You might also like
- Tesla HexaconDocument58 pagesTesla HexaconCruizByte Mobility Solutions Private LimitedNo ratings yet
- Calculation of Pipe SupportDocument6 pagesCalculation of Pipe Supportnaveen_86No ratings yet
- Weekly Progress Report PDFDocument7 pagesWeekly Progress Report PDFHeak Hor50% (2)
- USB MIDI Controller With Arduino LeonardoDocument18 pagesUSB MIDI Controller With Arduino LeonardoleoNo ratings yet
- Arduino TITO and Player Tracking Project - DocumentationDocument21 pagesArduino TITO and Player Tracking Project - DocumentationOscar Javier GomezNo ratings yet
- NRF24L01 Arduino Interfacing - Wireless Communication1Document24 pagesNRF24L01 Arduino Interfacing - Wireless Communication1Kishore Vennela0% (1)
- Installing The RU PC-TOOL: Note UDocument1 pageInstalling The RU PC-TOOL: Note UsegurahNo ratings yet
- All About Immanuel KantDocument20 pagesAll About Immanuel KantSean ChoNo ratings yet
- Glazing Risk AssessmentDocument6 pagesGlazing Risk AssessmentKaren OlivierNo ratings yet
- Mini CNC Machine Project ReportDocument32 pagesMini CNC Machine Project ReportNaimish Sukhadeve83% (6)
- Tutorial 16 - 128x64 ST7920 Graphical - Dot-Matrix SPI LCDDocument8 pagesTutorial 16 - 128x64 ST7920 Graphical - Dot-Matrix SPI LCDCarlos Rojas TezenNo ratings yet
- STULZ Controller Communication Manual OCU0147 PDFDocument28 pagesSTULZ Controller Communication Manual OCU0147 PDFdivadlqNo ratings yet
- Data Communication and Computer NetworksDocument105 pagesData Communication and Computer NetworksTalha HashmiNo ratings yet
- Les Lac Inset Monitoring FormDocument57 pagesLes Lac Inset Monitoring FormKim Sang AhNo ratings yet
- Arduino Keypad and LCD Interfacing With Code - Ee-DiaryDocument5 pagesArduino Keypad and LCD Interfacing With Code - Ee-DiaryMustapha BaruwaNo ratings yet
- STULZ Controller Communication Manual OCU0147Document27 pagesSTULZ Controller Communication Manual OCU0147nam nguyenNo ratings yet
- BotboarduinomanualDocument8 pagesBotboarduinomanualAlvaroNo ratings yet
- BCD To 7-Segment Display Decoder - Electronics PostDocument3 pagesBCD To 7-Segment Display Decoder - Electronics PostDurga DeviNo ratings yet
- Orca Share Media1617078034640 6782516869006267082Document16 pagesOrca Share Media1617078034640 6782516869006267082Pocong NiñaNo ratings yet
- STULZ Controller Communication Manual OCU0147Document28 pagesSTULZ Controller Communication Manual OCU0147Baltik2672100% (3)
- PEAK-gridARM HWMan EngDocument51 pagesPEAK-gridARM HWMan EngJhon TerryNo ratings yet
- Datasheet 1038 Ver1.2Document6 pagesDatasheet 1038 Ver1.2Sam SamiNo ratings yet
- A Powerful Graphic Liquid Crystal Display: Column #47, March 1999 by Lon GlaznerDocument16 pagesA Powerful Graphic Liquid Crystal Display: Column #47, March 1999 by Lon GlaznerVijay P PulavarthiNo ratings yet
- Siemens S7 200Document6 pagesSiemens S7 200lela janNo ratings yet
- App 1238 PDFDocument3 pagesApp 1238 PDFIBRNo ratings yet
- I2C2PC BluetoothDocument5 pagesI2C2PC BluetoothSon VuNo ratings yet
- BASIC Stamp GuideDocument25 pagesBASIC Stamp GuideDodge WorthingtonNo ratings yet
