You might also like
- Raspberry PI DIY Night Vision GogglesDocument6 pagesRaspberry PI DIY Night Vision GogglesAdven TuresNo ratings yet
- How to Build a Junk Recumbent Trike from Scrap MaterialsDocument9 pagesHow to Build a Junk Recumbent Trike from Scrap MaterialsAbelardo Saldaña100% (1)
- Foam RC Airplane - UnknownDocument10 pagesFoam RC Airplane - UnknownEnache Daniel100% (1)
- Make Magazine - Vol 33Document164 pagesMake Magazine - Vol 33Megan Hall100% (3)
- Tesla Cybertruck DIY Made of PaperDocument9 pagesTesla Cybertruck DIY Made of PaperCalvinNo ratings yet
- Wood Propeller FabricationDocument13 pagesWood Propeller FabricationconystanNo ratings yet
- Portal Issue 25 Jul-Aug12Document52 pagesPortal Issue 25 Jul-Aug12USER_42100% (1)
- DIY Arduino Drawing MachineDocument19 pagesDIY Arduino Drawing MachineBeto53No ratings yet
- Safety Manual - CAT 3516Document15 pagesSafety Manual - CAT 3516areef007No ratings yet
- Tinkercad Simple Hand TutorialDocument11 pagesTinkercad Simple Hand TutorialjayeshNo ratings yet
- CARDBOARD Robotic Hydraulic ArmDocument15 pagesCARDBOARD Robotic Hydraulic ArmIts Krstn SlaysNo ratings yet
- Tabela de Códigos OBD-2Document4 pagesTabela de Códigos OBD-2RicardoNo ratings yet
- Ball Balancing RobotDocument67 pagesBall Balancing RobotdorivolosNo ratings yet
- Instructables Micro Paper Robots Cyborg CrabDocument13 pagesInstructables Micro Paper Robots Cyborg CrabLord_Darth_VaderNo ratings yet
- Robotic Paper Octopus With MicrobitDocument19 pagesRobotic Paper Octopus With MicrobitAmaNo ratings yet
- How to Make a Cardboard Robot That Eats CoinsDocument11 pagesHow to Make a Cardboard Robot That Eats CoinsPaul bayntonNo ratings yet
- Beetle BotDocument4 pagesBeetle Botnarucki2No ratings yet
- Tesla Cybertruck DIY Paper Model TutorialDocument5 pagesTesla Cybertruck DIY Paper Model TutorialBence 2018No ratings yet
- ReportdDocument16 pagesReportdaliha khanNo ratings yet
- Fidget Spinning RobotDocument8 pagesFidget Spinning RobotJhonny Roy Salomon DonayreNo ratings yet
- PAPER HUNGRY ROBOT Pringles Recycle Arduino RobotDocument20 pagesPAPER HUNGRY ROBOT Pringles Recycle Arduino RobotZeineb KassisNo ratings yet
- Rainbow d20 Icosahedron Cube Under 20Document32 pagesRainbow d20 Icosahedron Cube Under 20Zeal EducationNo ratings yet
- 3ds Max How To Make and Animate TanDocument10 pages3ds Max How To Make and Animate Tangamma1AANo ratings yet
- DiydtgDocument29 pagesDiydtgHazyScoresazyNo ratings yet
- Eagle Hackstricks Example TB6600 CNC Mill StepperDocument12 pagesEagle Hackstricks Example TB6600 CNC Mill StepperfoobarNo ratings yet
- How To Build The One Motor WalkerDocument16 pagesHow To Build The One Motor WalkerSagar TatipamulaNo ratings yet
- The MagPi Issue 6 enDocument32 pagesThe MagPi Issue 6 enRonald Picon PeláezNo ratings yet
- CleanSweep The Floor Cleaning RobotDocument29 pagesCleanSweep The Floor Cleaning RobottasibkhanNo ratings yet
- Grippy Silicone Tires for RobotsDocument10 pagesGrippy Silicone Tires for RobotsNatanael Welbes LuizNo ratings yet
- Giant Outdoor Robot: by Dvda2108Document28 pagesGiant Outdoor Robot: by Dvda2108rhinorodNo ratings yet
- Team Phoenix: Consisting Of: Ben Rothstein & Paul HansenDocument14 pagesTeam Phoenix: Consisting Of: Ben Rothstein & Paul HansenPaul HansenNo ratings yet
- DIY Space Mouse For Fusion 360 Using MagnetsDocument36 pagesDIY Space Mouse For Fusion 360 Using MagnetsferdiatayNo ratings yet
- Cotton Swab Card Stock Micro GlidersDocument26 pagesCotton Swab Card Stock Micro GliderswalidNo ratings yet
- Makecode Arcade Pixel AnimationDocument34 pagesMakecode Arcade Pixel Animation08larsNo ratings yet
