You might also like
- Wavemaker TheoriesDocument33 pagesWavemaker TheoriesRonaldyn DabuNo ratings yet
- Jmse 10 01792 v2Document13 pagesJmse 10 01792 v2ThiyagarajanNo ratings yet
- Experimental Investigation of The PlungeDocument22 pagesExperimental Investigation of The PlungePrakash Duraisamy CITNo ratings yet
- Problems in Quantum Mechanics: Third EditionFrom EverandProblems in Quantum Mechanics: Third EditionRating: 3 out of 5 stars3/5 (2)
- Kompendium PDFDocument142 pagesKompendium PDFsiladharmaNo ratings yet
- Nwogu Omae 1991Document6 pagesNwogu Omae 1991mohdsolihat1No ratings yet
- L.O. Baksmaty Et Al - Tkachenko Waves in Rapidly Rotating Bose-Einstein CondensatesDocument4 pagesL.O. Baksmaty Et Al - Tkachenko Waves in Rapidly Rotating Bose-Einstein CondensatesPomac232No ratings yet
- FulltextDocument11 pagesFulltextMaytham ShakirNo ratings yet
- Wamit Theory ManualDocument66 pagesWamit Theory Manualspsingh72No ratings yet
- Fuzzy Methods For Modelling Earthquake Induced Sloshing in Rigid ReservoirsDocument7 pagesFuzzy Methods For Modelling Earthquake Induced Sloshing in Rigid ReservoirsЕлена СтрельниковаNo ratings yet
- Thesis ReportDocument15 pagesThesis ReportTabish ShibliNo ratings yet
- CE 1996 Wave Transmission Past Vertical Wave BarriersDocument14 pagesCE 1996 Wave Transmission Past Vertical Wave Barrierswangzerun1997No ratings yet
- Anna University Examinations, Dec. 2014 B.Tech - Chemical Engineering Ch2402 - Transport PhenomenaDocument18 pagesAnna University Examinations, Dec. 2014 B.Tech - Chemical Engineering Ch2402 - Transport Phenomenajeevanantham 5846No ratings yet
- Fred - TM16Document55 pagesFred - TM16Anonymous 1n5HpBjNo ratings yet
- Approximation To The Hydrodynamics of Oating Pontoons Under Oblique WavesDocument20 pagesApproximation To The Hydrodynamics of Oating Pontoons Under Oblique WavesÖmer SukasNo ratings yet
- Dynamic Magnetic WaferDocument5 pagesDynamic Magnetic Waferpepper100No ratings yet
- Simple Physical Models For Foundation DynamicsDocument43 pagesSimple Physical Models For Foundation DynamicsJORGRULESNo ratings yet
- Miquel Bouaanani Engineering Structures 2010Document35 pagesMiquel Bouaanani Engineering Structures 2010rlprNo ratings yet
- Evaluation of Added Mass and Damping PDFDocument10 pagesEvaluation of Added Mass and Damping PDFNadji ChiNo ratings yet
- Wave-Induced Pressure On BreakwatersDocument6 pagesWave-Induced Pressure On BreakwatersJaime Crescente Soto SandovalNo ratings yet
- Sergey K. Nemirovskii and Makoto Tsubota - Trial Distribution Functional of Vortex Tangle in Superfluid HeliumDocument2 pagesSergey K. Nemirovskii and Makoto Tsubota - Trial Distribution Functional of Vortex Tangle in Superfluid HeliumJuaxmawNo ratings yet
- The Interference of Two Coherent Wave SourcesDocument14 pagesThe Interference of Two Coherent Wave SourcesEpic WinNo ratings yet
- The Rate of Change of Momentum of A Body Is Equal To The Resultant Force Acting On The Body, and Takes Place in The Direction of The ForceDocument22 pagesThe Rate of Change of Momentum of A Body Is Equal To The Resultant Force Acting On The Body, and Takes Place in The Direction of The ForceJack SantosNo ratings yet