- Sheet Sheet Sheet Sheet Title Title Title TitleDocument47 pagesSheet Sheet Sheet Sheet Title Title Title TitlesousalrNo ratings yet
- CDKR Web v0.2rcDocument3 pagesCDKR Web v0.2rcAGUSTIN SEVERINONo ratings yet
- NRF24L01 Arduino Interfacing - Wireless Communication1 PDFDocument24 pagesNRF24L01 Arduino Interfacing - Wireless Communication1 PDFKishore VennelaNo ratings yet
- Pmodad2 RMDocument2 pagesPmodad2 RMsergioNo ratings yet
- School of Electronics EngineeringDocument160 pagesSchool of Electronics EngineeringWINORLOSE100% (2)
- MODULE-5: Interfacing: Microcontroller Notes:18EE52Document51 pagesMODULE-5: Interfacing: Microcontroller Notes:18EE52SuprithaNo ratings yet
- User Manual: Led ProDocument28 pagesUser Manual: Led ProRanNo ratings yet
- Yaesu FT-8x7 DIY Bluetooth-CAT Micro-Miniature InterfaceDocument5 pagesYaesu FT-8x7 DIY Bluetooth-CAT Micro-Miniature InterfaceLolerNo ratings yet
- TD Arduino PDFDocument27 pagesTD Arduino PDFtayari_lNo ratings yet
- MEEN 652 Ball-Plate Balancer Manual: The SystemDocument27 pagesMEEN 652 Ball-Plate Balancer Manual: The SystemAbhay JangirNo ratings yet
- Visual Basic Communications #1Document5 pagesVisual Basic Communications #1rukati shojaNo ratings yet
- PC Control CableDocument1 pagePC Control CableChong LoyNo ratings yet
- 2.13inch E-Paper DatasheetDocument26 pages2.13inch E-Paper Datasheetvjspd hppNo ratings yet
- LCD and Keyboard Interfacing: Unit VDocument21 pagesLCD and Keyboard Interfacing: Unit VrushitaaNo ratings yet
- Manual de La Placa UNI-DS3 ArchivoDocument60 pagesManual de La Placa UNI-DS3 ArchivoCarlos Roman ZarzaNo ratings yet
- Development Kit For E-Paper Display: Dalian Good Display Co., LTDDocument14 pagesDevelopment Kit For E-Paper Display: Dalian Good Display Co., LTDjhonatan cock100% (1)
- DLD E8 1Document10 pagesDLD E8 1Jahnavi NallapareddyNo ratings yet
- CardBus распиновка и описание at pinouts PDFDocument6 pagesCardBus распиновка и описание at pinouts PDFadfasfNo ratings yet
- 5601 Edge Connector Breakout Board For The BBC Microbit Datasheet v1 2Document3 pages5601 Edge Connector Breakout Board For The BBC Microbit Datasheet v1 2dborcic61No ratings yet
- Iot MajrrDocument25 pagesIot MajrrSrinivas ReddyNo ratings yet
- Matlab-Based Graphical User Interface Development For Basic Stamp 2 Microcontroller ProjectsDocument20 pagesMatlab-Based Graphical User Interface Development For Basic Stamp 2 Microcontroller ProjectsAleksander AliajNo ratings yet
- Alexander Meier USB-Programming Interface For Yaesu VX-2Document3 pagesAlexander Meier USB-Programming Interface For Yaesu VX-2Renan ValenteNo ratings yet
- Experiment 3 ACA PDFDocument11 pagesExperiment 3 ACA PDFaakash dabasNo ratings yet
- Adafruit Mcp23017 I2c Gpio ExpanderDocument21 pagesAdafruit Mcp23017 I2c Gpio Expanderdiamondnavy91No ratings yet
- NKC Electronics TutorialsDocument29 pagesNKC Electronics TutorialsMC. Rene Solis R.No ratings yet
- Electronic Dice Using At89C2051: IdeasDocument2 pagesElectronic Dice Using At89C2051: IdeaschakralabsNo ratings yet
- Netro Catalog 2019 V2Document63 pagesNetro Catalog 2019 V2kudaNo ratings yet
- Arduino Voodoo AdapterDocument4 pagesArduino Voodoo AdapterVasilis RiderNo ratings yet
