________ optimizacije parametara i provere „naučenog” (koraci
Adresa autora: Najdan Vuković, Univerzitet u Beogradu, broj 8 i broj 9). U ovom radu analizirana je primena
Inovacioni centar Mašinskog fakulteta, Beograd, Kraljice
tri algoritma u cilju optimizacije parametara veštačke
Marije 16
Rad primljen: 07.05.2014.
neuronske mreže sa radijalnim aktivacionim funkcija-
Rad prihvaćen: 12.06.2014. ma Gausovog tipa.
TEHNIKA – MAŠINSTVO 63 (2014) 4 613
N. VUKOVIĆ i dr. MAŠINSKO UČENJE VEŠTAČKE NEURONSKE MREŽE SA RADIJALNIM...
2. VEŠTAČKA NEURONSKA MREŽA SA tematičke formulacije aktivacionih funkcija, kao i na
RADIJALNIM AKTIVACIONIM FUNKCIJAMA osnovu njihovog grafičkog prikaza, može se zaključiti
GAUSOVOG TIPA da odziv neurona na ulazni vektor x i nx direktno
Veštačka neuronska mreža sa radijalnim aktiva- zavisi od razlike ξ ij između ulaznog vektora
cionim funkcijama predstavljena je sledećim izrazom n
[1], [2], [5]: x i i vektora prototipa μ j x .
nx
N
y i w ij f xi , μ j , j
j 1
(1)
Osnovni parametri su:
vektor težinskih parametara veštačke neuronske
mreže w ij ;
vektor prototipova (repera) μ j nx , gde n x
označava broj dimenzija ulaznog vektora;
radijalne distance j ; j 1 ;
f , , je aktivaciona funkcija veštačke
neuronske mreže,
n
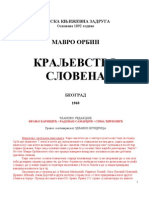
x i nx i y i y su ulazni i izlazni vektor (res- Slika 1 - Tipovi aktivacionih funkcija: a) Gausova
pektivno) koji formiraju skup za optimizaciju. aktivaciona funkcija; b) Inverzna kvadratna
Postoji više mogućnosti izbora aktivacione funk- aktivaciona funkcija; c) Kvadratna aktiva-
cije, a sam izbor zavisi od problema za koji se razvija ciona funkcija; d) Logaritamska
ovaj tip veštačke neuronske mreže. Mogući tipovi U slučaju Gausove i inverzne kvadratne akti-
aktivacionih funkcija su: vacione funkcije, aktivacija neurona je veća ukoliko
Gausova aktivaciona funkcija: je ξ ij opada. U slučaju kvadratne aktivacione funk-
1 cije i logaritamske aktivacione funkcije aktivacija ne-
f xi exp 2 ξ Tij ξ ij urona se povećava sa porastom ξ ij . Moguće je uočiti
2
j (2) i da je izlazna vrednost aktivacione funkcije (aktiva-
Inverzna kvadratna aktivaciona funkcija: cija neurona) uvek pozitivna veličina
f x i ξ Tij ξ ij 2j
1 2 f xi 0, xi nx
.
(3)
U ovom istraživanju izabrana je veštačka neuro-
Kvadratna aktivaciona funkcija: nska mreža sa radijalnim aktivacionim funkcijama u
vidu aktivacionih funkcija Gausovog tipa. Osnovni
f x i ξ Tij ξ ij 2j
12
(4) razlog za izbor Gausove aktivacione funkcije je pre
svega u postavci, koja obezbeđuje veću aktivaciju
Logaritamska aktivaciona funkcija:
neurona ukoliko ξ ij opada i manju aktivaciju ukoliko
f xi ξTij ξ ij ln ξ ij ξ ij raste. Potrebno je naglasiti i osnovnu razliku re-
(5)
prezentacije skupa podataka modeliranjem primenom
gde je ξ ij xi μ j ; ξ ij nx razlika između i -tog višeslojne perceptron veštačke neuronske meže i ve-
ulaznog vektora xi i j -tog prototip vektora μ j . Pa- štačke neuronske mreže sa radijalnim aktivacionim
funkcijama. Naime, višeslojni perceptron uspostavlja
rametar j određuje širinu aktivacione funkcije, od- klasifikacionu granicu između odgovarajućih eleme-
nosno graničnu vrednost pripadnosti i -tog ulaznog nata skupa, dok radijalne aktivacione funkcije uspo-
vektora xi skupu čiji je predstavnik j -ti prototip ve- stavljaju sličnost između elemenata ulaznog skupa
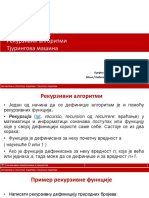
podataka [1]. U tom smislu, na slici 2 je dat prikaz
ktor μ j . Na slici 1 su grafički prikazane četiri karak- Gausove aktivacione funkcije za različite vrednosti
teristične aktivacione funkcije f xi . Na osnovu ma- radijalne distance i
614 TEHNIKA – MAŠINSTVO 63 (2014) 4
N. VUKOVIĆ i dr. MAŠINSKO UČENJE VEŠTAČKE NEURONSKE MREŽE SA RADIJALNIM...
Linearizovani Kalmanov filtar (LKF);
Linearizovani informacioni filtar (LIF);
Algoritam specifične aproksimacije momenata
(ASAM).
Primena LKF algoritma za potrebe optimizacije
odgovarajućih parametara veštačke neuronske mreže
je sprovedena u [10] i predstavlja (skoro) „standar-
dni” postupak. Međutim, osnovna razlika pomenutih
rezultata u odnosu na algoritam prikazan u ovom radu
ogleda se u sekvencijalnoj obradi podataka koji je pri-
menjen u ovom radu (on line režim), kao i različitom
tipu aktivacionih funkcija. Po saznanjima autora, pri-
mena linearizovanog informacionog filtra za ove po-
trebe nije uobičajeni postupak i pretraživanjem refe-
Slika 2 - Gausova aktivaciona funkcija za različite rentnih izvora nisu pronađeni odgovarajući rezultati.
