You might also like
- BimmerCode - Some Cheats - July 2020Document20 pagesBimmerCode - Some Cheats - July 2020José Walter Machado Alessi100% (4)
- JY901 Gyroscope User Manual by ElecmasterDocument25 pagesJY901 Gyroscope User Manual by ElecmasterElecmaster100% (1)
- dsp9600Document19 pagesdsp9600Dolan MartinNo ratings yet
- User Manual v2 9-AMC-AASD15A 4DOF+TL+Surge-SRS-SimtoolsDocument29 pagesUser Manual v2 9-AMC-AASD15A 4DOF+TL+Surge-SRS-Simtoolsnelu petNo ratings yet
- TNG Release Notes 502Document14 pagesTNG Release Notes 502alecandro_90No ratings yet
- EN-Configurator - TSDZ2-mb.20beta1.ADocument14 pagesEN-Configurator - TSDZ2-mb.20beta1.AAlex GarridoNo ratings yet
- How To Control Stepper Motor With A4988 Driver and ArduinoDocument4 pagesHow To Control Stepper Motor With A4988 Driver and ArduinoAnonymous e3XZzQNo ratings yet
- RAS Rot2ProgDocument12 pagesRAS Rot2ProgAlen JefryNo ratings yet
- MD11-1 NC Controller Operation ManualDocument8 pagesMD11-1 NC Controller Operation Manualjmilomir6512100% (1)
- Keya Monitor Software User Manual PDFDocument14 pagesKeya Monitor Software User Manual PDFAndreyPovoroznyukNo ratings yet
- CQ6236, CQ6240-1Document30 pagesCQ6236, CQ6240-1Andy LNo ratings yet
- 3.6.1.2 Packet Tracer - Configure AAA Authentication On Cisco Routers - InstructorDocument6 pages3.6.1.2 Packet Tracer - Configure AAA Authentication On Cisco Routers - InstructorSalem TrabelsiNo ratings yet
- Readme Eng 2.5Document4 pagesReadme Eng 2.5Stephen OndiekNo ratings yet
- RC Quadcopter Racing SimulatorDocument15 pagesRC Quadcopter Racing SimulatorGuille MNo ratings yet
- FPVFreerider ManualDocument15 pagesFPVFreerider ManualOskar ZubiaNo ratings yet
- FPVFreerider ManualDocument15 pagesFPVFreerider ManualAlberto de Jesús Santos VillalobosNo ratings yet
- FPV Freerider ManualDocument13 pagesFPV Freerider ManualbiduleNo ratings yet
- FPVFreerider Manual PDFDocument13 pagesFPVFreerider Manual PDFLejeune HerveNo ratings yet
- Configure and Test A Stepper MotorDocument3 pagesConfigure and Test A Stepper MotorSubhasis BiswasNo ratings yet
- SMC4-4-16A16B Four-Axis Motion Controller Instruction ManualDocument14 pagesSMC4-4-16A16B Four-Axis Motion Controller Instruction ManuallucaNo ratings yet
- User Manual For Control Board KS200-Detailed VersionDocument10 pagesUser Manual For Control Board KS200-Detailed Versionhaquiroz047No ratings yet
- Up/Down Shift Assist: Installation and UseDocument12 pagesUp/Down Shift Assist: Installation and UseluizNo ratings yet
- FPVFreerider ManualDocument16 pagesFPVFreerider ManualGustoyleNo ratings yet
- Turtle KitDocument51 pagesTurtle KitInstituto La Católica HuánucoNo ratings yet
- Delem: DAC-350 Operation ManualDocument34 pagesDelem: DAC-350 Operation ManualRMK BrothersNo ratings yet
- BLP-10 EngDocument12 pagesBLP-10 EngvxiebdjebebehdhNo ratings yet
- Newbies Guide To CRIUS MultiWii SE Board and SoftwareDocument10 pagesNewbies Guide To CRIUS MultiWii SE Board and SoftwareTatimaxNo ratings yet
