You might also like
- Catalog Pentax Dsi400Document8 pagesCatalog Pentax Dsi400Alireza KhodabandehNo ratings yet
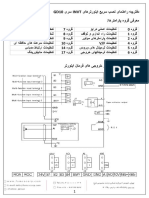
- Invt Inverter gd20 User ManualDocument12 pagesInvt Inverter gd20 User ManualAbolghasem PouraminiNo ratings yet
- Ma610 - Farsi ManualDocument61 pagesMa610 - Farsi ManualMohammad HosseinNo ratings yet
- 1Document59 pages1bahmanNo ratings yet
- Transfer UnitDocument123 pagesTransfer UnitAmir BakhshiyanNo ratings yet
- P SeriesDocument46 pagesP Seriesmmoohhsseenn6633No ratings yet
- دفترچه راهنمای تابلو آرا فراز نوینDocument39 pagesدفترچه راهنمای تابلو آرا فراز نوینjohnny.lip.322No ratings yet
- MM MMDocument6 pagesMM MMMajid KhoshnamaNo ratings yet
- Arcode PDFDocument53 pagesArcode PDFhussainNo ratings yet
- آزمون برنامه نویسی ویرایش 3 PLCDocument6 pagesآزمون برنامه نویسی ویرایش 3 PLCAlireza MoradiNo ratings yet
- CHF100-Farsi 093343Document36 pagesCHF100-Farsi 093343jalil zareNo ratings yet
- Mach3 Mag3 Mag3Document10 pagesMach3 Mag3 Mag3abelmil123No ratings yet
- آزمون برنامه نویسی PLCDocument6 pagesآزمون برنامه نویسی PLCAlireza MoradiNo ratings yet
- کاتالوگ فارسی مدار فرمان جک پارکینگی دولنگه رامونا فولDocument16 pagesکاتالوگ فارسی مدار فرمان جک پارکینگی دولنگه رامونا فولsajad hejaziNo ratings yet
- FC 51Document2 pagesFC 51bahmanNo ratings yet
- یاهرترونیا عیرس بصن یامنهار هچرتفد Invt یرس GD10 یفرعم هورگ اهرتماراپDocument20 pagesیاهرترونیا عیرس بصن یامنهار هچرتفد Invt یرس GD10 یفرعم هورگ اهرتماراپjalil zareNo ratings yet
- VVVF Druve SineeDocument6 pagesVVVF Druve SineesmsobhanNo ratings yet
- Polar Grinding MachineDocument204 pagesPolar Grinding MachineAmir BakhshiyanNo ratings yet
- (521594) Sim2k34 18 881Document49 pages(521594) Sim2k34 18 881aNo ratings yet
- CAM-Pro TestDocument3 pagesCAM-Pro TestAydin landrudiNo ratings yet
- A1000 - HMI DeltaDocument23 pagesA1000 - HMI Deltawarrior insideNo ratings yet
- T400 Training - THYRIPOL, Structure and OperationDocument76 pagesT400 Training - THYRIPOL, Structure and OperationTohid SoleimaniNo ratings yet
- DELTA - ASDA B2 StartDocument10 pagesDELTA - ASDA B2 StartnasserNo ratings yet
- Screenshot 2021-04-30 at 3.06.38 PMDocument56 pagesScreenshot 2021-04-30 at 3.06.38 PMshahryar BRVNo ratings yet
- LG - Iv 5Document1 pageLG - Iv 5ali ganjiNo ratings yet
- جزوه آشنایی با PLC (PowerEn.ir) PDFDocument81 pagesجزوه آشنایی با PLC (PowerEn.ir) PDFMehdi SHNo ratings yet
- MVM 530 OBD CodesDocument5 pagesMVM 530 OBD Codesnopihi1858No ratings yet
- '1Document3 pages'1khorramfarzad425No ratings yet
- دستورالعمل مدول های کلاچDocument6 pagesدستورالعمل مدول های کلاچAmirmasoudNo ratings yet
- PLC S7 - 1Document43 pagesPLC S7 - 1shahriar.mrdnNo ratings yet