Algoritam specifične aproksimacije momenata prime-
vrednosti parametra i : a) i 0,1 ; b) njen je u nekoliko referentnih izvora u cilju optimi-
i 1 ; c) i 5 ; d) i 10 . Sa porastom zacije odgovarajućih parametara, međutim s obzirom
i povećava se opseg aktivacione funkcije. na to da ASAM predstavlja relativno nov koncept u
teoriji ocenjivanja (potpuno zaokružen na teoretskom
nivou početkom 2000. godine) njegova primena za
3. OPTIMIZACIJA PARAMETARA VEŠTAČKE
različite inženjerske probleme nije dovoljno analizi-
NEURONSKE MREŽE SA RADIJALNIM rana i istražena. Prethodna činjenica predstavlja osno-
AKTIVACIONIM FUNKCIJAMA GAUSOVOG vnu ideju zbog koje je izabran razvoj algoritma obu-
TIPA – MAŠINSKO UČENJE
čavanja na bazi specifične aproksimacije momenata.
Osnovna prednost veštačke neuronske mreže sa Pre nego što uvedemo izabrane algoritme neop-
radijalnim aktivacionim funkcijama je u mogućnosti hodno je formirati vektor stanja s obzirom na to da
razdvajanja optimizacije parametara aktivacionih fun- sva tri algoritma počivaju na ovakvoj formulaciji. Na
kcija i težinskih parametara same veštačke neuronske osnovu jednačine (1) veštačka neuronska mreža sa ra-
mreže. Npr. moguće je primeniti nenadgledani vid dijalnim aktivacinim funkcijama je data kao:
mašinskog učenja [6], [7] za optimizaciju centara i w10 w11 w1J 1
radijalnih distanci na osnovu isključivo ulaznih po- w
w21 w2 J f1 (xi , 1 , 1 )
dataka x i nx iz celokupnog skupa za optimizaciju. yi
20
Nakon ovog postupka, primenjuje se nadgledani vid
mašinskog učenja u kome se uzimaju u obzir i ulazni wi 0 wi1 wij f Ј (xi , J , J )
(6)
i izlazni parovi iz skupa za optimizaciju. Proces
optimizacije centara i radijalnih distanci aktivacionih odnosno, zapisano u matričnom obliku
funkcija se može nastaviti i u drugom koraku ali ih y i Wi j G J 1
možemo i smatrati za konstantne parametre. Primeri (7)
ovakvog kombinovanog mašinskog učenja se mogu gde Wi j predstavlja matricu svih težinskih para-
videti u [7], [8]. Optimizacija parametara veštačke ne-
uronske mreže može biti sprovedena primenom me- metara, a G J 1 vektor aktivacije koga čine sve akti-
tode najmanjeg gradijenta [9], [10], ili rekurzivne vacione funkcije. Vektor stanja sistema čine svi para-
metode najmanjih kvadrata [4]. Moguće je sprovesti i metri veštačke neuronske mreže koje je potrebno op-
optimizaciju parametara i simultano menjati broj neu- timizovati u odnosu na zadati kriterijum. Znajući da
rona uzimajući u obzir grešku učenja [2], [11], [12], je svaka vrsta matrice težinskih parametara Wi j po-
[13]. Primena ovog pristupa rezultira bržom optimi-
zacijom i za rezultat ima optimalne arhitekture u po- seban vektor, polazna matrica se može napisati i u
gledu broja neurona, sa poboljšanom tačnošću i pre- sledećem obliku:
ciznošću [2], [11]. w10 w11 w1J w1T
U ovom radu su razvijena tri sekvencijalna algo- w w21 w2 J w T2
Wij
20
ritma nadgledanog tipa mašinskog učenja. Za potrebe
optimizacije parametara veštačke neuronske mreže
analizirani su sledeći algoritmi: wi 0 wi1 wij w Ti
(8)
TEHNIKA – MAŠINSTVO 63 (2014) 4 615
N. VUKOVIĆ i dr. MAŠINSKO UČENJE VEŠTAČKE NEURONSKE MREŽE SA RADIJALNIM...
Da bi se formirao vektor stanja neophodno je na-
E λ 0|0 λˆ 0|0 λ 0|0 λˆ 0|0 P
T
E λ 0|0 λˆ 0|0 ;
pisati težinske parametre u vektorskom obliku: 0|0
T E ε k 0 ; E ε k εTk 1 Q k ,k 1
w w1T w T2 w Ti
(9) E ω k 0 ; E ω k ωTk 1 R k ,k 1
Preostali elementi vektora stanja čine prototip
gde je k , k 1 Kronekerov delta simbol. U nastavku su
vektori μ J i sve radijalne distance J koje određuju
detaljno predstavljeni razvijeni sekvencijalni
pripadnost j -tom prototip vektoru, odnosno: algoritmi mašinskog učenja bazirani na Kalmanovom
T filtru.
t μ1T μ T2 μ TJ 1T 2T JT (10)
3.1 Mašinsko učenje primenom linearizovanog
Dakle, vektor stanja čine svi težinski parametri Kalmanovog filtra
veštačke neuronske mreže Wi j i parametri svih Algoritam optimizacije parametara na bazi LKF
aktivacionih funkcija t algoritma prikazan je u Algoritmu 1.
T Algoritam 1 - Pseudokod linearizovanog Kalma-
λ wT tT
(11) novog filtra za optimizaciju parametara veštačke neu-
w1T wT2 ... wTi μ1T μT2 ...μTJ 1T 2T ... JT
T
ronske mreže sa radijalnim aktivacionim funkcijama
Gausovog tipa.
