You might also like
- UHF Surface Dynamics Parameters Radar Design and ExperimentDocument3 pagesUHF Surface Dynamics Parameters Radar Design and ExperimentmenguemengueNo ratings yet
- 4G Wireless SDR OFDMDocument6 pages4G Wireless SDR OFDMhariharankalyanNo ratings yet
- AO Proximity Security SystemDocument31 pagesAO Proximity Security SystemSana UllahNo ratings yet
- Bandwidth Efficient Turbo Coding For High Speed Mobile Satellite CommunicationsDocument8 pagesBandwidth Efficient Turbo Coding For High Speed Mobile Satellite CommunicationsThanhha NguyenNo ratings yet
- DTMF 2Document8 pagesDTMF 2Prathamesh KesarkarNo ratings yet
- Embedded Radar SignalprocessingDocument3 pagesEmbedded Radar SignalprocessingManikantaReddyNo ratings yet
- Acoustic Source Localization Based On Time-Delay Estimation MethodDocument5 pagesAcoustic Source Localization Based On Time-Delay Estimation Methodscribd1235207No ratings yet
- Group Report Arduino Radar ShieldDocument12 pagesGroup Report Arduino Radar ShieldMustafa PehlivanNo ratings yet
- Simulation of Uhf-Rfid Wireless Repeater Using MatlabDocument9 pagesSimulation of Uhf-Rfid Wireless Repeater Using MatlabMaxuell SmashNo ratings yet
- UltraMouse 3DDocument10 pagesUltraMouse 3DaravindwinNo ratings yet
- Mitigating Interference To Maximize Spectral Effi Ciency in 3G/4G NetworksDocument5 pagesMitigating Interference To Maximize Spectral Effi Ciency in 3G/4G NetworksVikram FernandezNo ratings yet
- 2 Meter SDRDocument9 pages2 Meter SDRusaitc100% (1)
- The Origins of Satellite Communication Can Be Traced Back To An Article Written by MRDocument8 pagesThe Origins of Satellite Communication Can Be Traced Back To An Article Written by MRSAKETSHOURAVNo ratings yet
- The Development of The Digital Oscilloscope Based On FPGA PDFDocument8 pagesThe Development of The Digital Oscilloscope Based On FPGA PDFivy_publisherNo ratings yet
- 100 Gb/s CFP Coherent Transceiver Enabled by Power-Optimized DSPDocument3 pages100 Gb/s CFP Coherent Transceiver Enabled by Power-Optimized DSPmofiwNo ratings yet
- Remote Control of Electrical Appliances Using GSM Networks: Abah O. Sunday Visa M. Ibrahim Abah JoshuaDocument8 pagesRemote Control of Electrical Appliances Using GSM Networks: Abah O. Sunday Visa M. Ibrahim Abah JoshuaIJERDNo ratings yet
- Tutorial 3: Entering The World of GNU Software RadioDocument5 pagesTutorial 3: Entering The World of GNU Software RadioNahum SetuNo ratings yet
- ReportDocument42 pagesReportShakiraNo ratings yet
- A DSP Implementation of OFDM Acoustic ModemDocument4 pagesA DSP Implementation of OFDM Acoustic ModemrettyrajaNo ratings yet
- RADAR Signal Data Acquisition, Conditioning & Processing System Technical ProposalDocument27 pagesRADAR Signal Data Acquisition, Conditioning & Processing System Technical ProposalNataraju GandlaNo ratings yet
- Multi-Channel Digital Up/Down Converter For Wimax Systems: FeaturesDocument13 pagesMulti-Channel Digital Up/Down Converter For Wimax Systems: FeaturesAmandeep GroverNo ratings yet
- 2P8 0899-2Document4 pages2P8 0899-2Asim MazinNo ratings yet
