You might also like
- Mega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3From EverandMega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3No ratings yet
- IBM Server Báo Giá Tháng 7Document8 pagesIBM Server Báo Giá Tháng 7tuyensandy1983No ratings yet
- Tugas Sistem MikroDocument10 pagesTugas Sistem MikroIlmu PurbakalaNo ratings yet
- MK-4306 - Introduction To Microcontroller PDFDocument39 pagesMK-4306 - Introduction To Microcontroller PDFMr AllRoundersNo ratings yet
- 借助ST强大的生态系统让STM32MP1的配置如此简单Document48 pages借助ST强大的生态系统让STM32MP1的配置如此简单sung quekNo ratings yet
- Intel Xeon OverclockingDocument23 pagesIntel Xeon OverclockingVlad VahnovanuNo ratings yet
- Table For Hardware PlatformDocument1 pageTable For Hardware PlatformVijayNo ratings yet
- ARMADA Embedded Processors Ext For ARM July 2017 v5Document18 pagesARMADA Embedded Processors Ext For ARM July 2017 v5patrickkenNo ratings yet
- Moving Up To ARMDocument128 pagesMoving Up To ARMlilianfis100% (1)
- Microprocessors & Interfacing For GITAM University ECEDocument118 pagesMicroprocessors & Interfacing For GITAM University ECEDr Sreenivasa Rao Ijjada100% (1)
- Arduino UNO STM32: Comparision Between andDocument1 pageArduino UNO STM32: Comparision Between andKarthik SDNo ratings yet
- stm32f407vg Part1Document30 pagesstm32f407vg Part1David MoodyNo ratings yet
- ARCHITECHTURE of 8085Document35 pagesARCHITECHTURE of 8085Aakash GargNo ratings yet
- STM 32 F 401 ReDocument131 pagesSTM 32 F 401 ReAgustin OrtizNo ratings yet
- STM32L4Plus Introduction Delta STM32L4 SeriesDocument33 pagesSTM32L4Plus Introduction Delta STM32L4 SeriesbbaskiiNo ratings yet
- Micro Processer 8086-1Document91 pagesMicro Processer 8086-1نورالدين علي عليNo ratings yet
- 1 Introduction To 8086Document18 pages1 Introduction To 8086Sudeeksha GanguliNo ratings yet
- STM32F40Xxx PDFDocument202 pagesSTM32F40Xxx PDFLorisBruzziNo ratings yet
- STM32407 VG 6Document201 pagesSTM32407 VG 6Minidu PradeepthaNo ratings yet
- Kingston Khx3200c16d4 8gxDocument3 pagesKingston Khx3200c16d4 8gxAlejandro GonzalezNo ratings yet
- Infineon S25FL064L 64 Mbit 8 Mbyte 3 DataSheet v09-3363728Document173 pagesInfineon S25FL064L 64 Mbit 8 Mbyte 3 DataSheet v09-3363728ManunoghiNo ratings yet
- Stm32f446ret6 PDFDocument202 pagesStm32f446ret6 PDFNguyen Trong NghiaNo ratings yet
- INTRO TO 8086 MICROPROCESSOR AND INTERFACINGDocument18 pagesINTRO TO 8086 MICROPROCESSOR AND INTERFACINGPREETI SAI THANDAVAN 20BCE1740No ratings yet
- Factors For Choosing An Soc Fpga: Architecture BriefDocument4 pagesFactors For Choosing An Soc Fpga: Architecture Briefvijaykumar ponugotiNo ratings yet
- MPMC Unit I 2021Document17 pagesMPMC Unit I 2021Venkatasamy EEENo ratings yet
- 1166 BT ControllerDocument16 pages1166 BT ControllerarthurcraigNo ratings yet
- Dsa Ed A 00066161Document44 pagesDsa Ed A 00066161AlbertNo ratings yet
- STM32F745xx STM32F746xxDocument228 pagesSTM32F745xx STM32F746xxBenNo ratings yet
- Manual Funciones Alternantes stm32f7Document227 pagesManual Funciones Alternantes stm32f7erika salinasNo ratings yet
- AVRONEDocument11 pagesAVRONEmekki1No ratings yet
- STM32F205VCT6Document179 pagesSTM32F205VCT6JarekNo ratings yet
- 32-Bit Arm Cortex - M7 280 MHZ Mcus, 2-Mbyte Flash Memory, 1.4 Mbyte Ram, 46 Com. and Analog Interfaces, SMPS, CryptoDocument231 pages32-Bit Arm Cortex - M7 280 MHZ Mcus, 2-Mbyte Flash Memory, 1.4 Mbyte Ram, 46 Com. and Analog Interfaces, SMPS, CryptoidmeriNo ratings yet
- AutocomDocument177 pagesAutocomEsmael Rodrigues PetitNo ratings yet
- STM32F103C8T6 PDFDocument68 pagesSTM32F103C8T6 PDFfebri kurniaNo ratings yet