Ukupan broj parametara N p veštačke neuronske 1. Algoritam LKF_RGAF (λˆ k 1| k 1 , Pk 1| k 1 , x k , y k )
mreže, a time i broj dimenzija vektora stanja sistema
E λ 0|0 λˆ 0|0 λ 0|0 λˆ 0|0 P
T
2.E λ 0|0 λˆ 0|0 ;
λ je: 0|0
3.Q diag dim λ ; R diag dim y k
N p dim λ 4. while Er Ermin
nneurona (dim(x) dim(y ) 1) 5. λˆ λˆ
(12) k | k 1 k 1| k 1
6. Pk | k 1 P k 1| k 1 Q
Funkcija dim() određuje broj dimenzija odgova-
rajućeg argumenta, x i y predstavljaju ulazni i iz-
7.
yˆ k g λˆ k | k 1 , x k
8. H k λ yˆ w g (, ) μ g (, ) g(, )
i
lazni vektor veštačke neuronske mreže respektivno, a k
nneurona je ukupan broj neurona. 9. K k Pk | k 1HTk (H k Pk | k 1H Tk R ) 1
10. λˆ k | k λˆ k | k 1 K k (y k yˆ k )
Nakon definisanja vektora stanja sistema moguće
je nastaviti uvođenje linearizovanog Kalmanovog 11. Pk | k (I K k H k )Pk | k 1
filtra, linearizovanog informacionog filtra i algoritma 1
y g λˆ
T
12. Er y g λˆ k | k , x ,x
specifične aproksimacije momenata, kao izabranih
k |k
2
algoritama za sekvencijalnu optimizaciju parametara 13. endwhile
veštačke neuronske mreže sa radijalnim aktivacionim 14. return λˆ , P k |k k |k
funkcijama Gausovog tipa. Na osnovu poznatih karakteristika analiziranog
Linearni dinamički sistem u diskretnom obliku problema, potrebno je usvojiti početne vrednosti
dat je sledećim jednačinama:
sledećih veličina: vektora stanja sistema λ̂ 0|0 , matrice
λ k λ k 1| k 1 ε kovarijansi P0|0 , kovarijanse šumova sistema Q i
y k g λ k | k 1 , x k ω merenja R . Ulazne veličine u algoritam su ocena
(13) vektora stanja sistema λˆ k 1| k 1 , matrica kovarijansi
g λ k | k 1 , xk je veštačka neuronska mreža. ε i ω su vektora stanja Pk 1|k 1 u trenutku k 1| k 1 i želje-
odgovarajući beli šumovi ( ε ~ N ε, Q i na izlazna vrednost kao primer iz skupa za optimi-
ω ~ N ω, R ); y k je željeni izlazni vektor. Kao što se
zaciju y k . Može se primetiti da u ovakvoj postavci
može videti, optimizacija parametara podrazumeva Kalmanovog filtra željena vrednost y k iz skupa za
linearan sistem, što je predstavljeno identičnim pre- optimizaciju predstavlja „merenje”. Dakle, za zadate
slikavanjem λ k 1| k 1 λ k . Uvode se sledeće pret- početne uslove i usvojenu očekivanu grešku opti-
postavke: mizacije Ermin algoritam rekurzivno ocenjuje vektor
616 TEHNIKA – MAŠINSTVO 63 (2014) 4
N. VUKOVIĆ i dr. MAŠINSKO UČENJE VEŠTAČKE NEURONSKE MREŽE SA RADIJALNIM...
stanja shodno informaciji y k . U redu broj 5 i redu računaru „predstaviti” količinu našeg znanja/neznanja
o sistemu na sledeći način:
broj 6 se vrši predikcija vektora stanja λˆ k |k 1 i ma-
P0 Ι
trice kovarijansi Pk | k 1 . Red br. 7 definiše predviđa- P Ι0 (15)
nje merenja, što predstavlja izlazni vektor veštačke
neuronske mreže. S obzirom na nelinearnost senzo- Dakle, imajući u vidu (15), slučaj kada je naše
rskog modela, neophodno je izvršiti linearizaciju neznanje o sistemu veliko ( P ) prelaskom u in-
razvojem u Tejlorov red. Jakobijan veštačke neuro- formacioni prostor se jednostavno algebarski definiše
kao Ι 0 . Linearni dinamički sistem u diskretnom
nske mreže yˆ k g λˆ k | k 1 , x k u odnosu na elemente
obliku je formulisan jednačinom (13). Osnovne pret-
vektora stanja λ̂ je dat u redu br. 8. Matrica postavke koje su usvojene tom prilikom važe i u
pojačanja filtra je data u redu br. 9, dok se korak ovom slučaju. Pseudokod linearizovanog informacio-
korekcije sprovodi u redu br. 10 za vektor stanja si- nog filtra je dat u Algoritmu 2. Inicijalizacija
stema i u redu br.11 za matricu kovarijansi. Vektor algoritma započinje u redu br. 2 i redu br. 3, gde se
inovacije y k yˆ k predstavlja razliku između st- određuju početne vrednosti vektora stanja λ̂ 0|0 i
varne izlazne vrednosti y k i predviđanja veštačke početne matrice kovarijansi P0|0 , kao i kovarijanse
neuronske mreže yˆ k g λˆ k | k 1 , x k , koje je funkcija šuma sistema Q i šuma merenja R . Predikcija stanja
sistema se obavlja u redovima br. 5 i br. 6. Predikcija
ocene vektora stanja sistema λˆ k |k 1 i ulaznog vektora vektora stanja je identična kao i prilikom primene
x k . Vremenski indeks k označava da se u jednoj algoritma linearizovanog Kalmanovog filtra. Prva
iteraciji koristi jedan i samo jedan element iz skupa razlika se može videti u redu broj 6, gde se predviđa
ulazno-izlaznih parova koji se koriste za optimizaciju nova vrednost informacione matrice. Treba obratiti
parametara. Nakon sprovedene korekcije, izračunava pažnju da ova operacija podrazumeva dvostruku
se nova vrednost greške optimizacije za novu ocenu inverziju odgovarajućih matrica. Jakobijan veštačke
neuronske mreže je dat u redu broj 8. Korak korekcije
vektora stanja g λˆ k | k , x i svih ulaznih vektora iz sku-
algoritma započinje određivanjem informacione
pa za optimizaciju. Obratiti pažnju da vrednost greške matrice Ι k | k u trenutku k | k i pojačanja filtra K k .