- Aec IspDocument3 pagesAec Ispapi-3808344No ratings yet
- DELTA IA-MDS VFD-C-Optional-CMC-PD01 OM EN 20110628Document34 pagesDELTA IA-MDS VFD-C-Optional-CMC-PD01 OM EN 20110628ASI JOBNo ratings yet
- Post Card MiniPCI MiniPCIEDocument7 pagesPost Card MiniPCI MiniPCIEFranco Córdoba CorvalánNo ratings yet
- How To Make 3D Printed LaptopDocument11 pagesHow To Make 3D Printed LaptopHamza Sadaqa100% (1)
- 2-Wire LCD Interface For The PICMicroDocument4 pages2-Wire LCD Interface For The PICMicroGaurav Joshi100% (2)
- Extensions: About This PageDocument28 pagesExtensions: About This PageGiannis KavathasNo ratings yet
- Microprocessor and Interfacing Lab Eee 424, Sec: A: ProjectDocument8 pagesMicroprocessor and Interfacing Lab Eee 424, Sec: A: ProjectMahmudul HasanNo ratings yet
- 017 Android Based Digital Notice Board P10Document49 pages017 Android Based Digital Notice Board P10Suvarna LangadeNo ratings yet
- PIC 16F877A Tutorials For Pitt Robotics ClubDocument26 pagesPIC 16F877A Tutorials For Pitt Robotics ClubAdriano GazzolliNo ratings yet
- Atmega328 Arduino UnoDocument29 pagesAtmega328 Arduino Unoanthoniusokoti004No ratings yet
- A Computational Investigation Into Rate-Dependant VectorcardiogramDocument13 pagesA Computational Investigation Into Rate-Dependant VectorcardiogramsegurahNo ratings yet
- Implants and Their Use in Beef Cattle Production Oklahoma State UniversityDocument26 pagesImplants and Their Use in Beef Cattle Production Oklahoma State UniversitysegurahNo ratings yet
- P38 Door Latch TestsDocument2 pagesP38 Door Latch TestssegurahNo ratings yet
- Manual CHARAK DDDRDocument80 pagesManual CHARAK DDDRsegurahNo ratings yet
- Casio pg380 Players ManualDocument27 pagesCasio pg380 Players ManualsegurahNo ratings yet
- Casio PG380 Capacitor ReplacementDocument4 pagesCasio PG380 Capacitor ReplacementsegurahNo ratings yet
- Help Troubleshooting MIDI Receive Circuit. - Audio - Arduino Forum OptoacopladorDocument6 pagesHelp Troubleshooting MIDI Receive Circuit. - Audio - Arduino Forum OptoacopladorsegurahNo ratings yet
- Manual Pinnacle SeriesDocument77 pagesManual Pinnacle SeriessegurahNo ratings yet
- Opto-Couple Confusion - 6N137 or 6N138 - Gr33nonline Arduino MidiDocument10 pagesOpto-Couple Confusion - 6N137 or 6N138 - Gr33nonline Arduino MidisegurahNo ratings yet
- DVTK Storage SCP Emulator User ManualDocument20 pagesDVTK Storage SCP Emulator User Manualsegurah0% (1)
- DICOM Network Analyzer User ManualDocument22 pagesDICOM Network Analyzer User ManualsegurahNo ratings yet
- DVTK Storage SCU Emulator User ManualDocument16 pagesDVTK Storage SCU Emulator User ManualsegurahNo ratings yet
- DVTK DICOM Anonymizer User ManualDocument14 pagesDVTK DICOM Anonymizer User ManualsegurahNo ratings yet
- DVTK QR SCP Emulator User ManualDocument20 pagesDVTK QR SCP Emulator User ManualsegurahNo ratings yet
- DICOM Editor Tool User ManualDocument20 pagesDICOM Editor Tool User ManualsegurahNo ratings yet
- Gluster History - PDVSADocument4 pagesGluster History - PDVSAsegurahNo ratings yet
- Shared Mime Info SpecDocument18 pagesShared Mime Info SpecsegurahNo ratings yet