- eSOM335x HardwareManualDocument20 pageseSOM335x HardwareManualAbolfazl SaeedieNo ratings yet
- STM32MCU BasicsDocument16 pagesSTM32MCU BasicsNanang Roni WibowoNo ratings yet
- Access HW InfoDocument3 pagesAccess HW Infojayakrishna173157No ratings yet
- STM 32 F 215 ReDocument180 pagesSTM 32 F 215 ReВиталик НикишинNo ratings yet
- Microprocessor Systems (Μp 2) : Goal: PC Hardware StudyDocument30 pagesMicroprocessor Systems (Μp 2) : Goal: PC Hardware StudyTruong van TruongNo ratings yet
- 32-Bit Arm Cortex - M7 280 MHZ Mcus, Up To 2-Mbyte Flash Memory, 1.4 Mbyte Ram, 46 Com. and Analog Interfaces, SmpsDocument230 pages32-Bit Arm Cortex - M7 280 MHZ Mcus, Up To 2-Mbyte Flash Memory, 1.4 Mbyte Ram, 46 Com. and Analog Interfaces, SmpsMARS Design & Automation ServicesNo ratings yet
- STM32 F4Document203 pagesSTM32 F4riefquerNo ratings yet
- Stm32f401re PDFDocument135 pagesStm32f401re PDFGhionNo ratings yet
- 8085 Introduction - OptDocument36 pages8085 Introduction - OptVenkatasamy EEENo ratings yet
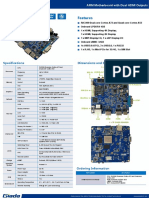
- Giada ARM-RK3399 Board with Dual HDMI OutputsDocument1 pageGiada ARM-RK3399 Board with Dual HDMI Outputswe diyanNo ratings yet
- Stm32f412ce DSDocument201 pagesStm32f412ce DSHaojiong ZhangNo ratings yet
- REN_r01ds0429ej0100-rzv2h_DST_20231224Document21 pagesREN_r01ds0429ej0100-rzv2h_DST_20231224demon_riceNo ratings yet
- STM32G031x4/x6/x8: Arm Cortex - M0+ 32-Bit MCU, Up To 64 KB Flash, 8 KB RAM, 2x USART, Timers, ADC, Comm. I/Fs, 1.7-3.6VDocument117 pagesSTM32G031x4/x6/x8: Arm Cortex - M0+ 32-Bit MCU, Up To 64 KB Flash, 8 KB RAM, 2x USART, Timers, ADC, Comm. I/Fs, 1.7-3.6VDomRuanNo ratings yet
- STM32 Microcontroller General Oct2012Document69 pagesSTM32 Microcontroller General Oct2012dcesentherNo ratings yet
- Características Del ComputadorDocument3 pagesCaracterísticas Del ComputadorDayane RamirezNo ratings yet
- Module 1 8085 Microprocessors and ArchitDocument29 pagesModule 1 8085 Microprocessors and ArchitGow GowthamNo ratings yet
- Session - I Microprocessors-The Solution in Search of ProblemsDocument75 pagesSession - I Microprocessors-The Solution in Search of ProblemsPratik PetkarNo ratings yet
- stm32f429 DM00071990Document208 pagesstm32f429 DM00071990mawidhi100% (1)
- en.flstm32wbDocument2 pagesen.flstm32wbjaaguirreNo ratings yet
- C Capo MB89P568-101Document60 pagesC Capo MB89P568-101Nicolas SixNo ratings yet
- LPC2109 2119 2129Document46 pagesLPC2109 2119 2129Martin SkladanyNo ratings yet
- MB95F108H MicrocontrolerDocument30 pagesMB95F108H Microcontrolermalk10No ratings yet
- Module 5 MergedDocument98 pagesModule 5 MergedNithish Kumar A NNo ratings yet
- RMT3010EC58E8F-1333 DDR3 Memory ModuleDocument8 pagesRMT3010EC58E8F-1333 DDR3 Memory ModuleDomingo79No ratings yet
- Stm32h725ae PDFDocument283 pagesStm32h725ae PDFWardana Herna AksaniNo ratings yet
- Milestone of MicrocontrollersDocument2 pagesMilestone of MicrocontrollersJhay-r PanaNo ratings yet
- EE3104C Tutorial 1 - Transmission LinesDocument2 pagesEE3104C Tutorial 1 - Transmission LinesDerek WangNo ratings yet
- Read Sensor and Toggle LED with Button InterruptDocument10 pagesRead Sensor and Toggle LED with Button InterruptDerek WangNo ratings yet
- EE4204 TEE4204 Aug 2022 Tutorial 1Document14 pagesEE4204 TEE4204 Aug 2022 Tutorial 1Derek WangNo ratings yet
- EE3104 - L2 Smith Chart and Microwave Network ParametersDocument36 pagesEE3104 - L2 Smith Chart and Microwave Network ParametersDerek WangNo ratings yet
- EE4204/TEE4204 Framing TechniquesDocument29 pagesEE4204/TEE4204 Framing TechniquesDerek WangNo ratings yet
