Professional Documents
Culture Documents
Grafcet
Grafcet
Uploaded by
Carlos Prudecio de GraciaCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Grafcet
Grafcet
Uploaded by
Carlos Prudecio de GraciaCopyright:
Available Formats
INS LLOBREGAT Departament Elèctric
L’Hospitalet de Llobregat
CFGS: Sistemes electrotècnics i automatitzats
GRAFCET
S1. FC_A_NO
1 KM1
FC_B_NC
FC_B_NO
3 KM2
FC_A_NC
Mòdul 2 - Mòdul 4 - UF2 Autòmats programables
Curs 2013 – 2014
ÍNDEX
1.- Introducció............................................................................................. Pàg. 3
2.- Elements gràfics del Grafcet ................................................................. Pàg. 4
2.1.- Etapes ........................................................................................... Pàg. 4
2.2.- Accions.......................................................................................... Pàg. 5
2.3.- Transició i condició de transició .................................................... Pàg. 7
2.4.- Unions orientables....................................................................... Pàg. 10
2.5.- Els reenviaments ......................................................................... Pàg. 11
3.- Nivells de representació del Grafcet .................................................. Pàg. 11
4.- Regles de sintaxi i d’evolució .............................................................. Pàg. 13
5.- Estructures bàsiques ........................................................................... Pàg. 18
5.1.- Seqüència única .......................................................................... Pàg. 18
5.2.- Estructura d’accions paral·leles .................................................. Pàg. 19
5.3.- Estructura de divergència en “o” ................................................. Pàg. 19
5.4.- Estructura de divergència en “i” .................................................. Pàg. 20
5.5.- Estructura de convergència en “o” .............................................. Pàg. 21
5.6.- Estructura de convergència en “i” ............................................... Pàg. 21
5.7.- Estructura de salts endavant i endarrere..................................... Pag. 22
6.- Subrutines .......................................................................................... Pàg. 23
7.- Macroetapes ...................................................................................... Pàg. 24
8.- Bibliografia ......................................................................................... Pàg. 26
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
GRAFCET
1. Introducció
El GRAFCET (GRAphe Fonctionnel de Commande Etapes-Transitions, Gràfic
funcional de control d’etapes i transicions) va sorgir a França a mitjans del
1970, degut a col·laboració entre alguns fabricants d’autòmats programables com
Telemecanique i Aper juntament amb dos organismes oficials AFCET (Associació
Francesa per la Cibernètica, Economia i Tècnica) i ADEPA (Agència Nacional per
al desenvolupament de la producció Automatitzada).
Està homologada a França (NFC), alemanya (DIN), i posteriorment per la
Comissió Electrotècnia Internacional (norma IEC 848, any 1988). També
ratificada per Aenor l’any 2002 per la norma EN 60848.
Actualment és una eina imprescindible en quan es tracta d’automatitzar
processos seqüencials de certa complexitat.
El GRAFCET és un diagrama funcional que descriu l’evolució del procés que es
pretén automatitzar, indicant les accions que hi ha que fer sobre el procés i les
informacions que les provoquen; partint d’ell es pot obtenir les seqüències que
ha de fer l’autòmat programable. La seva utilització per resoldre tasques
d’automatització facilita el diàleg entre persones amb nivells de formació tècnica
diferent, tant en el moment de l’anàlisi del procés a automatitzar, com
posteriorment en el manteniment i reparació d’avaries.
Aquest diagrama imposa un funcionament rigorós, evitant d’aquesta forma
incoherències, bloquejos o conflictes de funcionament.
Definició: és una seqüència d’etapes que tenen associades unes determinades
accions a realitzar sobre el procés, junt amb les condicions o transicions que
provoquen que produeixi el pas d’una etapa a una altra.
GS Sistemes Electrotècnics i Automat. 3 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
2. Elements gràfics del Grafcet
Etapa inicial 0
Receptivitat
Transició Polsador i a baix
Acció
Etapa 1 Pujar
A dalt
Baixa
2
A baix
2.1. Etapes
Les etapes representen a cada un dels estats del sistema. Cada etapa pot estar
associada a una o vàries accions.
ETAPA
ETAPA
INICIAL
El símbol emprat per representar una etapa és un
quadrat amb un número, el qual indica l’ordre que
ocupa dintre del gràfic, no l’ordre d’execució.
0 1
Es denominen etapes inicials aquelles en què es
posiciona el sistema al iniciar-se el procés per
primera vegada. Les etapes inicials es
GS Sistemes Electrotècnics i Automat. 4 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
representen per un quadrat amb doble línia.