Er predstavlja kvadratnu formu formiranu od svih Na kraju, u redu br. 11 se vrši modifikacija vektora
ulaznih primera i svih odziva mreže. stanja sistema na osnovu vektora inovacije
3.2. Mašinsko učenje primenom linearizovanog y k yˆ k . Određivanje trenutne greške učenja je
informacionog filtra dato u redu broj 12.
Za razliku od Kalmanovog filtra koji Gausovu Algoritam 2 - Pseudokod linearizovanog infor-
raspodelu modelira prvim i drugom momentom, macionog filtra za optimizaciju parametara veštačke
informacioni filtar u rekurzivnu estimacionu formu neuronske mreže sa radijalnim aktivacionim funkcija-
uvodi inverziju matrice kovarijansi P koja se naziva ma Gausovog tipa.
informaciona matrica i definiše se kao: 1. Algoritam LIF_RGAF (λˆ k 1| k 1 , Pk 1| k 1 , x k , y k )
Ι P 1
1
(14)
E λ 0|0 λˆ 0|0 λ 0|0 λˆ 0|0
T
2.E λ 0|0 λˆ 0|0 ; Ι 0|0
Matrica P predstavlja meru neodređenosti stanja 3.Q diag dim λ ; R diag dim y k
sistema, a velike vrednosti nam ukazuju na to da po- 4. while Er Ermin
stoji značajna neodređenost u pogledu ocene vektora 5. λˆ λˆ
k | k 1 k 1| k 1
stanja. Ukoliko P to nam govori da nemamo
1
Ι k | k 1 Ι k 1| k 1 Q
1
6.
nikakvo predznanje o sistemu. Naravno, kada P 0
imamo „idealnu” situaciju, znamo sve potrebne in- 7.
yˆ k g λˆ k | k 1 , x k
formacije o sistemu. Problem koji se javlja prilikom 8. H k λ yˆ ik w g () μ g () g ()
ocenjivanja u slučaju kada nemamo dovoljno infor- 9. Ι k | k Ι k | k 1 HTk R k1H k
macija o sistemu je kada P . U praktičnim prime- 10. K k Ι k | k HTk R k1
1
nama Kalmanovog filtra nemoguće je računaru pre-
11. λˆ k | k λˆ k | k 1 K k y k yˆ k
dočiti ovu situaciju na optimalan način. Zbog toga se
1
y g λˆ
T
uvodi ocenjivanje u informacionom prostoru, koji 12. Er y g λˆ k | k , x k |k ,x
2
podrazumeva informacioni vektor i informacionu 13. endwhile
matricu. Inverzijom matrice kovarijansi moguće je 14. return λˆ , Ι k |k k |k
TEHNIKA – MAŠINSTVO 63 (2014) 4 617
N. VUKOVIĆ i dr. MAŠINSKO UČENJE VEŠTAČKE NEURONSKE MREŽE SA RADIJALNIM...
3.3. Mašinsko učenje primenom algoritma prethodnog znanja da promenljiva x podleže
specifične aproksimacije momenata Gausovoj raspodeli sa očekivanom vrednošću x i
Linearizacija nelinearnih jednačina modela siste- kovarijansom P.
ma i senzorskog modela razvijanjem u Tejlorov red Očekivana vrednost (prvi moment) i kovarijansa
rezultira uvođenjem grešaka u proces ocenjivanja, s (drugi moment) promenljive y su:
obzirom na to da odgovarajući Jakobijani ne mogu sa 2dim x
dovoljnom tačnošću da modeliraju promenu stanja y Wi m Ψ i
nelinearnog sistema. Ove greške dovode do naru- i 0
2dim x
šavanja optimalnosti (time i tačnosti) i mogu izazvati
Wi k Ψ i y Ψ i y
T
P
divergenciju filtra. Algoritam specifične aproksima- i 0 (19)
cije momenata (ASAM) ne vrši linearizaciju neli-
nearnog sistema razvijanjem jednačina modela siste- a konstantni težinski koeficijenti su
ma i senzorskog modela u Tejlorov red. Osnovna ide-
ja ASAM-a počiva na intuiciji da je jednostavnije ap-
W0m dim x
roksimirati poznatu gustinu raspodele stohastičke pro- W0k dim x 1 2
menljive nego polazne nelinearne modele [1]. Al-
Wi m W 1 2 dim x ,
k
goritam počiva na specifičnoj transformaciji nelinea- i
rne funkcije stohastičke promenljive. i 1,..., 2dim x
(20)
Neka je data proizvoljna nelinearna funkcija
y f x i neka argument funkcije x podleže Gau- Optimalna vrednost konstantnog parametra za
sovoj raspodeli sa poznatim statistikama x i P . Gausovu raspodelu je 2 [1]. Prikazana aproksi-
Potrebno je izračunati nepoznate statistike promenlji- macija momenata promenljive y , koja je nelinearna
ve y nakon što je primenjena nelinearna funkcija funkcija nekih drugih stohastičkih promenljivih, višeg
f na argument x . Prvo je potrebno formirati je reda tačnosti od linearizacije ostvarene razvijanjem
u Tejlorov red.
matricu sigma tačaka Σ na sledeći način:
Nakon uvođenja osnovne transformacije na kojoj
Σ0 x ASAM počiva, moguće je pokazati kako se ova ideja
Σi x dim x P i
,
može primeniti na problem mašinskog učenja.
Algoritam optimizacije baziran je na osnovnoj reku-
i 1,...,dim x rzivnoj formulaciji linearizovanog Kalmanovog filtra.