- Kinetic Sculpture DIY: Build an Innovative Sculpture That Moves with the WindDocument21 pagesKinetic Sculpture DIY: Build an Innovative Sculpture That Moves with the WindkimcorNo ratings yet
- Instructables' Official Papercraft Robot!: Technology Workshop Craft Home Food Play Outside CostumesDocument10 pagesInstructables' Official Papercraft Robot!: Technology Workshop Craft Home Food Play Outside CostumesvaibhavNo ratings yet
- DIY Hyperloop Guide: Build a Mini Hyperloop VehicleDocument9 pagesDIY Hyperloop Guide: Build a Mini Hyperloop VehicleSashankNiroulaNo ratings yet
- Articulated Creatures With Tinkercad Connectors: InstructablesDocument11 pagesArticulated Creatures With Tinkercad Connectors: InstructablesBENEDETTO AMALFINo ratings yet
- Turn Any 3D Shape into a Real Object with a Hot Wire CNCDocument25 pagesTurn Any 3D Shape into a Real Object with a Hot Wire CNCMarius DanilaNo ratings yet
- DIY Cardboard Glider: Technology Workshop Craft Home Food Play Outside CostumesDocument6 pagesDIY Cardboard Glider: Technology Workshop Craft Home Food Play Outside CostumesSantiago FariñaNo ratings yet
- 3D Printable GLaDOS Robotic LampDocument36 pages3D Printable GLaDOS Robotic LampJosé Elías Garza VázquezNo ratings yet
- 3D Printed StormTrooper Action Figure Realistic ArDocument33 pages3D Printed StormTrooper Action Figure Realistic Arluis muñoz torralvoNo ratings yet
- How-To: DIYDTG: Home Hackaday Projects Our Videos Submit A Tip Forums AboutDocument29 pagesHow-To: DIYDTG: Home Hackaday Projects Our Videos Submit A Tip Forums AboutandyzireNo ratings yet
- Comics Shoes: Hightops & Platform Clogs: Technology Workshop Living Food Play OutsideDocument8 pagesComics Shoes: Hightops & Platform Clogs: Technology Workshop Living Food Play OutsideManuela EspinozaNo ratings yet
- The Drone PiDocument15 pagesThe Drone PiCorrey Ananta AdhilaksmaNo ratings yet
- How To Make A Constructicons Devastator CostumeDocument20 pagesHow To Make A Constructicons Devastator CostumeAlex DavisNo ratings yet
- 3D Printed RC Tank Car Apocalypse StyleDocument28 pages3D Printed RC Tank Car Apocalypse StyleLowell WhiteheadNo ratings yet
- Digi-Comp II Replica: InstructablesDocument18 pagesDigi-Comp II Replica: InstructablesxcianoNo ratings yet
- Arduino 3D Printed CNC Pen PlotterDocument37 pagesArduino 3D Printed CNC Pen Plotterseynif015No ratings yet
- CNC Cyclone PCB Factory, My Way, Step by Step.: InstructablesDocument28 pagesCNC Cyclone PCB Factory, My Way, Step by Step.: InstructablesАлексей АндрияшNo ratings yet
- Modeling, Uvmapping and Texturing A Low Poly T-Rex in Blender, Part 1Document43 pagesModeling, Uvmapping and Texturing A Low Poly T-Rex in Blender, Part 1Andrew LawrenceNo ratings yet
- RC LEGO The Bull BuggyDocument64 pagesRC LEGO The Bull BuggyCesar GonzalezNo ratings yet
- Finally, I Choose The Robot As My Windup Toy. It Is Because The Mechanism of The Windup Robot Is More Significant Than The OthersDocument5 pagesFinally, I Choose The Robot As My Windup Toy. It Is Because The Mechanism of The Windup Robot Is More Significant Than The OthersshingkamwongNo ratings yet
- Red Oak Pyramid BowDocument17 pagesRed Oak Pyramid BowYuvaraj MaranNo ratings yet
- Kinetic Sculpture V1Document23 pagesKinetic Sculpture V1Mariano Ariel GuzmánNo ratings yet
- 3d Printed Folding Castle Dice Tower With Tinkercad: InstructablesDocument6 pages3d Printed Folding Castle Dice Tower With Tinkercad: InstructablespadovanNo ratings yet
- Portable Camera Crane BaseDocument6 pagesPortable Camera Crane Baseadnan abdulmalikNo ratings yet
- Yu Gi Oh Curse of Dragon OrigamiDocument13 pagesYu Gi Oh Curse of Dragon OrigamihemolNo ratings yet
- Robotic Cum Prosthetic HandDocument51 pagesRobotic Cum Prosthetic Handkeegan van den bergNo ratings yet