Una etapa pot estar ACTIVA o INACTIVA. En un moment donat la situació de
l’automatisme ve donat pel conjunt d’etapes actives.
És usual representar l’etapa activa en un moment donat, amb un punt a l’interior
del quadrat, representatiu de l’etapa.
2.2. Accions
Les accions que porten associades les etapes es representen amb un rectangle
on s’indica el tipus d’acció a fer, quan l’etapa estigui activada. Aquests rectangles
estan connectats a l’etapa i situats a la dreta d’ella. A l’interior d’aquest rectangles
s’indica, bé de forma literal, bé de forma simbòlica, les accions a realitzar.
Una etapa pot tenir vàries accions associades.
GS Sistemes Electrotècnics i Automat. 5 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
En una primera classificació es poden dividir les accions en dos tipus:
• Incondicionals: accions que s’executen quan tan sols quedi activada
l’etapa corresponent.
• Condicionals: son les accions que necessiten el compliment d’una condició
a més de la pròpia activació de l’etapa corresponent. Perquè una acció
condicional sigui efectiva, és necessari que l’etapa considerada estigui
activada i que la condició sigui verificada.
t < 22 ºC
En aquest exemple podem veure que l’acció
4 Calefacció d’activar calefacció, és condicional, ja que
necessita que la temperatura sigui inferior a 22
ºC a més d’estar activa l’etapa 4.
t = 22 ºC
Es pot escriure de dos formes diferents:
També es poden classificar les accions en:
• Internes: accions que es produeixen en l’equip, per exemple,
temporitzacions, comptadors, càlculs matemàtics, etc.
• Externes: les accions que es produeixen sobre el procés, per exemple obrir
o tancar una vàlvula, activar o desactivar un motor, etc.
GS Sistemes Electrotècnics i Automat. 6 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
2.3. Transició i condició de transició
Un procés seqüencial es caracteritza perquè una acció determinada es fa en
funció del resultat de l’acció anterior.
El procés del GRAFCET es descomposa en una sèrie d’etapes que són activades
una darrera l’altra. Per tant, haurà d’haver una condició que s’ha de complir per
passar d’una a una altra etapa. Aquesta condició se l’anomena transició i es
representa així:
Tota transició porta associada una condició de transició (anomenada receptivitat).
Les condicions de transició poden ser una o vàries variables de les que
intervenen en el procés.
Es diu que la transició està validada, quan l’etapa o etapes anteriors a la transició
estan activades. El franqueig de la transició es produirà tant sols si la transició
està validada i la receptivitat es verdadera.
A continuació es donen alguns exemples:
4 Condició activa
FC2NC En l’exemple de l’esquerra podem veure que l’activació de l’etapa 5
es produirà quan el final de cursa 2 estigui activat. Sempre i quan
5 l’etapa 4 estigui activada.
GS Sistemes Electrotècnics i Automat. 7 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
Condició inactiva
En l’exemple de la dreta podem veure que l’activació de l’etapa 5 es 4
produirà quan el final de cursa 2 estigui inactiu. Sempre i quan l’etapa 4
FC2NC
estigui activada.
Condició per temps
4 Si el traspàs d’una etapa a una altra es fa passat un temps d’estar
activada la primera, utilitzarem un temporitzador en la transició. El
T3/10s temporitzador s’activarà, amb l’etapa d’entrada, i passat un temps
activarà l’etapa de sortida desactivant la d’entrada.
5
En l’exemple quan estigui activada l’etapa 4 s’activarà el
temporitzador 3 i als 10 segons s’activarà l’etapa 5.
4
Motor1 T 3 /10s
T3
També podem representar l’activació d’un
temporitzador dins d’una acció associada.
5
Condició per comptadors
Un comptador, es col·loca en la transició d’una etapa a una altra. 4
L’activarà l’etapa d’entrada, i desprès de rebre “n” senyals
d’impulsos, activarà l’etapa de sortida i desactivarà l’etapa C 3 /10
d’entrada.
5
GS Sistemes Electrotècnics i Automat. 8 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
També podem representar l’activació d’un comptador dintre d’una acció
associada, tal i com hem vist amb els temporitzadors.
4 Condició per transició Booleana
(P1*FC2NC)+t3/10s
En una transició podem tenir una condició simple:
5 • Polsar un polsador, activació d’un temporitzador, etc...
• O bé una funció o expressió booleana de varies condicions.