- Gluter Value - 136MM USDDocument5 pagesGluter Value - 136MM USDsegurahNo ratings yet
- Computer-Aided Melody Note Transcription Using The Tony Software: Accuracy and EfficiencyDocument9 pagesComputer-Aided Melody Note Transcription Using The Tony Software: Accuracy and EfficiencysegurahNo ratings yet
- Postcard2 StudentsbookDocument144 pagesPostcard2 StudentsbooksegurahNo ratings yet
- MicroStructPy A Statistical Microstructure Mesh GeDocument6 pagesMicroStructPy A Statistical Microstructure Mesh GeMike JohanssenNo ratings yet
- lmp91000 PDFDocument31 pageslmp91000 PDFJoão CostaNo ratings yet
- Tapiwa Steve Mandaa - 165070 - Assignsubmission - File - Innovation Management Paper DraftDocument7 pagesTapiwa Steve Mandaa - 165070 - Assignsubmission - File - Innovation Management Paper DraftTapiwaNo ratings yet
- The Awakening Study Guide AnswersDocument24 pagesThe Awakening Study Guide AnswersAli RidhaNo ratings yet
- Physics Notes AJk 9th Class Chap6Document3 pagesPhysics Notes AJk 9th Class Chap6Khizer Tariq QureshiNo ratings yet
- Accomplishment Report: Gubat National High SchoolDocument2 pagesAccomplishment Report: Gubat National High SchoolSheila Divinagracia - EscobedoNo ratings yet
- Improving Orientation With Yoked PrismDocument2 pagesImproving Orientation With Yoked PrismAlexsandro HelenoNo ratings yet
- Chart-5050 by Songram BMA 54thDocument4 pagesChart-5050 by Songram BMA 54thMd. Noor HasanNo ratings yet
- Weforma WBZ ENDocument18 pagesWeforma WBZ ENRuben PauwelsNo ratings yet
- ADMModule - STEM - GP12EU Ia 7Document27 pagesADMModule - STEM - GP12EU Ia 7Jel SuarezNo ratings yet
- A User Guide For FORTRAN 90-95-0Document19 pagesA User Guide For FORTRAN 90-95-0Anonymous IF3H0X2vBeNo ratings yet
- Anaphy Lec 1Document2 pagesAnaphy Lec 1Kiana SanchezNo ratings yet
- YaskawaDocument54 pagesYaskawaPer Sverre DacolNo ratings yet
- Grade 8 RespirationDocument6 pagesGrade 8 RespirationShanel WisdomNo ratings yet
- Contoh RPHDocument2 pagesContoh RPHAhmad FawwazNo ratings yet
- 33198Document8 pages33198tatacpsNo ratings yet
- Or Or: Correlation Between Carbon Residue and Molecular WeightDocument4 pagesOr Or: Correlation Between Carbon Residue and Molecular WeightNiranjana Murthy PNo ratings yet
- Payaman KamiDocument35 pagesPayaman Kamifaye tamayoNo ratings yet
- HFAss 6Document1 pageHFAss 6Taieb Ben ThabetNo ratings yet
- An Isolated Bridge Boost Converter With Active Soft SwitchingDocument8 pagesAn Isolated Bridge Boost Converter With Active Soft SwitchingJie99No ratings yet
- Wood Support-Micro Guard Product DataDocument13 pagesWood Support-Micro Guard Product DataM. Murat ErginNo ratings yet
- Environmental Accounting From The New Institutional Sociology Theory Lens: Branding or Responsibility?Document16 pagesEnvironmental Accounting From The New Institutional Sociology Theory Lens: Branding or Responsibility?abcdefghijklmnNo ratings yet
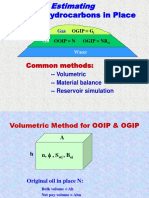
- Ooip Volume MbeDocument19 pagesOoip Volume Mbefoxnew11No ratings yet
- Ericsson - Cell PlanningDocument5 pagesEricsson - Cell PlanningBassem AbouamerNo ratings yet
- He 2011Document11 pagesHe 2011DarshilNo ratings yet