- 3D Printed DIY Remote Controlled Tank With OperatiDocument98 pages3D Printed DIY Remote Controlled Tank With OperatitarijkNo ratings yet
- ESP32 Micro Robot Arm: Build a Simple Stepper Motor Robot Arm Using an ESP32Document6 pagesESP32 Micro Robot Arm: Build a Simple Stepper Motor Robot Arm Using an ESP32Luis DiazNo ratings yet
- Otn, Otr, Otf TransformersDocument6 pagesOtn, Otr, Otf TransformersDott PalmitoNo ratings yet
- Manual Service Kyocera Fs-5300Document180 pagesManual Service Kyocera Fs-5300andresm4100% (1)
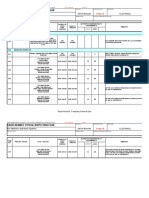
- Saudi Aramco Typical Inspection Plan: Fire Detection and Alarm Systems SATIP-B-014-01 ElectricalDocument18 pagesSaudi Aramco Typical Inspection Plan: Fire Detection and Alarm Systems SATIP-B-014-01 ElectricalSajid ShaikhNo ratings yet
- Liquid Ring Pump Disassembly & Assembly InstructionsDocument34 pagesLiquid Ring Pump Disassembly & Assembly Instructionstutuli1990No ratings yet
- 700KS KST-0811Document5 pages700KS KST-0811Antonio AndionNo ratings yet
- Iceworm Papercraft Subnautica Below ZeroDocument34 pagesIceworm Papercraft Subnautica Below ZeroIsmael SanchezNo ratings yet
- Dewan Md. Iftakharul Anik: Career ObjectiveDocument2 pagesDewan Md. Iftakharul Anik: Career ObjectiveDewan Md. Iftakharul AnikNo ratings yet
- BS16Q14A Outdoor Unit Pipe Connection Port LocationsDocument1 pageBS16Q14A Outdoor Unit Pipe Connection Port LocationsPaulKajzerNo ratings yet
- Selecting the Proper Bearing Type for Shaft SupportDocument2 pagesSelecting the Proper Bearing Type for Shaft SupportIlman IhzaNo ratings yet
- Accessories: Test and Training Set Switchgear SimulatorDocument4 pagesAccessories: Test and Training Set Switchgear SimulatorJoseph KrauseNo ratings yet
- TV RepairDocument10 pagesTV RepairMahmoud MansourNo ratings yet
- Panasonic (ICT Introduction)Document33 pagesPanasonic (ICT Introduction)Tippeswami mNo ratings yet
- MS 9200UDLS DatasheetDocument6 pagesMS 9200UDLS DatasheetHomeroJaramilloNo ratings yet
- PSU converts AC to DCDocument9 pagesPSU converts AC to DCKecik ChelseaNo ratings yet
- Owners Manual Fire-Safe Safes Manuel Du Propriétaire Coffres-Forts Fire-Safe Manual Del Usuario Cajas Fuertes Fire-SafeDocument13 pagesOwners Manual Fire-Safe Safes Manuel Du Propriétaire Coffres-Forts Fire-Safe Manual Del Usuario Cajas Fuertes Fire-SafeJVH1978No ratings yet
- A500 (40RH - 42RH - 42re - 44re) - PDFDocument6 pagesA500 (40RH - 42RH - 42re - 44re) - PDFPedro Flores100% (1)
- Westinghouse Lighting Catalogue 2019Document44 pagesWestinghouse Lighting Catalogue 2019Pitarakis NikosNo ratings yet
- Container Handler - Reach Stackers - Taylor® XRS-9972H3Document4 pagesContainer Handler - Reach Stackers - Taylor® XRS-9972H3TAIYONG GUONo ratings yet
- C600 - Inventec Calcutta 10Document5 pagesC600 - Inventec Calcutta 10Vika Fivi AnggrainiNo ratings yet
- Maz - PRJ - Hse - PRC 10 - Lifting Operations Procedures 001Document8 pagesMaz - PRJ - Hse - PRC 10 - Lifting Operations Procedures 001ghazi kallelNo ratings yet
- 4 Suspension BenchDocument5 pages4 Suspension BenchTecnicas Reunidas de AutomociónNo ratings yet
- Citizen Cl-s621 UputstvoDocument66 pagesCitizen Cl-s621 UputstvoBoris StankovićNo ratings yet
- Twin Disc replacement parts for saleDocument12 pagesTwin Disc replacement parts for salejorge luis avalosNo ratings yet
- Inverter Settings LiFePO4Document1 pageInverter Settings LiFePO4Kyaw Swar LinNo ratings yet
- (2011) Rail-to-Rail IO AmpsDocument71 pages(2011) Rail-to-Rail IO AmpsMostafa M. SamiNo ratings yet
- Manual Valves, Control Valves Inspection and TestingDocument112 pagesManual Valves, Control Valves Inspection and TestingJawa MechanikkNo ratings yet
- Dca 7000 Modelo ObsoletoDocument2 pagesDca 7000 Modelo ObsoletoAlejandro CastilloNo ratings yet