Receptivitats condicionats per flancs
a A vegades pot ser necessari tenir en
compte el canvi d’estat d’una variable i
no l’estat real. Això vol dir treballar per
flancs.
1
El contacte pot adoptar dos estats
0
estables, però quan es produeix un canvi
Flanc Flanc d’estat, apareix un estat transitori.
ascendent descendent
Hi ha dos estats transitoris possibles:
1 1
a a • El pas de l’estat lògic 0 a l’estat
lògic 1 (flanc ascendent).
2 2 • El pas de l’estat lògic 1 a l’estat
lògic 0 (flanc descendent).
GS Sistemes Electrotècnics i Automat. 9 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
2.4. Unions orientables
Les unions orientables són les línies que enllacen les etapes amb les transicions,
i per tant senyalen el camí de l’evolució.
Per convenció les unions es faran horitzontals o verticals.
El sentit general del recorregut és de dalt a baix. L’arribada i la sortida en una
etapa és representarà verticalment, estant l’arribada a la part superior, i la sortida
a la inferior.
Per evitar ambigüitats es preferible evitar els encreuaments de les línies d’unió.
Utilitzarem una sageta quan:
• No es respecti la convenció (de dalt a baix).
• Si excepcionalment, s’ha d’arribar per la part inferior una sageta indicarà el
sentit de lectura.
Sageta indicant sentit de
baix a dalt
Unions orientables
GS Sistemes Electrotècnics i Automat. 10 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
2.5. Els reenviaments
Quan el GRAFCET que fem excedeix de la superfície d’un full, i conseqüentment
hem d’utilitzar més, en els enllaços orientats del final del full haurem de posar a
on van (l’etapa següent) del proper full. I a l’inrevés en el full següent.
3. Nivells de representació del Grafcet
El Grafcet es pot utilitzar per descriure tres nivells d’especificacions d’un
automatisme. Aquests tres nivells són els que habitualment s’utilitzen per
dissenyar i descriure un automatisme.
Grafcet de Nivell 1 – Descripció funcional
En el primer nivell interessa una descripció global (normalment poc detallada de
l’automatisme que permeti comprendre ràpidament la seva funció.
GS Sistemes Electrotècnics i Automat. 11 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
0
Aquest Grafcet no ha de contenir cap referència a
la tecnologia utilitzada; es a dir no s’especifica
Polsador i a baix
com farem avançar una peça per exemple (
cilindre neumàtic, motor, etc...), ni com detallem
1 Pujar la seva posició (final de carrera, detectors, etc..)
ni tan sols el tipus d’automatisme utilitzat ( PLC,
automatisme neumàtic, etc...).
A dalt
Baixa
2
A baix
Nivell 1
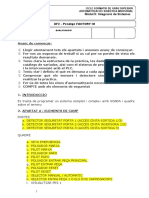
Grafcet de Nivell 2 – Descripció Tecnològica
0
En aquest nivell es fa una descripció a nivell tecnològic i
operatiu de l’automatisme. Quedaran perfectament
S1. FC1NO definides les diferents tecnologies utilitzades per a cada
funció. El Grafcet descriu les feines a realitzar per els
1 KM1 elements escollits. En aquest nivell completem
l’estructura de la màquina i ens falta l’automatisme que
FC2NC el controla.
KM2
2
FC1NC
Nivell 2
GS Sistemes Electrotècnics i Automat. 12 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
Grafcet de Nivell 3 – Descripció Operativa
I0.0 . I0.1 En aquest nivell s’implementa l’automatisme. El
Grafcet definirà la seqüència d’actuacions que
1 Q0.0 realitzarà aquest. En el cas de realitzar la
implementació per exemple en una automatisme
I0.2 programat, definirà la seva evolució i l’activació de
les sortides en funció de l’evolució de les entrades.
Q0.1
2
I0.3
Nivell 3
4. Regles de sintaxi i d’evolució
m
Un GRAFCET està correctament traçat si:
1
• Respecta la regla d’alternança etapa-transició i transició-
etapa.
2 Per tant:
• Dos etapes no poden unir-se directament, hauran d’estar
n
separades per una transició.
1
• No poden haver dos transicions consecutives, hauran
d’estar separades per una etapa.
m
GS Sistemes Electrotècnics i Automat. 13 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
Regla 1. Relativa a la situació inicial
L’etapa inicial d’un GRAFCET s’activa de forma incondicional. Aquesta situació
inicial es correspon en general amb una situació de repòs.