- Mini Project (Report) (Aditya Gunin)Document20 pagesMini Project (Report) (Aditya Gunin)Soham SahaNo ratings yet
- LKB 30203 Offshore Hydrodynamics - Lecture NotesDocument247 pagesLKB 30203 Offshore Hydrodynamics - Lecture Notesainul sufiahNo ratings yet
- Vortices in Superconductors: Modelling and Computer SimulationsDocument12 pagesVortices in Superconductors: Modelling and Computer Simulationsparsa hooshyarNo ratings yet
- Wave Propagation ModellingDocument12 pagesWave Propagation ModellingsimoNo ratings yet
- Inverse Flux Quantum Periodicity of Magnetoresistance Oscillations in Two-Dimensional Short-Period Surface SuperlatticesDocument11 pagesInverse Flux Quantum Periodicity of Magnetoresistance Oscillations in Two-Dimensional Short-Period Surface SuperlatticesCamilo GonzálezNo ratings yet
- 28 2 Cavitation3 ICFDP7Document10 pages28 2 Cavitation3 ICFDP7Walter AugustNo ratings yet
- Institute For Marine Dynamics, National Research Council, Ottawa, Canada K1A 0R6 467Document15 pagesInstitute For Marine Dynamics, National Research Council, Ottawa, Canada K1A 0R6 467monicaneaguNo ratings yet
- Maxwell's Equations and Their Consequences: Elementary Electromagnetic TheoryFrom EverandMaxwell's Equations and Their Consequences: Elementary Electromagnetic TheoryNo ratings yet
- Sastry 2013Document7 pagesSastry 2013marco_doniseteNo ratings yet
- Settlingvelocitiesofparticulatesystems PDFDocument36 pagesSettlingvelocitiesofparticulatesystems PDFneuro astroNo ratings yet
- Heat Transfer Analysis of Second Grade Fluid Over A Stretching Sheet Through Porous Medium Under The Influence of Chemical Reaction ParameterDocument8 pagesHeat Transfer Analysis of Second Grade Fluid Over A Stretching Sheet Through Porous Medium Under The Influence of Chemical Reaction ParameterTJPRC PublicationsNo ratings yet
- Stokes' and Newton's Viscous DragDocument7 pagesStokes' and Newton's Viscous DragL V SatyavathiNo ratings yet
- Artículo InglésDocument5 pagesArtículo InglésAngel Daniel PalaciosNo ratings yet
- Compressible Unsteady Vortex Lattice Method For Arbitrary Two Dimensional Motion of Thin ProfilesDocument9 pagesCompressible Unsteady Vortex Lattice Method For Arbitrary Two Dimensional Motion of Thin ProfilesFabiano HernandesNo ratings yet
- The AirDocument6 pagesThe Airbharat reddyNo ratings yet
- 0 Ravi Wespac Paper BV VBDocument6 pages0 Ravi Wespac Paper BV VBAmarnathKenguvaNo ratings yet
- Wave Loads On Ships Sailing in Restricted Water DepthDocument17 pagesWave Loads On Ships Sailing in Restricted Water DepthAnwar ALkurayshiNo ratings yet
- Modelling Wave-Induced Pressure On BreakwatersDocument6 pagesModelling Wave-Induced Pressure On BreakwatershamidaffandyNo ratings yet
- Kfvs Adv 2003Document13 pagesKfvs Adv 2003Badreddine EssaidiNo ratings yet
- Assessment of Slam Induced Loads On Two Dimensional Wedges and Ship SectionsDocument10 pagesAssessment of Slam Induced Loads On Two Dimensional Wedges and Ship SectionsMarcelo De Oliveira PredesNo ratings yet
- Transonic Flow Over WingsDocument21 pagesTransonic Flow Over Wingssiva_ksrNo ratings yet
- Vkumaran Roysoc97Document9 pagesVkumaran Roysoc97ghjgjNo ratings yet