- Digital radio frequency memory (DRFM) techniques and applicationsDocument7 pagesDigital radio frequency memory (DRFM) techniques and applicationsAjinkya Kale100% (1)
- Dequevedo 2018Document10 pagesDequevedo 2018Tushar ShettyNo ratings yet
- Range-Doppler Image Processing in Linear FMCW Radar and FPGA Based Real-Time ImplementationDocument5 pagesRange-Doppler Image Processing in Linear FMCW Radar and FPGA Based Real-Time ImplementationMarioSzerNo ratings yet
- ASIC IMPLEMENTATION OF DIGITAL BASEBAND PROCESSORDocument10 pagesASIC IMPLEMENTATION OF DIGITAL BASEBAND PROCESSORSuribabuIppiliNo ratings yet
- Smart Traffic Control: Divyabharathi.S, Logapriya.V, Karthick.RDocument6 pagesSmart Traffic Control: Divyabharathi.S, Logapriya.V, Karthick.RLogapriya ViswanathanNo ratings yet
- DSP-Based BPSK Demodulator DesignDocument7 pagesDSP-Based BPSK Demodulator DesignsantoshrpsNo ratings yet
- Vehicle Speed Control Using R.F. Technology: 1 Project Report OnDocument57 pagesVehicle Speed Control Using R.F. Technology: 1 Project Report OnAvinash RanjanNo ratings yet
- Philips RF Manual 3rd Ed AppendixDocument66 pagesPhilips RF Manual 3rd Ed Appendixzef1100% (1)
- 41 Mobile100 TechnicalDocument107 pages41 Mobile100 TechnicalCauVong JustinNo ratings yet
- RAKE Receiver: Wireless Information Transmission System LabDocument62 pagesRAKE Receiver: Wireless Information Transmission System Labmitso123No ratings yet
- Design of Digital TV Receive System Based On DVB-TDocument4 pagesDesign of Digital TV Receive System Based On DVB-Tdesconoc9No ratings yet
- FPGA-Based Digital Front-End Transmitter Design for OFDM Wireless LAN SystemsDocument4 pagesFPGA-Based Digital Front-End Transmitter Design for OFDM Wireless LAN SystemsMd.Maruf Ahamed BeddutNo ratings yet
- Highly Integrated S Band Transmitter For Pico and Nano SatellitesDocument4 pagesHighly Integrated S Band Transmitter For Pico and Nano SatellitesFUUUUNo ratings yet
- 04 Ie437Document10 pages04 Ie437VijendraSinghTomarNo ratings yet
- Ffh-Cdma Implementation Using Fpga and DDS: Anael SAM, Vladimír ŠTOFANIK, Igor BALÁŽDocument4 pagesFfh-Cdma Implementation Using Fpga and DDS: Anael SAM, Vladimír ŠTOFANIK, Igor BALÁŽjosinio5No ratings yet
- I. Planning Background of The StudyDocument13 pagesI. Planning Background of The StudyNiña Rica PunzalanNo ratings yet
- Paper Presentation On Detection by RADAR byDocument4 pagesPaper Presentation On Detection by RADAR byJanmayjay SwetankNo ratings yet
- Exploring GNU RadioDocument10 pagesExploring GNU RadioSudharssun Subramanian0% (1)
- An Algorithm For The Interception and Analysis of Pulse Compression Radar Signals by Digital ReceiverDocument5 pagesAn Algorithm For The Interception and Analysis of Pulse Compression Radar Signals by Digital ReceiverBOUGHAMBOUZ AbdenacerNo ratings yet
- Software-Defined-Radio: National University of Science and TechnologyDocument19 pagesSoftware-Defined-Radio: National University of Science and TechnologyZain ShabbirNo ratings yet
- Isscc 2019 1Document3 pagesIsscc 2019 1Zyad IskandarNo ratings yet
- Ultra Wideband Spectrum Sensing For Cognitive Electronic Warfare ApplicationsDocument6 pagesUltra Wideband Spectrum Sensing For Cognitive Electronic Warfare ApplicationsigfvalimNo ratings yet