La situació inicial d’un GRAFCET caracteritza tant al comportament inicial del
sistema (elements d’acció) com als de control (automatisme). Correspon a l’estat
en el qual s’ha de trobar el sistema al posar en marxa, al connectar l’alimentació,
etc.
Habitualment la situació inicial d’un GRAFCET correspon a una situació de repòs
o d’aturada segura.
Sovint en la posada en marxa d’una màquina, el control comença per comprovar
si aquesta es troba en la situació inicial adequada per al funcionament. Si no és
així (per exemple per que l’aturada ha estat d’emergència o causada per un tall
de l’alimentació) es deurà portar al sistema a la situació inicial adequada abans
de passar al funcionament desitjat de l’automatisme.
Regla 2. Relativa al franqueig d’una transició
• Una transició esta en disposició de ser validada quan totes les etapes
immediatament precedents, unides a aquesta transició, estiguin activades.
• L’activació (franqueig) d’una transició es produeix quan està validada i la
condició de transició o receptivitat és verdadera.
• Tota transició franquejada ha de ser obligatòriament i immediatament
franquejada.
Les figures representen una part d’un
GRAFCET en un moment determinat.
1 1
En aquest instant l’etapa 1 no està
activa, la qual cosa fa que la transició
m=0 m=1 no estigui validada, independentment
de si la receptivitat és certa o no.
2 2 En la figura (a) la receptivitat de la
condició de transició és 0, i en la (b)
(a) (b)
aquesta és 1.
GS Sistemes Electrotècnics i Automat. 14 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
1 Ara l’etapa 1 està activa, la qual cosa implica que la transició
esta validada. El sistema es mantindrà estable en aquesta
situació mentre la receptivitat m sigui falsa (m=0).
m=0
En la següent situació l’etapa 1 està activa, la qual cosa implica
1 que la transició esta validada. Donat que la receptivitat m és
certa (a=1), la transició es franquejable i, per tant, ha de ser
m=1 obligatòriament franquejada. Això implica que la situació
representada és una situació que no pot existir mai, ja que el
2 franqueig de la transició ha de ser immediat a l’activació de m.
Com a conseqüència de la figura anterior, el sistema ha
m evolucionat franquejant la transició. Al franquejar la transició,
l’etapa 1 ha estat desactivada i l’etapa 2 ha estat activada.
2
Regla 3. Relativa a l’evolució de la situació
Franquejar una transició implica l’activació de totes les etapes immediatament
posteriors, i la desactivació de totes les immediates precedents. (evolució
síncrona).
GS Sistemes Electrotècnics i Automat. 15 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
3 Aquest exemple representa una part d’un
6
GRAFCET en un instant determinat. En
aquest instant l’etapa 3 està activa i l’etapa
6 no està activa, la qual cosa fa que la
fc1 transició no estigui validada,
independentment de si la receptivitat es
7 certa o no.
3 6 Ara podem veure que tant l’etapa
3, com l’etapa 6 estan actives,
per tant implica que la transició
esta validada. Però la receptivitat
fc1 =0
és falsa (fc1 =0). Quan aquesta
sigui certa passarà el que podem
7
veure en el següent exemple, en
el qual estan desactivades les
etapes 3 i 6 i activada l’etapa 7,
3 6
per tant el GRAFCET ha
evolucionat.
fc1=1
GS Sistemes Electrotècnics i Automat. 16 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
Regla 4. Relativa a les evolucions simultànies
Vàries transicions simultàniament franquejables són simultàniament franquejades.
En aquest cas quan les etapes 3 i 4 estiguin activades validarà la transició. Una
vegada la receptivitat sigui certa (fc1=1), s’activaran les etapes 5 i 6 desactivant
aquestes les dues anteriors.
Regla 5. Relativa a l’activació i desactivació simultània d’una mateixa etapa
Si en el decurs d’una evolució, una mateixa etapa es troba a la vegada activada i
desactivada, romandrà activada.
Es podria definir una etapa com activable quan la transició precedent està
validada.
A l’exemple de la figura de la següent pàgina a l’esquerra, si la receptivitat b es
certa, hi ha que tornar a l’etapa 2. En aquest cas, es deurà desactivar i activar
l’etapa 2 simultàniament. Per tant haurà de quedar activada ja que al
GRAFCET sempre s’ha de tenir com a mínim una etapa activa. Això es pot
solucionar dissenyant un circuit més adient, com podem veure en la figura de la
dreta.