- Ips-E-El-100 - 21-12-1400Document13 pagesIps-E-El-100 - 21-12-1400Hossein Jalali Moghaddam100% (1)
- جزییات بسته اتوماسیون زیمنسDocument34 pagesجزییات بسته اتوماسیون زیمنسamir iamirNo ratings yet
- Jozveh Seminar 96Document40 pagesJozveh Seminar 96kfathi55100% (1)
- Mt543e PlusDocument10 pagesMt543e PlusMojtaba RiaziNo ratings yet
- مشخصات پست برق فوق توزیع کارخانه آلومینیوم اراکDocument47 pagesمشخصات پست برق فوق توزیع کارخانه آلومینیوم اراکamir iamirNo ratings yet
- IN-NTدفترچه راهنمای نصبDocument7 pagesIN-NTدفترچه راهنمای نصبehsan mashhadiNo ratings yet
- Servo Motor IntroductionDocument13 pagesServo Motor IntroductionMarlon JohnsonNo ratings yet
- Utility Stop and Shut Down Check ListDocument1 pageUtility Stop and Shut Down Check ListbehzadNo ratings yet
- Manual 637566727550760748Document6 pagesManual 637566727550760748hrsNo ratings yet
- MosalasezardDocument55 pagesMosalasezardfatemehNo ratings yet
- راهنمای راه اندازی فارسیDocument16 pagesراهنمای راه اندازی فارسیmajidsafariNo ratings yet
- نقشه خوانی PidDocument10 pagesنقشه خوانی PidBaba DookNo ratings yet
- FATEK Basic Training Booklet-V01 PDFDocument33 pagesFATEK Basic Training Booklet-V01 PDFMahdi DehghankarNo ratings yet
- Pars Fanal Price List From 98.02.01 HakimDocument14 pagesPars Fanal Price List From 98.02.01 HakimMohsen YazdaniNo ratings yet
- MG EngineRPM DiagnosisRepair GuideDocument6 pagesMG EngineRPM DiagnosisRepair Guideamirrezamohamadi73No ratings yet
- PLC S7-300.400: Level (I)Document183 pagesPLC S7-300.400: Level (I)mohammad parastoNo ratings yet
- Simaran sgd90 Sliding Glass Door OperatorDocument25 pagesSimaran sgd90 Sliding Glass Door Operator8819133No ratings yet
- درایو یا اینورتر الکتروموتور چیست؟ + بلوک دیاگرام + برندهای معروف - آکادمی تسلا کالاDocument7 pagesدرایو یا اینورتر الکتروموتور چیست؟ + بلوک دیاگرام + برندهای معروف - آکادمی تسلا کالاmotaba eslaminiyaNo ratings yet
- Manual TCS500Document4 pagesManual TCS500alisalar1No ratings yet
- MVM530 Tiggo Motor - Manual PDFDocument75 pagesMVM530 Tiggo Motor - Manual PDFHamidNo ratings yet
- طراحی و ساخت رله اضافه جریان جهتی نیومریکالDocument11 pagesطراحی و ساخت رله اضافه جریان جهتی نیومریکالMajid KhoshnamaNo ratings yet
- Megane Fault Finding IntroductionDocument10 pagesMegane Fault Finding Introductionعرفان فلاحNo ratings yet
- Fault Code 206Document23 pagesFault Code 206Reza RashidiNo ratings yet
- Mas ECU Service ManualGuideDocument9 pagesMas ECU Service ManualGuideAmiir BrNo ratings yet
- پروتکل هارتDocument31 pagesپروتکل هارتsajad hejaziNo ratings yet
- درایو چیستDocument19 pagesدرایو چیستbahmanNo ratings yet
- Immo CIMDocument5 pagesImmo CIMivecoNo ratings yet
- ER RahnamaDocument33 pagesER RahnamaAbdulla IslamiNo ratings yet