Međutim, u ASAM algoritmu nema potrebe za izra-
Σi x dim x P i dim x
, čunavanjem Jakobijana. Algoritam je prikazan u Al-
i dim x 1,.., 2 dim x
goritmu 3.
(16) Algoritam 3 - Pseudokod algoritma ocenjivanja
je skalarni parametar koji određuje širinu opsega parametara veštačke neuronske mreže sa radijalnim
aktivacionim funkcijama Gausovog tipa baziran na
tačaka Σi i izračunava se kao
Kalmanovom filtru i specifičnoj aproksimaciji mome-
2 dim x dim x nata.
(17) Algoritam započinje inicijalizacijom u redu br. 2 i
Ostali skalarni parametri su 104 ,1 ; redu br. 3, gde se definišu početne vrednosti vektora
stanja λ̂ 0|0 , početne matrice kovarijansi P0|0 , kova-
0,dim x . Vektori kolone pomoću kojih se vr-
ijanse šuma sistema Q i šuma merenja R . U redo-
ši aproksimacija nelinearne funkcije nazivaju se vima broj 5 i broj 6 vrši se predikcija ocene vektora
sigma tačke. Dakle, matricu Σ čini 2dim x 1 si- stanja λˆ k |k 1 i matrice kovarijansi Pk | k 1 .
gma tačaka. Nakon formiranja matrice sigma tačaka
Prva razlika u odnosu na LKF može se videti u
Σi , na njene vektor kolone se primenjuje nelinearna
redu broj 7 gde se određuje matrica Σi , čije su kolo-
funkcija f , odnosno:
ne sigma tačke. Kao što se može videti, u redu br. 8
Ψ i f Σi , i 0,..., 2dim x se određuje izlazna vrednost veštačke neuronske
(18) mreže, na osnovu mogućih vrednosti koje mogu imati
Matrica Ψi je matrica svih mogućih vrednosti parametri mreže (vrednosti određene sigma tačkama)
koje promenljiva y f x može da ima na osnovu i poslednjeg ulaznog vektora x k . U redu br. 9 se od-
618 TEHNIKA – MAŠINSTVO 63 (2014) 4
N. VUKOVIĆ i dr. MAŠINSKO UČENJE VEŠTAČKE NEURONSKE MREŽE SA RADIJALNIM...
ređuje (uslovno) matematičko očekivanje izlazne vre- ćanje matrice šuma merenja R direktno utiče na „po-
dnosti veštačke neuronske mreže na osnovu izraču- verenje” filtra u merenje. Ukoliko je R veliko, filtar
natih svih izlaznih vrednosti uvođenjem sigma tačaka. će više verovati koraku predikcije; ukoliko je R malo,
Ocenjivanje parametara se nastavlja određivanjem onda će filtar „imati poverenja” u merenje y(k).
kovarijanse Pyˆ k yˆ k u redu br. 10 i kroskovarijanse Kao i svi iterativni postupci određivanja minimu-
ma funkcije cilja, i Kalamanov filtar može odrediti
Pλˆ yˆ u redu broj 11, kao i izračunavanjem Kalmano-
k k jedan od mogućih višestrukih lokalnih minimuma
vog pojačanja Kk u redu broj 12. umesto globalnog minimuma. Međutim, Kalmanov
1.Algoritam ASAM_RGAF ( λˆ k 1| k 1 , Pk 1| k 1 , x k , y k ) filtar je algoritam drugog reda tačnosti, s obzirom na
to da uzima u obzir i lokalnu zakrivljenost funkcije
E λ 0|0 λˆ 0|0 λ 0|0 λˆ 0|0 P
T
2.E λ 0|0 λˆ 0|0 ; cilja. Ova činjenica je od važnosti za izbegavanje lo-
0|0
kalnog minimuma.
3.Q diag dim λ ; R diag dim y k U drugom delu ovog rada prikazani su eksperi-
4. while Er Ermin mentalni rezultati ostvareni primenom veštačke neu-
ronske mreže sa radijalnim aktivacionim funcijama
5. λˆ λˆ
k | k 1 k 1| k 1
Gausovog tipa, čiji parametri su određeni pomoću
6. Pk | k 1 P k 1| k 1 Q uvedenih sekvencijalnih algoritama mašinskog učenja
7. Σi λˆ k | k 1 λˆ k | k 1 P λˆ k | k 1 P
na bazi Kalmanovog filtra, za modeliranje četiri real-
na problema iz inženjerske prakse.
8. Ψ i , k |k 1 g Σi , x k
2dim x
ZAHVALNOST
9. yˆ k
i 1
Wi Ψ i , k |k 1 E g λˆ k |k 1 , xk
m
Rad je nastao u okviru istraživanja na projektu
2dim x
„Inovativni pristup u primeni inteligentnih tehnolo-
Wi k Ψ i , k |k 1 yˆ k Ψ i , k |k 1 yˆ k R ških sistema za proizvodnju delova od lima zasnovan
T
10. Pyˆ k yˆ k i 1 na ekološkim principima“ (TR-35004), koji je po-
2dim x držan od strane Ministarstva prosvete, nauke i tehno-
Ψ yˆ k
T
11. Pλˆ ˆk
Wi k Σi λˆ k i , k |k 1 loškog razvoja Vlade Republike Srbije.