GS Sistemes Electrotècnics i Automat. 17 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
1
1
p p
2
b 2
a a.b
3
3
5. Estructures bàsiques
5.1. Seqüència única
Direm que és seqüència única quan en el diagrama hi ha només una sola branca,
el conjunt de les etapes seran activades una darrera l’altra, després de verificar-
se la transició que les separa. Poden haver de dos tipus:
GS Sistemes Electrotècnics i Automat. 18 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
5.2. Estructura d’accions paral·leles
La estructura d’accions paral·leles és aquella que respon a una situació de “o”
lògica; Si es pren, per exemple i tal com proposa la següent figura, dues accions
paral·leles, la implementació és tal com es descriu a la mateixa figura, en
paral·lel. Atenció a les causes de desactivació de l’etapa 3, (M3.3), es deuen a la
acció de M3.4 i/o M3.5: l’un o l’altre o tots dos.
M3.2 C3 M3.3
C3 NW1 (S)
1
3 P
I0.1
M3.3
NW2 (R)
1
M3.4
M3.5
C4 C5
M3.3 C4
4 5 NW3
M3.4
(S)
1
C6 C7 M3.6 M3.4
NW4 (R)
6 7 P 1
I0.1
M3.3 C5 M3.5
NW5 (S)
1
M3.5
M3.7
NW6 (R)
1
P
I0.1
5.3. Estructura de divergència en “o”
L’estructura d’accions divergents en “o” responen, de fet, a una situació de “o-
exclussiva” lògica (recordeu la doble barra!); si es prenen, per exemple i tal com
proposa a la següent figura, dues accions divergents en “o”, la implementació és
tal com es descriu a la mateixa figura, en exclusivitat. Atenció a les causes de
desactivació de l’etapa 3, M3.3; es deuen a la acció de M3.4 o M3.5: l’un o l’altre.
GS Sistemes Electrotècnics i Automat. 19 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
M3.2 C3 M3.3
C3 NW1 (S)
1
P
3 NW2
I0.1
M3.3
(R)
1
M3.4
M3.5
C4 C5
M3.3 C4 C5 M3.4
4 5 NW3 (S)
1
C6 C7 M3.6 M3.4
NW4 (R)
6 7 P
I0.1
1
M3.3 C5 C4 M3.5
NW5 (S)
1
M3.5
M3.7
NW6 (R)
1
P
I0.1
5.4. Estructura de divergència en “i”
L’estructura d’accions divergents en “i” responen a una situació de “i” lògica; Si es
pren, per exemple i tal com proposa a la següent figura, dues accions divergents
en “i”, la implementació és tal com es descriu a la mateixa figura, en paral·lel.
Atenció a les causes de desactivació de la etapa 3, M3.3; es deuen a la acció de
M3.4 i M3.5: l’un i l’altre.
M3.2 C3 M3.3
NW1 (S)
C3 1
P M3.3
I0.1
NW2 (R)
3 1
M3.4 M3.5
C45
M3.3 C45 M3.4
NW3 (S)
1
4 5 M3.6 M3.4
(R)
NW4
P 1
C6 C7 I0.1
6 7 M3.3 C45 M3.5
NW5 (S)
1
M3.5
M3.7
NW6 (R)
1
P
I0.1
GS Sistemes Electrotècnics i Automat. 20 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
5.5. Estructura de convergència en “o”
L’estructura d’accions convergents en “o” responen a una situació de “o-
exclusiva” lògica (recordeu la doble barra!); si es pren, per exemple i tal com
proposa a la següent figura, dues accions convergents en “o”, la implementació
és tal com es descriu a la mateixa figura, en exclusivitat. Atenció a les causes
d’activació de M3.6; es deuen a l’acció de M3.4 i C6a o M3.5 i C6b: un grup o
l’altre.
M3.x C4 M3.4
NW1 (S)
1
M3.6 M3.4
C4 C5 NW2 (R)
1
P I0.1
4 5
C6a C6b M3.y C5 M3.5
NW3 (S)
1
M3.6 M3.5
NW4 (R)
6 P 1
I0.1
C7
M3.4 C6a M3.6
NW5 (S)
1
M3.5 C6b
M3.7 M3.6
NW6 (R)
1
P
I0.1
5.6. Estructura de convergència en “i”
L’estructura d’accions convergents en “i” responen a una situació de “i” lògica; si
es pren, per exemple i tal com proposa a la següent figura, dues accions
convergents en “i”, la implementació és tal com es descriu a la mateixa figura.