- Ks0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleDocument13 pagesKs0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleBarmaley67No ratings yet
- G-CENTRI FORCE PLC's ManualDocument19 pagesG-CENTRI FORCE PLC's ManualShahaji ChavanNo ratings yet
- N800A ApllicationDocument342 pagesN800A Apllicationcristian17283No ratings yet
- Hy-Ba: User ManualDocument33 pagesHy-Ba: User ManualJeyson Castillo MenaNo ratings yet
- Eco-Drive Configuration: User ManualDocument15 pagesEco-Drive Configuration: User ManualGonzalo ADS LogicNo ratings yet
- EM,EP ENGLISH 매뉴얼Document224 pagesEM,EP ENGLISH 매뉴얼Bình Nguyễn DuyNo ratings yet
- Challenger7 Fly by Wire - V100Document21 pagesChallenger7 Fly by Wire - V100GustavoNo ratings yet
- Procedimiento en TabularDocument6 pagesProcedimiento en Tabularhenry gavancho cutiNo ratings yet
- Instructions of Laser Welding SoftwareDocument17 pagesInstructions of Laser Welding SoftwareBob FazrilNo ratings yet
- Bildr Use The Easydriver Stepper Motor Driver..Document5 pagesBildr Use The Easydriver Stepper Motor Driver..fayazrashNo ratings yet
- Infoplc Net Guide For Twincat NC ControlDocument19 pagesInfoplc Net Guide For Twincat NC ControlPaul EspinosaNo ratings yet
- Multiwii Software GUIDEDocument10 pagesMultiwii Software GUIDEHiroshi TakeshiNo ratings yet
- 928TC eDocument113 pages928TC eGuillermo RamirezNo ratings yet
- Chapter 7 System InformationDocument7 pagesChapter 7 System InformationIllimination Illuminated MinisatanNo ratings yet
- JY-901 MPU6050 Module Quick Start by ElecmasterDocument5 pagesJY-901 MPU6050 Module Quick Start by ElecmasterElecmasterNo ratings yet
- Panasonic MINAS A5Document478 pagesPanasonic MINAS A5Vaikuntam Ramamurthy100% (1)
- Healtech Rapport EngagéDocument4 pagesHealtech Rapport EngagéFoggy211No ratings yet
- User Manual: Second EditionDocument15 pagesUser Manual: Second EditionDennis XenosNo ratings yet
- Revive DX Computer User GuideDocument4 pagesRevive DX Computer User GuideregreeNo ratings yet
- CRIUS MultiWii SE BoardDocument13 pagesCRIUS MultiWii SE BoardhkycflogNo ratings yet
- User Manual Dc21 enDocument24 pagesUser Manual Dc21 enAeroinformadoNo ratings yet
- DSE704 Manual PDFDocument15 pagesDSE704 Manual PDFEduardo DavidNo ratings yet
- YL80C ManualDocument25 pagesYL80C ManualmrperikNo ratings yet
- Downloaded From Manuals Search EngineDocument24 pagesDownloaded From Manuals Search EngineReynerio HidalgoNo ratings yet
- RE 7500 Manual EnglishDocument20 pagesRE 7500 Manual EnglishGunnar Chop100% (1)
- Fagor 800T CNCDocument120 pagesFagor 800T CNCNanda KumarNo ratings yet
- Figure 1.1 4 DOF RobotDocument15 pagesFigure 1.1 4 DOF RobotPhong NguyenNo ratings yet
- As Tronic Operators ManualDocument42 pagesAs Tronic Operators Manualmsaad19103564100% (1)
- L20se 0425Document24 pagesL20se 0425christian frogerNo ratings yet
- Motion PTO WizardDocument8 pagesMotion PTO WizardHữu Tấn NguyễnNo ratings yet
- Tarot 2-Axis Brushless Gimbal For Gopro User Manual V1.0: Connections InstructionsDocument8 pagesTarot 2-Axis Brushless Gimbal For Gopro User Manual V1.0: Connections InstructionsonurdasNo ratings yet