ky
i 1
P
1
12. K k Pλˆ ˆk yˆ k yˆ k LITERATURA
ky
13. λˆ k | k λˆ k | k 1 K k (y k yˆ k ) [1] Vuković, N., Razvoj mašinskog učenja inteligen-
14. Pk | k Pk | k 1 K k Pyˆ k yˆ k K T tnog mobilnog robota baziran na sistemu veštačkih
k
neuronskih mreža, doktorska disertacija, Univerzitet
1
y g λˆ
T
15. Er y g λˆ k | k , x ,x u Beogradu - Mašinski fakultet, 2012. (DOI:
k |k
2 10.2298/BG20120928VUKOVIC)
16. endwhile
[2] Vuković, N., Miljković, Z., A Growing and Pruning
17. return λˆ , P k |k k |k Sequential Learning Algorithm of Hyper Basis Fun-
Nakon svih sprovedenih koraka, korekcija vek- ction Neural Network for Function Approximation,
tora stanja i greške ocene je data u redu broj 13 i redu Neural Networks, 46C, pp. 210-226, 2013. (DOI:
10.1016/j.neunet.2013.06.004)
broj 14. Određivanje trenutne vrednosti greške opti-
mizacije je dato u poslednjem redu. [3] Miljković, Z., Sistemi veštačkih neuronskih mreža u
proizvodnim tehnologijama, Univerzitet u Beogradu
4. DISKUSIJA - Mašinski fakultet, Beograd 2003.
Na kraju ove analize bi trebalo izvršiti poređenje
parametara razvijenih algoritama mašinskog učenja sa [4] Miljković, Z., Aleksendrić, D., Veštačke neuronske
mreže - zbirka rešenih zadataka sa izvodima iz teo-
poznatim algoritmima mašinskog učenja [4]. U tim
rije, Univerzitet u Beogradu - Mašinski fakultet, Be-
algoritmima se uvode konstantni parametri poznatiji
ograd 2009.
kao parametri učenja pomoću kojih se kontroliše br-
zina optimizacije. Analogno ovim parametrima, od- [5] Vuković, N., Miljković, Z., Babić, B., Bojović, B.,
govarajuće matrice Kalmanovog filtra imaju sličnu Training of Radial Basis Function Networks with
ulogu. Matrica šuma sistema Q direktno utiče na oce- H∞ Filter-Initial Simulation Results, Proceedings of
nu kovarijanse sistema. Povećavanjem matrice šuma the 6th International Working Conference ”Total
sistema možemo kontrolisati dužinu inkrementalnih Quality Management – Advanced and Intelligent
koraka, odnosno brzinu konvergencije filtra. Pove- Approaches”, pp. 163-168,Belgrade, Serbia, 2011.
TEHNIKA – MAŠINSTVO 63 (2014) 4 619
N. VUKOVIĆ i dr. MAŠINSKO UČENJE VEŠTAČKE NEURONSKE MREŽE SA RADIJALNIM...
[6] Lazaro, M., Santamari I., Pantaleo C., A new EM- [10] Simon, D, Training Radial Basis Function Neural
based training algorithm for RBF networks, Neural Networks with the Extended Kalman Filter, Neuro-
Networks, 16, pp. 69-77, 2003. computing, 48, pp. 455-475, 2001.
[7] Schwenker, F., Kestler, H.A., Palm, G., Three lear- [11] Huang, G. B., Saratchandran, P., Sundararajan, N.,
ning phases for radial-basis-function networks. Ne- A generalized growing and pruning RBF (GGAP-
ural Networks, 1(4-5), pp. 439-58, 2001. RBF) neural network for function approximation.
IEEE Transactions on Neural Networks, 16(1), pp.
[8] Vuković, N., Miljković, Z., Babić, B., Čović, N., 57–67, 2005.
Towards implementation of intelligent mobile robo-
ts in a manufacturing environment, Proceedings of [12] Bortman, M., Aladjem M., A Growing and Pruning
the 4th International Conference on Manufacturing Method for Radial Basis Function Networks, IEEE
Engineering (ICMEN 2011), pp 367-376, Thessalo- Transactions on Neural Networks, 20(6), pp. 1039-
niki, Greece, 2011. 1045, 2009.
[9] Karayiannis, N. B., Reformulated Radial Basis Ne- [13] Han, H. G., Chen, Q. L., Qiao, J. F., An efficient
ural Networks Trained by Gradient Descent, IEEE self-organizing RBF neural network for water qua-
Transactions on Neural Networks, 10(3), pp. 657– lity prediction. Neural Networks, 24(7), pp. 717-
671, 1999. 725, 2011.
SUMMARY
MACHINE LEARNING OF RADIAL BASIS FUNCTION NEURAL NETWORK BASED ON
KALMAN FILTER - INTRODUCTION
This paper analyzes machine learning of radial basis function neural network based on Kalman fi-
ltering. Three algorithms are derived: linearized Kalman filter, linearized information filter and un-
scented Kalman filter. We emphasize basic properties of these estimation algorithms, demonstrate how
their advantages can be used for optimization of network parameters, derive mathematical models and
show how they can be applied to model problems in engineering practice.