Atenció a les causes d’activació de la etapa 6, M3.6; es deuen a la acció de M3.4
i M3.5: l’un i l’altre.
GS Sistemes Electrotècnics i Automat. 21 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
M3.x C4 M3.4
NW1 (S)
C4 C5 1
M3.6 M3.4
4 5 NW2 (R)
1
P I0.1
M3.y C5 M3.5
C6 NW3 (S)
1
6 M3.6 M3.5
NW4 (R)
C7 P 1
I0.1
M3.4 M3.5 C6 M3.6
NW5 (S)
1
M3.7 M3.6
NW6 (R)
1
P
I0.1
5.7. Estructura de salts endavant i endarrere
L’estructura de salt endavant i la seva implementació és la que es pot veure a la
següent figura.
C2
M3.1 C2 M3.3 C4 M3.4
M3.4 C6 M3.6
M3.2
2 NW1 (S) NW5 (S) NW9 (S)
1 1 1
M3.2 M3.4 M3.5
C3 (R)
M3.6
(R)
NW2 NW6
C5 M3.3
1 1 M3.7
M3.6
NW10 (R)
3 M3.5 M3.2 C5 M3.5 1
NW7 (S)
C4 M3.2 C3 1
M3.3
NW3 (S) M3.6 M3.5
5 4 1 NW8 (R)
1
M3.4 M3.3
NW4 (R)
C6 1
GS Sistemes Electrotècnics i Automat. 22 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
A la següent figura es pot veure un salt endarrere.
C2 M3.1 C2 M3.3 C4 M3.4 M3.4 C6 M3.6
M3.2
2 NW1 (S) NW5 (S) NW9 (S)
1 1 1
M3.2 M3.4
M3.6 M3.6
C3 NW2 (R) (R) M3.7
M3.3 NW6 NW10 (R)
1 1 1
3 M3.2 C3 M3.3
M3.5
NW3 (S)
5 C4
1 M3.4 C5 M3.5
M3.5
C5 4 NW7 (S)
1
M3.4 M3.3
M3.5
C6 NW4 (R) M3.3
(R)
1 NW8
1
6
6. Subrutines
Podem estructurar el nostre problema d’automatització en un diagrama principal i
un conjunt de subrutines.
Una etapa del GRAFCET pot activar una transició d’una altra etapa, executant
així un conjunt d’accions, un cop realitzades podem continuar el GRAFCET
principal.
Una seqüència d’etapes que es repeteix sovint en un GRAFCET, pot ser
representat mitjançant un sol símbol d’etapa amb la numeració adequada,
representant-se d’aquesta forma la reutilització d’una mateixa seqüència.
GS Sistemes Electrotècnics i Automat. 23 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
10
0
X2 + X4
a
11 C+
1 A+
Fc5
Fc1
12 C-
2 X 10
Fc6
X13
13
3 B+
X3+X5
Fc2
4 X 10
X13
5 A- B-
Fc2* Fc4
Tant l’etapa 0 com la 10 son etapes inicials, i per tant estan actives.
Quan entre l’etapa 2 o l’etapa 4 del GRAFCET principal, entra la subrutina. Una
vegada aquesta arriba a l’etapa 13, segueix el GRAFCET principal. A la
subrutina un cop superada la última transició (receptivitat X3+X5), llavors ens
tornem a situar a l’etapa 10 en espera del següent cicle.
7. Macroetapes
La macroetapa és una representació unificada d’un conjunt d’etapes i de
transicions anomenada expansió.
La macroetapa no té existència física i no pot ser assimilada a una etapa, doncs
les regles del GRAFCET no serien respectades.
No es pot associar per tan cap acció a una macroetapa.
GS Sistemes Electrotècnics i Automat. 24 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
Per fer-la seguirem unes senzilles normes:
• L’expansió sempre té una etapa d’entrada i una altra de sortida.
• L’etapa d’entrada és una etapa normal. No pot ser etapa inicial.
• No es pot associar cap acció a l’etapa de sortida.
• La transició desprès de la macroetapa és sempre certa (=1)
En certs automatismes, la realització del GRAFCET pot ser complexa.
Per facilitar la nostra tasca, es divideix el treball en dos parts, i per això és precís
adoptar una forma d’estudi estructurat.
1) Realització d’un GRAFCET principal sense entrar en detalls sobre certes parts
del funcionament (Macroetapes).
2) Tractament separat de les parts a detallar. Realització d’una representació
detallada d’una macroetapa.