- Model 2000 2 Stroke Manual Rev BDocument8 pagesModel 2000 2 Stroke Manual Rev Bmark zottmanNo ratings yet
- Essential Scooter Maintenance for the Absolute BeginnerFrom EverandEssential Scooter Maintenance for the Absolute BeginnerNo ratings yet
- Tool Holder DrawingDocument1 pageTool Holder DrawingAndy LNo ratings yet
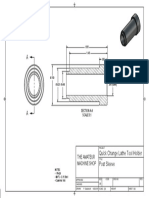
- Post Sleeve DrawingDocument1 pagePost Sleeve DrawingAndy LNo ratings yet
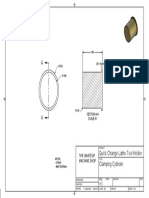
- Clamping Cylinder DrawingDocument1 pageClamping Cylinder DrawingAndy LNo ratings yet
- Swivel Bar DrawingDocument1 pageSwivel Bar DrawingAndy LNo ratings yet
- Post Cam DrawingDocument1 pagePost Cam DrawingAndy LNo ratings yet
- Lauf RolleDocument1 pageLauf RolleAndy LNo ratings yet
- Garrick Herbert CatalogueDocument50 pagesGarrick Herbert CatalogueAndy LNo ratings yet
- Csa120k SeriesDocument24 pagesCsa120k SeriesAndy LNo ratings yet
- Csa 120 TeDocument30 pagesCsa 120 TeAndy LNo ratings yet
- Trax Tool Product CatalogueDocument61 pagesTrax Tool Product CatalogueAndy LNo ratings yet
- Csa 120 TeDocument30 pagesCsa 120 TeAndy LNo ratings yet
- Csa120k SeriesDocument24 pagesCsa120k SeriesAndy LNo ratings yet
- Csa 75 KeDocument98 pagesCsa 75 KeAndy LNo ratings yet
- Csa 120 TeDocument30 pagesCsa 120 TeAndy LNo ratings yet
- Csa 75 KeDocument98 pagesCsa 75 KeAndy LNo ratings yet
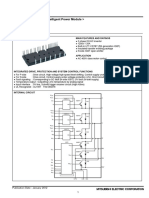
- Ps22a78 EDocument11 pagesPs22a78 EAndy LNo ratings yet
- Jabra Motion UC and Motion UC Plus 301112 - ENDocument31 pagesJabra Motion UC and Motion UC Plus 301112 - ENAndy LNo ratings yet
- Cs Panasonic AcDocument114 pagesCs Panasonic AcAndy LNo ratings yet
- SMC FrontPanel ExtensionBoardV8 SMD SchematicDocument1 pageSMC FrontPanel ExtensionBoardV8 SMD SchematicAndy LNo ratings yet
- SMC FrontPanel ExtensionBoard V14 5Document2 pagesSMC FrontPanel ExtensionBoard V14 5Andy LNo ratings yet
- PT Parts - Poly-V Pulleys & BeltsDocument12 pagesPT Parts - Poly-V Pulleys & BeltsAndy LNo ratings yet
- Pegasus Spare PartsDocument54 pagesPegasus Spare PartsAndy LNo ratings yet
- pm50cl1b120 eDocument9 pagespm50cl1b120 eAndy LNo ratings yet
- Pid1 01 0Document52 pagesPid1 01 0Andy LNo ratings yet
- Pegasus User ManualDocument72 pagesPegasus User ManualAndy LNo ratings yet
- IC Scooter Cat - Nov 2020 Low ResDocument20 pagesIC Scooter Cat - Nov 2020 Low ResAndy LNo ratings yet
- Korean 3D TemplateDocument1 pageKorean 3D TemplateAndy LNo ratings yet
- Man Ssa Ug en 0698Document43 pagesMan Ssa Ug en 0698Andy LNo ratings yet
- HWFR6510 Aus M en QSPGDocument3 pagesHWFR6510 Aus M en QSPGAndy LNo ratings yet
- Sap NotebookDocument176 pagesSap NotebookGobara DhanNo ratings yet
- 02 - Create Wired and Wireless Policy SetsDocument2 pages02 - Create Wired and Wireless Policy SetsNguyen LeNo ratings yet
- Madan Digital NotesDocument107 pagesMadan Digital NotesMM GOPALNo ratings yet
- 80434-Fixed Assets in Microsoft Dynamics NAV 2013Document4 pages80434-Fixed Assets in Microsoft Dynamics NAV 2013amsNo ratings yet