- Researchpaper OFDM Modulator For Wireless LAN WLAN StandardDocument5 pagesResearchpaper OFDM Modulator For Wireless LAN WLAN Standardtsk4b7No ratings yet
- FPGA-based AM/FM Software Radio ReceiverDocument11 pagesFPGA-based AM/FM Software Radio ReceiverphamcaodaiNo ratings yet
- Final Project Report E3390 Electronic Circuits Design Lab RFID Access Control SystemDocument28 pagesFinal Project Report E3390 Electronic Circuits Design Lab RFID Access Control Systemshanx77No ratings yet
- The Next Generation Challenge For Software Defined RadioDocument12 pagesThe Next Generation Challenge For Software Defined Radiomdzakir_hussainNo ratings yet
- Implementation of OFDM Transmitter and Receiver Using FPGA: Nasreen Mev, Brig. R.M. KhaireDocument4 pagesImplementation of OFDM Transmitter and Receiver Using FPGA: Nasreen Mev, Brig. R.M. Khaireankita6298No ratings yet
- II IP Core PSK DemodulatorDocument5 pagesII IP Core PSK DemodulatorfvseverNo ratings yet
- Implementing Cognitive Radio for Efficient RF CommunicationDocument8 pagesImplementing Cognitive Radio for Efficient RF CommunicationinfydiptiNo ratings yet
- 24 GHZ FMCW RadarDocument4 pages24 GHZ FMCW RadarLê Đình TiếnNo ratings yet
- Fiber_Optics_Communication_EnDocument50 pagesFiber_Optics_Communication_EnMinh Đức Phạm TrầnNo ratings yet
- Lab Sheet: Faculty of Engineering & TechnologyDocument12 pagesLab Sheet: Faculty of Engineering & TechnologyMun Kit ChokNo ratings yet
- Design and Realization of A 2.45 GHZ Transmitter and Receiver As A Modular Unit For A Mimo SDRDocument5 pagesDesign and Realization of A 2.45 GHZ Transmitter and Receiver As A Modular Unit For A Mimo SDRdgfghfhygfhjNo ratings yet
- ShjaDocument7 pagesShjaFebri DalimuntheNo ratings yet
- 2007 - Mixdes07Document5 pages2007 - Mixdes07Animesh GhoshNo ratings yet
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDFrom EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDNo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- Digital Signal Processing: Instant AccessFrom EverandDigital Signal Processing: Instant AccessRating: 3.5 out of 5 stars3.5/5 (2)
- MM Wave Radarfor ParkingDocument1 pageMM Wave Radarfor ParkingYingquan LiNo ratings yet
- KAUST ECE 242 Digital Communications and Coding Final ExamDocument4 pagesKAUST ECE 242 Digital Communications and Coding Final ExamYingquan LiNo ratings yet
- Student Payment and Deduction Statement: Name ProgramDocument1 pageStudent Payment and Deduction Statement: Name ProgramYingquan LiNo ratings yet
- Pulse Amplitude Modulated (PAM) SignalsDocument10 pagesPulse Amplitude Modulated (PAM) SignalsYingquan LiNo ratings yet
- Exam Cover Page174931Document1 pageExam Cover Page174931Yingquan LiNo ratings yet
- Jntuworld: R05 Set No. 2Document4 pagesJntuworld: R05 Set No. 2vanamgouthamNo ratings yet
- ODROID Magazine Build Your Own AndroidDocument39 pagesODROID Magazine Build Your Own AndroidAlex LeitnerNo ratings yet
- En - HDL10-A Spec Sheet PDFDocument4 pagesEn - HDL10-A Spec Sheet PDFTELNEX SASNo ratings yet