Key words: machine learning, artificial neural network, Kalman filter
620 TEHNIKA – MAŠINSTVO 63 (2014) 4
You might also like
- HERODOT - IstorijaDocument408 pagesHERODOT - Istorijaaleksandritis100% (1)
- Java - Zadaci UradjeniDocument242 pagesJava - Zadaci Uradjeniciko82100% (4)
- Pravopis Srpskog Jezika 1994Document508 pagesPravopis Srpskog Jezika 1994yakbla91% (11)
- Enohijanska MagijaDocument70 pagesEnohijanska MagijaAleksandra Stojicevic100% (3)
- MATLAB I Mašinsko UčenjeDocument6 pagesMATLAB I Mašinsko UčenjeAnonymous DgWkoyXPANo ratings yet
- Marko Aurelije - Samom SebiDocument109 pagesMarko Aurelije - Samom SebiĆađo133100% (24)
- Alister Krouli - Knjiga LažiDocument72 pagesAlister Krouli - Knjiga LažiΑΙΘΗΡNo ratings yet
- Aleksander Bajt - Bermanov Dosije PDFDocument1,292 pagesAleksander Bajt - Bermanov Dosije PDFVlado Vujnovic100% (1)
- Alister Krouli - Ji ĐingDocument95 pagesAlister Krouli - Ji ĐingΑΙΘΗΡ100% (4)
- Mavro Orbin-Kraljevstvo SlovenaDocument391 pagesMavro Orbin-Kraljevstvo Slovenagoca95% (20)
- Starac Josif Isihasta Izlozenje Monaskog OpitaDocument294 pagesStarac Josif Isihasta Izlozenje Monaskog OpitaBranko NikolicNo ratings yet
- Neuronske MrezeDocument35 pagesNeuronske MrezeMaja RasitovicNo ratings yet
- NEURONSKE MREŽE - PredavanjaDocument29 pagesNEURONSKE MREŽE - PredavanjaAnonymous DgWkoyXPANo ratings yet
- NEURONSKE MREZE - PredavanjaDocument28 pagesNEURONSKE MREZE - PredavanjaAlen IrovićNo ratings yet
- Primeri Primene Vestackih Neuronskih Mreza PDFDocument32 pagesPrimeri Primene Vestackih Neuronskih Mreza PDFManojlovic VasoNo ratings yet
- Vestacke Neuronske MrezeDocument15 pagesVestacke Neuronske MrezeМилош ШарацNo ratings yet
- Neuronske Mreze I Njihovo ObučavanjeDocument25 pagesNeuronske Mreze I Njihovo ObučavanjeMarijaNo ratings yet
- Neuronske MrezeDocument23 pagesNeuronske MrezeteslanikolarNo ratings yet
- Inteligentni Sistemi MrezeDocument22 pagesInteligentni Sistemi Mrezenikola90bbNo ratings yet
- Предавање 4- Рекурзивни алгоритми и Тјурингова машинаDocument21 pagesПредавање 4- Рекурзивни алгоритми и Тјурингова машинаOgnjen BogicevicNo ratings yet
- Neuronske Mreze - PredavanjeDocument47 pagesNeuronske Mreze - PredavanjeMarijaNo ratings yet
- Primena Matlab ADocument18 pagesPrimena Matlab ADragan LazicNo ratings yet
- Numericka Analiza II PDFDocument216 pagesNumericka Analiza II PDFJasonNo ratings yet
- Mitnop SkriptaDocument20 pagesMitnop SkriptaNefertiti DamnjanovicNo ratings yet
- Задатак -Имплементација ЕРП Система -Здравко ЈовановићDocument7 pagesЗадатак -Имплементација ЕРП Система -Здравко Јовановићzdravkojovanovic23No ratings yet
- Algoritmi (Tjuringova Masina, Markovljevi Normalni Lagoritmi,... )Document42 pagesAlgoritmi (Tjuringova Masina, Markovljevi Normalni Lagoritmi,... )milanj_8No ratings yet
- Seminarski RadDocument10 pagesSeminarski RadDarko StosicNo ratings yet
- Meko Racunarstvo - Predvidjanje Vremenskih Serija Pomocu Neuronskih MrezaDocument5 pagesMeko Racunarstvo - Predvidjanje Vremenskih Serija Pomocu Neuronskih MrezawelzarNo ratings yet
- Predavanje 3Document22 pagesPredavanje 3Miljan VeljovicNo ratings yet
- Open NNDocument3 pagesOpen NNJelena MilenkovićNo ratings yet
- Neuronske Mreze - PrezentacijaDocument24 pagesNeuronske Mreze - PrezentacijaSabina MoorNo ratings yet
- Izvestaj Inteligentno UpravljanjeDocument6 pagesIzvestaj Inteligentno UpravljanjeDusan MilkeNo ratings yet
- Vestacka InteligencijaDocument5 pagesVestacka InteligencijaМирослав АлександровићNo ratings yet
- ANFIS-doktorska DisertacijaDocument141 pagesANFIS-doktorska DisertacijaDragan PamučarNo ratings yet
- EuM I Kolokvijum Odgovori 1Document12 pagesEuM I Kolokvijum Odgovori 1JovanaNo ratings yet
- Sazetak Vestacke InteligencijeDocument8 pagesSazetak Vestacke InteligencijeStevan GlavaskiNo ratings yet
- Ispitna Pitanja I Odgovori - Inteligentni SistemiDocument18 pagesIspitna Pitanja I Odgovori - Inteligentni Sistemidamjan_radenkovicNo ratings yet
- Neuronske Mreze I Mogucnost Primene U Elektromotornim Pogonima - Panto RankovicDocument33 pagesNeuronske Mreze I Mogucnost Primene U Elektromotornim Pogonima - Panto RankovicdacaNo ratings yet
- Vestacka InteligencijaDocument6 pagesVestacka InteligencijaStevan GlavaskiNo ratings yet
- Vestacka InteligencijaDocument11 pagesVestacka InteligencijaMarija Stepanovic0% (1)
- DMijucamagistartski RadDocument50 pagesDMijucamagistartski RadSrdjanNo ratings yet
- ML TutorijalDocument22 pagesML TutorijalMarianNo ratings yet
- Osnovi Racunarske Tehnike - 7Document28 pagesOsnovi Racunarske Tehnike - 7InfernoplexNo ratings yet
- Sayyed Bandar-SIAP-Predlog ProjektaDocument6 pagesSayyed Bandar-SIAP-Predlog ProjektaAnonymous g02VMEKWJgNo ratings yet
- Meko Racunarstvo - Jasmin PavlovicDocument7 pagesMeko Racunarstvo - Jasmin PavlovicJasmin1990ghfghNo ratings yet