- MHD Flow of Second Grade FluidDocument14 pagesMHD Flow of Second Grade FluidAzhar Ali ZafarNo ratings yet
- Vol1no4-7 RaiseeMDocument11 pagesVol1no4-7 RaiseeMSandra PowersNo ratings yet
- Maze Et Al RCD2004Document21 pagesMaze Et Al RCD2004Guillaume100% (1)
- S. Choi Et Al - Excitation Spectrum of Vortex Lattices in Rotating Bose-Einstein CondensatesDocument4 pagesS. Choi Et Al - Excitation Spectrum of Vortex Lattices in Rotating Bose-Einstein CondensatesLomewcxNo ratings yet
- Theory of Microwave Valves: International Series of Monographs on Electronics and InstrumentationFrom EverandTheory of Microwave Valves: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- N. Kerv : Synthesis Seismic Surface WavesDocument22 pagesN. Kerv : Synthesis Seismic Surface WavesNajeb PendiamanNo ratings yet
- IJMPA2013Document17 pagesIJMPA2013Gabriel MenezesNo ratings yet
- A Theory of Nonlinear Wave Loading On Offshore StructuresDocument25 pagesA Theory of Nonlinear Wave Loading On Offshore StructuresSyafiq HalimNo ratings yet
- Transition Radiation Emitted An Ultrarelativistic Particle Crossing A Curved Interface Between MediaDocument4 pagesTransition Radiation Emitted An Ultrarelativistic Particle Crossing A Curved Interface Between MediarijurahmanNo ratings yet
- 1960-Force and Moment Coefficients For Vibrating Aerofoils in CascadeDocument40 pages1960-Force and Moment Coefficients For Vibrating Aerofoils in Cascadesh1999No ratings yet
- Analysis of A Transitional Oscillatory Boundary Layer by K-ModelDocument8 pagesAnalysis of A Transitional Oscillatory Boundary Layer by K-ModelAhmad SanaNo ratings yet
- A Complex Variable Method For The Floating-Body Boundary-Value ProblemDocument14 pagesA Complex Variable Method For The Floating-Body Boundary-Value ProblemCarlos Edgardo Rodriguez BenitesNo ratings yet
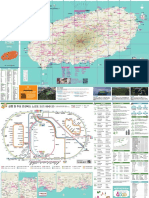
- Jeju Map KoreanDocument2 pagesJeju Map KoreanNoverdo SaputraNo ratings yet
- Discover Research at Ucl For Web 1Document3 pagesDiscover Research at Ucl For Web 1Noverdo SaputraNo ratings yet
- Critical Review of Floating Support Structures ForDocument12 pagesCritical Review of Floating Support Structures ForNoverdo SaputraNo ratings yet
- 2021 GKS-G Application Guidelines (English)Document42 pages2021 GKS-G Application Guidelines (English)Katrin R.No ratings yet
- Discover Research at Ucl For Web 1Document3 pagesDiscover Research at Ucl For Web 1Noverdo SaputraNo ratings yet
- Indonesia - Nationalisms After DecolonisationDocument22 pagesIndonesia - Nationalisms After DecolonisationEmil KledenNo ratings yet
- ChenJWWangZFAMK23-arXiv 2301.13713DiscretfxinCPFEMDocument29 pagesChenJWWangZFAMK23-arXiv 2301.13713DiscretfxinCPFEMNoverdo SaputraNo ratings yet
- 2020 GKS-G University Track 2nd Round Result: Successful CandidatesDocument27 pages2020 GKS-G University Track 2nd Round Result: Successful Candidatesdelvisupiani100% (1)
- Comparison of The Characteristics of LDPE: PP and HDPE: PP Polymer BlendsDocument11 pagesComparison of The Characteristics of LDPE: PP and HDPE: PP Polymer BlendsNoverdo SaputraNo ratings yet
- Fatigue of Top Chain of Mooring Lines Due To Bending: Knowledge Base ArticleDocument4 pagesFatigue of Top Chain of Mooring Lines Due To Bending: Knowledge Base ArticleNoverdo SaputraNo ratings yet