- Annual Procrement PLanDocument42 pagesAnnual Procrement PLanMhelody Gutierrez BelmonteNo ratings yet
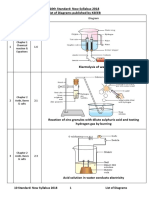
- 10 Science List of Diagrams KSEEB 2018Document11 pages10 Science List of Diagrams KSEEB 2018Prathibha Eshwaraiah100% (4)
- Transducers: An IntroductionDocument61 pagesTransducers: An IntroductionHari Narayanan ACNo ratings yet
- Avr AnillosDocument4 pagesAvr AnillosEduardo VicoNo ratings yet
- User Guide Guide de L'utilisateur: English FrançaisDocument177 pagesUser Guide Guide de L'utilisateur: English Français陳建華No ratings yet
- FURONO NavNet Vx2 BrochureDocument10 pagesFURONO NavNet Vx2 BrochureTaufiq Omar HasanNo ratings yet
- Ugc-Net-2019-Electronic Science SyllabusDocument4 pagesUgc-Net-2019-Electronic Science Syllabussasi kiran sNo ratings yet
- Danfoss FC100 Instruction Manual PDFDocument172 pagesDanfoss FC100 Instruction Manual PDFAnonymous AsIbqUNo ratings yet
- NTU EEE Brochure 2020Document7 pagesNTU EEE Brochure 2020AllalannNo ratings yet
- PDF Mtek Jal11 Series 1 3kva pf09 - CompressDocument2 pagesPDF Mtek Jal11 Series 1 3kva pf09 - CompressIng. Kevin D Pérez Eguis.No ratings yet
- 23 Vidiyal-Mar11 PDFDocument20 pages23 Vidiyal-Mar11 PDFmicroteksaroNo ratings yet
- ES 442 Homework #2: SolutionsDocument7 pagesES 442 Homework #2: SolutionsTalha Riaz100% (1)
- Radiocomunicaciones AeronauticasDocument5 pagesRadiocomunicaciones AeronauticaspoketupiNo ratings yet
- Cadence Online Documentation TutorialDocument12 pagesCadence Online Documentation Tutorialvijaymaloth4No ratings yet
- HSC PHYSICS NOTES Collins Module 4Document9 pagesHSC PHYSICS NOTES Collins Module 4AbdullaNo ratings yet
- MCQ in Industrial Electronics Part 1: Choose The Letter of The Best Answer in Each QuestionsDocument37 pagesMCQ in Industrial Electronics Part 1: Choose The Letter of The Best Answer in Each QuestionsAisha Zaleha LatipNo ratings yet
- BSIM4 ManualDocument188 pagesBSIM4 ManualAnitha MariappanNo ratings yet
- User Manual Genisis 5.5-15 KWDocument91 pagesUser Manual Genisis 5.5-15 KWGerry Mc Mahon67% (3)
- Instructions: Electronic Unit For BD35F/50F/35K Compressors, 101N0212, 101N0340 and 101N0650, 12/24V DCDocument2 pagesInstructions: Electronic Unit For BD35F/50F/35K Compressors, 101N0212, 101N0340 and 101N0650, 12/24V DCDong NguyenNo ratings yet
- Marine SSB Frequencies PDFDocument3 pagesMarine SSB Frequencies PDFJoão Miguel100% (1)
- DS1300-3 Series PDFDocument4 pagesDS1300-3 Series PDFdoraemon007No ratings yet
- College Engineering Lab Builds Theft Alarm Proximity SensorDocument10 pagesCollege Engineering Lab Builds Theft Alarm Proximity Sensordebasish behera100% (1)
- Eric Black PDH TutorialDocument9 pagesEric Black PDH TutorialliuleeNo ratings yet
- Design Max: 2A DC power supply input boardDocument16 pagesDesign Max: 2A DC power supply input boardyhyzhjNo ratings yet
- Data Sheet: Directional Control Valves - Size 10Document4 pagesData Sheet: Directional Control Valves - Size 10Patricio Maldonado AlvarezNo ratings yet
- Herma 400 Ba GB 315150708book BWDocument106 pagesHerma 400 Ba GB 315150708book BWMika Suominen100% (1)
- D6TDocument6 pagesD6Tllesli1750% (2)