- 1 KLK NoopDocument12 pages1 KLK NoopRanko NikolicNo ratings yet
- Modifikatori Lingvistickih VrednostiDocument8 pagesModifikatori Lingvistickih VrednostiNenad DajićNo ratings yet
- Odgovori Teorija Inteligentni Sistemi FONDocument30 pagesOdgovori Teorija Inteligentni Sistemi FONmmilanović_11No ratings yet
- Kvantna Mehanika - Fedor HerbutDocument513 pagesKvantna Mehanika - Fedor HerbutRanko VindzanovicNo ratings yet
- Telekomunikaciona MerenjaDocument22 pagesTelekomunikaciona Merenjaborismuzgonja31No ratings yet
- Neuronske MrežeDocument14 pagesNeuronske MrežeGamer Iz PotokaNo ratings yet
- Igranje Super Mario KartDocument7 pagesIgranje Super Mario KartBufa BudjaNo ratings yet
- VestackaInteligencija PitanjaSaKolokvijuma1Document14 pagesVestackaInteligencija PitanjaSaKolokvijuma1Marija DjuricNo ratings yet
- Identifikacija SistemaDocument5 pagesIdentifikacija Sistemapetar petrovicNo ratings yet
- Teme Doktoranti IFHigh EnergyDocument2 pagesTeme Doktoranti IFHigh EnergyИгор МиликићNo ratings yet
- 2019 Praktikum V1Document77 pages2019 Praktikum V1Mesko MehmedovicNo ratings yet
- Uvod U PythonDocument25 pagesUvod U PythonMirko Nikodijević0% (1)
- Vežba 3 - OdabiranjeDocument15 pagesVežba 3 - Odabiranjedr IggyNo ratings yet
- Microstrip Optimisation Y2000Document26 pagesMicrostrip Optimisation Y2000AcaNo ratings yet
- Neuronske Mreže (RBF Neural Networks)Document11 pagesNeuronske Mreže (RBF Neural Networks)Jelena KeravicaNo ratings yet
- UntitledDocument125 pagesUntitledPetar RodicNo ratings yet
- Ekspertni Sistemi OsnovnoDocument24 pagesEkspertni Sistemi OsnovnoNesovic VladimirNo ratings yet
- Mate Ma TikaDocument481 pagesMate Ma TikaДамјан ТоневскиNo ratings yet
- Istrazivacki Rad TreciDocument11 pagesIstrazivacki Rad TreciNikola NikolićNo ratings yet
- Stanislav Krakov - KRILADocument60 pagesStanislav Krakov - KRILAljivigNo ratings yet
- Ja Sam Neko Ko Bi Trebalo Da Bude Ja Nula K:: Identitet (Post) Humanog Subjekta U Romanu Dona de LilaDocument17 pagesJa Sam Neko Ko Bi Trebalo Da Bude Ja Nula K:: Identitet (Post) Humanog Subjekta U Romanu Dona de LilaBranko NikolicNo ratings yet
- Anton Pavlović-Čehov Sabrana Dela (Knjiga 6)Document123 pagesAnton Pavlović-Čehov Sabrana Dela (Knjiga 6)Branko NikolicNo ratings yet
- Issn 1450-9792Document346 pagesIssn 1450-9792dejoooooooNo ratings yet
- Anton Pavlovic Cehov - Sabrana Dela 7Document129 pagesAnton Pavlovic Cehov - Sabrana Dela 7Tatjana JovanovicNo ratings yet
- 18021772 Путовање по Србији 1829 Ото Дубислав Пирх Путовање по Србији 1827 Ђорђе МагарашевићDocument162 pages18021772 Путовање по Србији 1829 Ото Дубислав Пирх Путовање по Србији 1827 Ђорђе МагарашевићBranko NikolicNo ratings yet
- Sima Lukin Lazic - Dvije OskoruseDocument33 pagesSima Lukin Lazic - Dvije OskoruseMarkoNikolicNo ratings yet
- Anton Pavlovic Cehov - Sabrana Dela (Knjiga 3) - Markups PDFDocument231 pagesAnton Pavlovic Cehov - Sabrana Dela (Knjiga 3) - Markups PDFMikenaJavinaNo ratings yet
- Zilahy Lajos - Samrtno ProljeceDocument259 pagesZilahy Lajos - Samrtno ProljeceEmina Becic Trnka100% (2)
- Tit Livije Istorija Rima II PDFDocument350 pagesTit Livije Istorija Rima II PDFhistoricus100% (12)
- Istorija Srba U Ugarskoj Od Pada Smedereva Do Seobe Pod Carnojevicem 1459-1690 Aleksa IvicDocument283 pagesIstorija Srba U Ugarskoj Od Pada Smedereva Do Seobe Pod Carnojevicem 1459-1690 Aleksa Ivicvuk300100% (3)
- Muzeji 7 N S Museums No 7 N SDocument246 pagesMuzeji 7 N S Museums No 7 N SLjubisa VasiljevicNo ratings yet
- Zakonik Cara Dušana 1349 I 1354Document474 pagesZakonik Cara Dušana 1349 I 1354Dusan Mitrović100% (4)
- Irinej Bulovic - Tumacenje Na MT 1.25Document5 pagesIrinej Bulovic - Tumacenje Na MT 1.25Branko NikolicNo ratings yet
- Crno Jagnje Sivi Soko - Putovanje Kroz Jugoslaviju - Rebecca West PDFDocument1,277 pagesCrno Jagnje Sivi Soko - Putovanje Kroz Jugoslaviju - Rebecca West PDFAnonymous OARSwGsNo ratings yet
- DR Željko Fajfrić Župan Nikola Altomanović PDFDocument107 pagesDR Željko Fajfrić Župan Nikola Altomanović PDFBranko NikolicNo ratings yet
- Tajna Tesline Sobe 3327Document3 pagesTajna Tesline Sobe 3327Branko NikolicNo ratings yet
- V-Petar Vasilijadis Citanje Svetog Pisma Sa Gledista Pravoslavne CrkveDocument6 pagesV-Petar Vasilijadis Citanje Svetog Pisma Sa Gledista Pravoslavne CrkveBrankoNo ratings yet
- Dj-Djurovic Zoran - Stvarne Isusove IzrekeDocument3 pagesDj-Djurovic Zoran - Stvarne Isusove IzrekeBranko NikolicNo ratings yet
- Tajne Vukove ReformeDocument229 pagesTajne Vukove ReformeBranko NikolicNo ratings yet
- Otkrivenje Jovanovo I Liturgija Drevne Crkve - Final 2Document11 pagesOtkrivenje Jovanovo I Liturgija Drevne Crkve - Final 2Бранка ПрерадовићNo ratings yet