Una representació detallada d’una macroetapa és un segment del GRAFCET que
s’executa quan la macrotapa estigui activa.
GS Sistemes Electrotècnics i Automat. 25 de 26 Curs 13-14
Mòdul 2 – Mòdul 4 - UF2 – Autòmats Programables
8. Bibliografia
• CASA, Miquel. Apunts Grafcet. Versió 0. IES Llobregat 2007-2008.
• DOMINGO, Joan. Apunts Automatització Industrial. EUETIB. UPC, 2004.
• GONZALEZ, Vicente M. Apunts Grafcet. ISA. Gener 2006.
• BOIX, Oriol, Apunts Grafcet. 2002.
• Apunts Autòmats programables. ISA-UMH. TDOC 99.
GS Sistemes Electrotècnics i Automat. 26 de 26 Curs 13-14
You might also like
- AutomaticaDocument5 pagesAutomaticaAlexLgNo ratings yet
- Enunciat PAC2 UOC, Fonaments de ProgramacióDocument15 pagesEnunciat PAC2 UOC, Fonaments de ProgramacióMartí Martí GarcíaNo ratings yet
- 1 Guia Gemma I Grafcet Celula FestoDocument13 pages1 Guia Gemma I Grafcet Celula FestoALBERT ROFIN ESTELLESNo ratings yet
- Pre Informe 6Document3 pagesPre Informe 6Vanessa Brand CastañedaNo ratings yet
- P3-Implementació de Cóntróladórs AnalíticsDocument8 pagesP3-Implementació de Cóntróladórs AnalíticsDavid Murillo SánchezNo ratings yet
- Sistemes Automàtics I de ControlDocument20 pagesSistemes Automàtics I de ControlALPHA SOULEYMANE BAH BAHNo ratings yet
- Presentacio Automatismes Al MoodleDocument56 pagesPresentacio Automatismes Al MoodleJavier SuarezNo ratings yet
- Api I C4Document46 pagesApi I C4mihai37No ratings yet
- Introducció Als PLC'sDocument63 pagesIntroducció Als PLC'sIrene PuigNo ratings yet
- Guia de La Practica 6 CIIA V2e - 2Document27 pagesGuia de La Practica 6 CIIA V2e - 2Guillem RiusNo ratings yet
- Apunts UF1 Regulació I Control de SistemesDocument7 pagesApunts UF1 Regulació I Control de SistemesfencaladaenriquezNo ratings yet
- IntroduccioDocument10 pagesIntroducciooriol.ibanez.rodaNo ratings yet
- Examen D'automatització IndustrialDocument21 pagesExamen D'automatització IndustrialFineas GrozaNo ratings yet
- MP06 AutomatizacionDocument5 pagesMP06 Automatizacionalejandro1802.allNo ratings yet
- 06 MonitorsDocument42 pages06 Monitorswilisete8No ratings yet
- UF1-Pp1 PracticaInicialDocument2 pagesUF1-Pp1 PracticaInicialJosep ALCAÑIZ PRATSNo ratings yet
- Guia de La Practica 4 CIIA v3gDocument13 pagesGuia de La Practica 4 CIIA v3gAlan Reyes Rodriguez Reyee RodriguezNo ratings yet
- Lab 1Document21 pagesLab 1JaumeNo ratings yet
- Tecnicas de Control 1Document17 pagesTecnicas de Control 1MartaNo ratings yet
- Control Industrial I AutomatizaciónDocument13 pagesControl Industrial I Automatizaciónmar taNo ratings yet
- Dossier Vir PLCDocument32 pagesDossier Vir PLCdcquintelaNo ratings yet
- Estats Marxa Aturada v2Document13 pagesEstats Marxa Aturada v2Xavier Castelló MartíNo ratings yet
- Semana 1 Instrumentacion Industrial.Document8 pagesSemana 1 Instrumentacion Industrial.Daniel Wilson Cayo UrreloNo ratings yet
- Exercicis AutomatismesDocument7 pagesExercicis AutomatismesAlex AutoconsumamosNo ratings yet
- Curso HCS12Document255 pagesCurso HCS12Angel TrianoNo ratings yet
- Pp4 - Pesatge Factory Io - 2223Document8 pagesPp4 - Pesatge Factory Io - 2223Didac GENo ratings yet
- LL2. Algunes Preguntes Sobre Sistemes de ControlDocument2 pagesLL2. Algunes Preguntes Sobre Sistemes de ControldanieltriassolerNo ratings yet