- Odroid Magazine. April 2019.issue 64Document66 pagesOdroid Magazine. April 2019.issue 64iscrbdiNo ratings yet
- HUAWEI UGW9811 Unified Gateway V900R011C00 Product Description PDFDocument65 pagesHUAWEI UGW9811 Unified Gateway V900R011C00 Product Description PDFLuis OscarNo ratings yet
- Ai Unit 2 Class 9Document35 pagesAi Unit 2 Class 9Yuvraj RathoreNo ratings yet
- Effective Windows PowerShellDocument50 pagesEffective Windows PowerShellAbby LiuNo ratings yet
- Untitled DocumentDocument6 pagesUntitled Documentkathleen PerezNo ratings yet
- SCD5200 CPU OptoNet Power Supply Ethernet (COPE) ModuleDocument8 pagesSCD5200 CPU OptoNet Power Supply Ethernet (COPE) ModuleWisnu HartonoNo ratings yet
- MoaiProjectSetup PDFDocument14 pagesMoaiProjectSetup PDFsdfasdfkksfjNo ratings yet
- Illustrated Microsoft Office 365 and Office 2016 Projects Loose Leaf Version 1st Edition Cram Solutions Manual DownloadDocument10 pagesIllustrated Microsoft Office 365 and Office 2016 Projects Loose Leaf Version 1st Edition Cram Solutions Manual DownloadJan Neeley100% (22)
- Net102 Midterm Lab-Activity-1Document2 pagesNet102 Midterm Lab-Activity-1John Carlo Mesina GomezNo ratings yet
- LS GM6 - PafaDocument70 pagesLS GM6 - PafaTrọng HiếuNo ratings yet
- Product Innovation Platforms: Enabling Product Design and PLM in The Digital Business EraDocument25 pagesProduct Innovation Platforms: Enabling Product Design and PLM in The Digital Business ErafuckscribNo ratings yet
- Sign Language Interpretor ProposalDocument73 pagesSign Language Interpretor ProposalPius VirtNo ratings yet
- Oracle VM and NetApp Storage Best Practices Guide Tr-3712Document73 pagesOracle VM and NetApp Storage Best Practices Guide Tr-3712kriole13No ratings yet
- Ditf301 Unit 1Document25 pagesDitf301 Unit 1Pratibha BhadauriyaNo ratings yet
- Unit 1Document53 pagesUnit 1malathi100% (1)
- Inglês - Aula 52Document10 pagesInglês - Aula 52Ana Clara ContaratoNo ratings yet
- Packet Power Multi-Circuit MonitoringDocument4 pagesPacket Power Multi-Circuit Monitoringmozdemir79No ratings yet
- DAQLINKII Manual 9 2009Document100 pagesDAQLINKII Manual 9 2009Carlo RojasNo ratings yet
- MM-FI Integration in PO For Handling Down PaymentsDocument8 pagesMM-FI Integration in PO For Handling Down PaymentsAgastya Pavan KumarNo ratings yet
- TL 9000 Requirements Handbook Release 5.5 ChangesDocument33 pagesTL 9000 Requirements Handbook Release 5.5 Changescoolchads0% (1)
- Micro Project Proposal: Sharad Institute of Technology, PolytechnicDocument5 pagesMicro Project Proposal: Sharad Institute of Technology, PolytechnicAshish AmbiNo ratings yet
- E27307Document28 pagesE27307Tarcisio FreitasNo ratings yet
- CN Chapter1Document22 pagesCN Chapter1nishitha.eeeNo ratings yet
- Axlfbkeipef: Axioline F Bus Coupler For Ethernet/Ip™, Extended FunctionDocument21 pagesAxlfbkeipef: Axioline F Bus Coupler For Ethernet/Ip™, Extended FunctionItachi UchihaNo ratings yet
- Security Logging StandardDocument6 pagesSecurity Logging StandardLayer8 IOTNo ratings yet