- EE3104 - L1 TL and Telegrapher EquationDocument29 pagesEE3104 - L1 TL and Telegrapher EquationDerek WangNo ratings yet
- EE3104 - L0 IntroductionDocument26 pagesEE3104 - L0 IntroductionDerek WangNo ratings yet
- First Order ODE Forced OscillationsDocument2 pagesFirst Order ODE Forced OscillationsDerek WangNo ratings yet
- Catalyst 3560 SeriesDocument1 pageCatalyst 3560 SeriesArt ronicaNo ratings yet
- Teseo Liv3fDocument37 pagesTeseo Liv3fJulio MuñozNo ratings yet
- CS4000 Service and Maintenance Manual PDFDocument72 pagesCS4000 Service and Maintenance Manual PDFAthul Tuttu100% (1)
- OOP Lec 2 - Arrays, Vectors & Multi-dimensional Arrays in CDocument14 pagesOOP Lec 2 - Arrays, Vectors & Multi-dimensional Arrays in CRayyan HassanNo ratings yet
- Bugreport Alioth - Id RKQ1.200826.002 2022 06 20 21 15 13 Dumpstate - Log 9162Document34 pagesBugreport Alioth - Id RKQ1.200826.002 2022 06 20 21 15 13 Dumpstate - Log 9162Setyo WatiNo ratings yet
- Huawei OceanStor V3 Converged Storage Interoperability MatrixDocument429 pagesHuawei OceanStor V3 Converged Storage Interoperability MatrixMartenMattisenNo ratings yet
- Kunft MoldDigitaisDocument80 pagesKunft MoldDigitaisRaquel Dos Santos100% (1)
- ZEN 3.2 (Blue Edition) - Installation Guide PDFDocument36 pagesZEN 3.2 (Blue Edition) - Installation Guide PDFNacho Delgado FerreiroNo ratings yet
- Whatsup GoldDocument72 pagesWhatsup GoldDanny VegaNo ratings yet
- Trắc Nghiệm Big dataDocument69 pagesTrắc Nghiệm Big dataMinhNo ratings yet
- 7 Ways To Optimize JenkinsDocument15 pages7 Ways To Optimize JenkinsAgung PrasetyoNo ratings yet
- Big Data Analytics NotessDocument69 pagesBig Data Analytics NotessmydhiliNo ratings yet
- Danish Jamil ResumeDocument3 pagesDanish Jamil ResumeShowPieceNo ratings yet
- MAX32625-MAX32626 DatasheetDocument28 pagesMAX32625-MAX32626 DatasheetSteve CooperNo ratings yet
- LaptopDocument1 pageLaptopjatinderkaur120361No ratings yet
- Centralizable Traffic Controller: General Characteristics Main FunctionsDocument3 pagesCentralizable Traffic Controller: General Characteristics Main FunctionsjackyNo ratings yet
- AZ 900 Questions - Part 8Document6 pagesAZ 900 Questions - Part 8Nguyen Tuan AnhNo ratings yet
- Versalink B400 B405 NVM ValuesDocument423 pagesVersalink B400 B405 NVM ValuesAndres Perez100% (1)
- 132 Tech-Tips From Computer Geeks - Com R20071221ADocument499 pages132 Tech-Tips From Computer Geeks - Com R20071221Adloadguy100% (5)
- .AMD FP6 Motherboard Design GuideDocument316 pages.AMD FP6 Motherboard Design Guidejayixi4827100% (2)
- Basic Troublshooting Brocade SAN SwitchDocument12 pagesBasic Troublshooting Brocade SAN SwitchPurni Shanti100% (1)
- DAS Software and Hardware RequirementsDocument9 pagesDAS Software and Hardware RequirementsStefanNo ratings yet
- (ODIN) Installing 2.2 Froyo DDJP2 On Samsung Galaxy 3Document23 pages(ODIN) Installing 2.2 Froyo DDJP2 On Samsung Galaxy 3Bhagirat DasNo ratings yet
- 231 Concepts GuideDocument34 pages231 Concepts GuidessvrNo ratings yet
- Phstat2 Version 2.8.1 ReadmeDocument5 pagesPhstat2 Version 2.8.1 ReadmeAi KokoneNo ratings yet
- Script SharpDocument62 pagesScript Sharpwebpro_xNo ratings yet
- Task Performance OSDocument4 pagesTask Performance OSSi gab po ito hahaNo ratings yet
- Crash 2023 06 14 - 18.03.47 FMLDocument8 pagesCrash 2023 06 14 - 18.03.47 FMLEspeciales ???No ratings yet
- SM A225fDocument32 pagesSM A225fjose gonzalo gonzalez chavezNo ratings yet
- Wolfdale1333-D667 R2.0Document42 pagesWolfdale1333-D667 R2.0alvarcNo ratings yet