- GKS 2021 Uni Track DataDocument3 pagesGKS 2021 Uni Track DataNoverdo SaputraNo ratings yet
- 2019 - JCM - Natural Fiber Composites With NingDocument11 pages2019 - JCM - Natural Fiber Composites With NingNoverdo SaputraNo ratings yet
- Critical Review of Floating Support Structures ForDocument12 pagesCritical Review of Floating Support Structures ForNoverdo SaputraNo ratings yet
- Long Term Awards Intake 2020 (Low Res)Document137 pagesLong Term Awards Intake 2020 (Low Res)dimaspe7No ratings yet
- (Vol II), 2019 Rules For Hull, 2019Document694 pages(Vol II), 2019 Rules For Hull, 2019Osvaldo SimanjuntakNo ratings yet
- 23 Mooring Analysis During ShorepullDocument53 pages23 Mooring Analysis During ShorepullNoverdo Saputra100% (1)
- 2017 4 3 2 KastenmeierDocument16 pages2017 4 3 2 KastenmeierNoverdo SaputraNo ratings yet
- Introduction Double Degree Program Dona Its Mnu CutDocument14 pagesIntroduction Double Degree Program Dona Its Mnu CutNoverdo SaputraNo ratings yet
- Astm D5947 06 Standard Test Methods For Physical Dimensions of Solid Plastics SpecimensDocument11 pagesAstm D5947 06 Standard Test Methods For Physical Dimensions of Solid Plastics SpecimensAnonymous qmuFcaw13No ratings yet
- 2019 - JCM - Natural Fiber Composites With NingDocument11 pages2019 - JCM - Natural Fiber Composites With NingNoverdo SaputraNo ratings yet
- 2020 Fees Post July 2009Document1 page2020 Fees Post July 2009Noverdo SaputraNo ratings yet
- Long Term Awards Intake 2020 (Low Res)Document137 pagesLong Term Awards Intake 2020 (Low Res)dimaspe7No ratings yet
- 01 Astm d256 PDFDocument20 pages01 Astm d256 PDFSunny BhatiaNo ratings yet
- 2021 GKS-G Available Universities & Fields of Study (English)Document182 pages2021 GKS-G Available Universities & Fields of Study (English)Noverdo Saputra0% (2)
- Methods For Removing of Phosphates From WastewaterDocument7 pagesMethods For Removing of Phosphates From WastewaterNoverdo SaputraNo ratings yet
- Fatigue Testing of Semi Structural Composite MaterialsDocument12 pagesFatigue Testing of Semi Structural Composite MaterialsNoverdo SaputraNo ratings yet
- Astm d5946-04 Medicion Tratamiento CoronaDocument6 pagesAstm d5946-04 Medicion Tratamiento CoronaKattia Jhoana Martinez Sanjinez100% (1)
- ASTM D5947-06 Standard Test Methods For Physical Dimensions of Solid Plastics SpecimensDocument3 pagesASTM D5947-06 Standard Test Methods For Physical Dimensions of Solid Plastics Specimenscassiader0% (2)
- Astm d638 vsd3039Document2 pagesAstm d638 vsd3039kmurty60100% (1)
- Watson ATreatiseOnTheTheoryOfBesselFunctions Text PDFDocument815 pagesWatson ATreatiseOnTheTheoryOfBesselFunctions Text PDFزكرياء بنحيرت100% (1)
- MMP-II, Course Outline Spring 2019Document3 pagesMMP-II, Course Outline Spring 2019Ehsan AdeebNo ratings yet
- Bessel FunctionDocument31 pagesBessel FunctionponsepoyNo ratings yet
- B.SC Maths II YearDocument10 pagesB.SC Maths II YearShambaditya GhoshNo ratings yet
- Documents - MX - Aden Kerker Scattering Efficiency For A Layered Sphere 1951 PDFDocument6 pagesDocuments - MX - Aden Kerker Scattering Efficiency For A Layered Sphere 1951 PDFAparna ViswanathNo ratings yet