- Graella Avaluació Informe Laboratori M2 UF3 - Destil LacióDocument1 pageGraella Avaluació Informe Laboratori M2 UF3 - Destil LacióJordi Saumell CorominasNo ratings yet
- Info 3Document4 pagesInfo 3albaboschfreireNo ratings yet
- UF2 NF2 Tema2Document15 pagesUF2 NF2 Tema2Sergio KastNo ratings yet
- 5 Realimentacio 2021Document8 pages5 Realimentacio 2021renata guerreiroNo ratings yet
- PREGUNTES AmpliacióDocument2 pagesPREGUNTES Ampliaciójhonatan.yanceNo ratings yet
- Bpr1.1 - Sistemes Avançats de Control Industrial M6-UF1-provisional PDFDocument17 pagesBpr1.1 - Sistemes Avançats de Control Industrial M6-UF1-provisional PDFOriolNo ratings yet
- Teoria de Sistemes Vol2 v1 PDFDocument74 pagesTeoria de Sistemes Vol2 v1 PDFMartaNo ratings yet
- Trabajo de MantenimientoDocument14 pagesTrabajo de MantenimientospotiNo ratings yet
- Procesamiento Digital - M3Document54 pagesProcesamiento Digital - M3zasplasNo ratings yet
- LadrilloDocument545 pagesLadrilloToni LuqueNo ratings yet
- MP09 UF1 - NF1 (Alumnes)Document44 pagesMP09 UF1 - NF1 (Alumnes)Javi enriquez rubioNo ratings yet
- 1 - GRAFCET v1Document76 pages1 - GRAFCET v1sergiNo ratings yet
- Control Digital de Sistemes Pràctiques de Laboratori Primavera 2022Document3 pagesControl Digital de Sistemes Pràctiques de Laboratori Primavera 2022David Murillo SánchezNo ratings yet
- Enunciat FADocument9 pagesEnunciat FANil Hernández JiménezNo ratings yet
- Guia de La Pràctica 2 CIIA v1fDocument24 pagesGuia de La Pràctica 2 CIIA v1fGuillem RiusNo ratings yet
- Practica Control 2Document4 pagesPractica Control 2Marc Padilla MoralesNo ratings yet
- PRT Calorimetria Determinacio Entalpia Duna Reacció Exotèrmica MULTILOG 2017-18Document6 pagesPRT Calorimetria Determinacio Entalpia Duna Reacció Exotèrmica MULTILOG 2017-18irina.pouNo ratings yet
- 02 - 525 - Sistemes-Electrotecnics-Automatics - Catalunya - 2020-21Document11 pages02 - 525 - Sistemes-Electrotecnics-Automatics - Catalunya - 2020-21Lpez DaniNo ratings yet
- 00-Automatització Ima23Document52 pages00-Automatització Ima23Alfonso Molanes GarciaNo ratings yet
- CIIA Guia de Treball Tema 1 - 1 V7Document19 pagesCIIA Guia de Treball Tema 1 - 1 V7paula RPNo ratings yet
- Solucionario 16Document11 pagesSolucionario 16migasconpan777No ratings yet
- 05.554 07 Estructura de Control AlternativaDocument11 pages05.554 07 Estructura de Control AlternativaVendeta lopezNo ratings yet
- Informe 1 CADocument14 pagesInforme 1 CAJordi Gallart MartínezNo ratings yet
- Parcial 2Document5 pagesParcial 2Pol Martin VergésNo ratings yet
- Pràctica 2 - Equips Perifèrics - C2324Document5 pagesPràctica 2 - Equips Perifèrics - C2324Jesús Oran SansNo ratings yet
- Tema 3Document24 pagesTema 3Hanan AmarkiNo ratings yet
- 009 - 1 - ASIX2 - M6 - Practica Tema 1 Uf1 Administració de Processos Del SistemaDocument2 pages009 - 1 - ASIX2 - M6 - Practica Tema 1 Uf1 Administració de Processos Del SistemaPsot GasrNo ratings yet
- Domotica Amb ZelioDocument117 pagesDomotica Amb ZeliojnoguesNo ratings yet
- Practica 1 Grup 3Document10 pagesPractica 1 Grup 3Adrià Garcia RamosNo ratings yet
- Pract7 Ascensor PDFDocument4 pagesPract7 Ascensor PDFAlex TamayoNo ratings yet
- Practica3 20 21Document5 pagesPractica3 20 21marc arnauNo ratings yet