- Syllabii S&H2019 20 PDFDocument22 pagesSyllabii S&H2019 20 PDFEshan ParekhNo ratings yet
- Mathematical Physics-II Lab Core 5Document26 pagesMathematical Physics-II Lab Core 5Krutika Kedar RoutrayNo ratings yet
- M Sc-Physics PDFDocument55 pagesM Sc-Physics PDFRobin Kerenzz AbiezzNo ratings yet
- CssDocument18 pagesCssAbdul Fatir KhanNo ratings yet
- CRCMAthTables PDFDocument634 pagesCRCMAthTables PDFRosemond FabienNo ratings yet
- New Method For Highly Accurate Calculations of The Photodetachment Cross-Sections of The Negatively Charged Hydrogen IonsDocument23 pagesNew Method For Highly Accurate Calculations of The Photodetachment Cross-Sections of The Negatively Charged Hydrogen IonsAlejandro PosadaNo ratings yet
- Integral Transforms and Their ApplicationsDocument427 pagesIntegral Transforms and Their ApplicationsZarqa Mirani100% (3)
- Bessel Function ZeroesDocument5 pagesBessel Function Zeroesputin208No ratings yet
- Whispering Gallery Mode Microresonators - Fundamentals and ApplicationsDocument54 pagesWhispering Gallery Mode Microresonators - Fundamentals and ApplicationsDannyNo ratings yet
- Solution of Differential EquationsDocument34 pagesSolution of Differential EquationsSaddie SoulaNo ratings yet
- Cse Iv Engineering Mathematics Iv 10mat41 Notes PDFDocument132 pagesCse Iv Engineering Mathematics Iv 10mat41 Notes PDFSNEHANo ratings yet
- L6 Scattering PartialWavesDocument19 pagesL6 Scattering PartialWavesdwyphy100% (1)
- Chiang C Mei-Mathematical Analysis in Engineering - How To Use The Basic Tools-Cambridge University Press (1995)Document479 pagesChiang C Mei-Mathematical Analysis in Engineering - How To Use The Basic Tools-Cambridge University Press (1995)SudersanSridhar100% (1)
- MATH0056 (Mathematical Methods 4)Document2 pagesMATH0056 (Mathematical Methods 4)Roy VeseyNo ratings yet
- Math CadDocument480 pagesMath Cadrebelion1310No ratings yet
- Gopal A Krishnan 06Document168 pagesGopal A Krishnan 06khitishNo ratings yet
- Exponential and LogarithmDocument74 pagesExponential and LogarithmAwoke ZegeyeNo ratings yet
- Series So LN NotebookDocument47 pagesSeries So LN NotebookSulabh KumarNo ratings yet
- Series Representation of The Modified Bessel FunctDocument6 pagesSeries Representation of The Modified Bessel FunctMateo PazNo ratings yet
- Outline CD 2Document9 pagesOutline CD 2Imdadul HaqueNo ratings yet
- Applied Mathematics of Fluid Flow in Porous MediaDocument94 pagesApplied Mathematics of Fluid Flow in Porous MediavajrahastaNo ratings yet
- NSIDPG ENG Petroleum Engineering Jan 2019Document6 pagesNSIDPG ENG Petroleum Engineering Jan 2019Mohamed-DeqSabriyeNo ratings yet
- Series Solutions-Frobenius' Method: Example: Linear OscillatorDocument5 pagesSeries Solutions-Frobenius' Method: Example: Linear Oscillatorferwa shoukatNo ratings yet
- SPE 81043 Exact Solution of Two Layer Reservoir With Crossflow Under Constant Pressure ConditionDocument6 pagesSPE 81043 Exact Solution of Two Layer Reservoir With Crossflow Under Constant Pressure ConditionWaleed Barakat MariaNo ratings yet
- Css Course OutlineDocument10 pagesCss Course OutlineUmar IsrarNo ratings yet