You might also like
- Complex Line Numbers in Isometrics - Process Design, From The OutsideDocument8 pagesComplex Line Numbers in Isometrics - Process Design, From The OutsideLANKAPALLISURI100% (1)
- AutoPIPE Release HighlightsDocument59 pagesAutoPIPE Release HighlightsSongAn BuiNo ratings yet
- Asian Epoxy HB CoatingDocument1 pageAsian Epoxy HB CoatingNS2 Engineering and ConstructionNo ratings yet
- Caesar Ii: Applications GuideDocument279 pagesCaesar Ii: Applications GuidePatranNo ratings yet
- The Ultimate Guide To Object DetectionDocument16 pagesThe Ultimate Guide To Object Detectionadalberto soplatetasNo ratings yet
- Zinc Silicate Primer Product Data SheetDocument6 pagesZinc Silicate Primer Product Data SheetTrịnh Minh KhoaNo ratings yet
- c2 Static Load Case EditorDocument22 pagesc2 Static Load Case EditorChristopher Brown100% (1)
- 9 Static Output ProcessorDocument53 pages9 Static Output ProcessorThiên KhánhNo ratings yet
- Calculation ResultDocument18 pagesCalculation ResultAwahida WidiNo ratings yet
- Polaris Pipe CatalogDocument24 pagesPolaris Pipe CatalogMinh Thắng ĐỗNo ratings yet
- AutoCad Map 3D 2008 - .NET Developer's GuideDocument96 pagesAutoCad Map 3D 2008 - .NET Developer's GuideAnderson Roberto da SilvaNo ratings yet
- S 000 13a0 0001P - 2Document63 pagesS 000 13a0 0001P - 2Raul L. Zamorano FerrerNo ratings yet
- Load Spec To AutoCAD Plant 3D PDFDocument4 pagesLoad Spec To AutoCAD Plant 3D PDFluiskar985No ratings yet
- Seismic AnalysisDocument4 pagesSeismic AnalysisAnkithNo ratings yet
- Smartplant P&Id Insulation Manager: User'S GuideDocument30 pagesSmartplant P&Id Insulation Manager: User'S GuideAnand KumarNo ratings yet
- Lab Report 11Document8 pagesLab Report 11Umer GillNo ratings yet
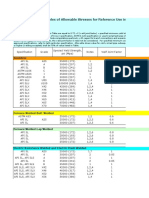
- Allowable Stress in PipingDocument6 pagesAllowable Stress in PipingpelotoNo ratings yet
- Design Document For An Object Detection Application Using OpenCVDocument14 pagesDesign Document For An Object Detection Application Using OpenCVAMEEMA ARIFNo ratings yet
- Insulation Audit Guide Saves Energy CostsDocument44 pagesInsulation Audit Guide Saves Energy CostsahmedalishNo ratings yet
- HDM-250 Manual - 042808Document35 pagesHDM-250 Manual - 042808Hakkı YılmazNo ratings yet
- Stress Range Histories and Rain FlowcountingDocument13 pagesStress Range Histories and Rain FlowcountingM AYGULNo ratings yet
- Using Plant 3D in A State Plane Coordinate Project EnvironmentDocument12 pagesUsing Plant 3D in A State Plane Coordinate Project EnvironmentRoobens SC LaraNo ratings yet
- Cold SpringingDocument5 pagesCold SpringingYakulitoNo ratings yet
- 0000 A0 060 Cal 0001Document418 pages0000 A0 060 Cal 0001vignesh558855No ratings yet
- ISO Troubleshooting Guide for Stress AnalysisDocument31 pagesISO Troubleshooting Guide for Stress AnalysisDarren Kam100% (1)
- InTech-Guidelines For Transient Analysis in Water Transmission and Distribution SystemsDocument22 pagesInTech-Guidelines For Transient Analysis in Water Transmission and Distribution Systemsuserscribd2011100% (1)
- Flexibility and Stress Analysis of Piping System Using Caesar II Case Study IJERTV3IS060582Document5 pagesFlexibility and Stress Analysis of Piping System Using Caesar II Case Study IJERTV3IS060582muhammad0umar-4100% (1)
- The Art of Designing Pipe Support SystemsDocument6 pagesThe Art of Designing Pipe Support SystemsguluuNo ratings yet
- Caesar II FaqsDocument18 pagesCaesar II FaqsVolodymyr Pryz100% (1)
- Select Corrosion Paint SystemDocument33 pagesSelect Corrosion Paint SystemFernandoNo ratings yet
- CAESAR II Pipe Stress Analysis GuideDocument37 pagesCAESAR II Pipe Stress Analysis GuideEko Idris Hutagaol100% (1)
- Behind The Face-Tips and Tricks in Autocad Plant 3D: DescriptionDocument18 pagesBehind The Face-Tips and Tricks in Autocad Plant 3D: Descriptionjignesh chauhanNo ratings yet
- Caepipe-To-Caesar-Ii: User's ManualDocument95 pagesCaepipe-To-Caesar-Ii: User's ManualSnehasish Mukherjee100% (1)
- TS4 - Project and Maintenance Coating PDFDocument26 pagesTS4 - Project and Maintenance Coating PDFmojgfdNo ratings yet
- Standard Paint Specification Rev 1-2-24!09!14Document3 pagesStandard Paint Specification Rev 1-2-24!09!14Puji RahmawatiNo ratings yet
- 3E Plus Energy Appraisal SpreadsheetDocument5 pages3E Plus Energy Appraisal SpreadsheetDan McCoolNo ratings yet
- Stress Engineer SampleDocument11 pagesStress Engineer SampleHariharan GovindarajNo ratings yet
- MSSSP91 96Document12 pagesMSSSP91 96Anonymous cuOIjrLINo ratings yet
- LIFT OFF ModuleDocument28 pagesLIFT OFF ModulericardoNo ratings yet
- Autocad Plant3d Quick Reference GuideDocument2 pagesAutocad Plant3d Quick Reference GuideashrafNo ratings yet
- SP3D Object Search User Manual Rev4 PDFDocument44 pagesSP3D Object Search User Manual Rev4 PDFSrinivasan SeenuNo ratings yet
- Iso12944 Technical PaperDocument10 pagesIso12944 Technical PaperGuillermo Arnulfo Villa Garay100% (1)
- Automatic Line Lists From AutoCAD P&IDProcess Design, From The Outside - Process Design, From The OutsideDocument6 pagesAutomatic Line Lists From AutoCAD P&IDProcess Design, From The Outside - Process Design, From The OutsideTiago FerreiraNo ratings yet
- Purge AutoCAD Plant 3D Local Data CacheDocument1 pagePurge AutoCAD Plant 3D Local Data CachecheesecheeeseNo ratings yet
- A Recommended Approach To Piping Flexibility StudiesDocument12 pagesA Recommended Approach To Piping Flexibility StudiesbbmokshNo ratings yet
- Lapox AR-101: Technical Data Sheet - Polymers BusinessDocument2 pagesLapox AR-101: Technical Data Sheet - Polymers Businesssriatul2006No ratings yet
- Kagira Drawing Solution: Smart Plant 3DDocument4 pagesKagira Drawing Solution: Smart Plant 3DKagira Drawing SoltuionNo ratings yet
- Hempel's Curing Agent 9705000000 En-GbDocument10 pagesHempel's Curing Agent 9705000000 En-GbfaizalNo ratings yet
- Valve Types and Characteristics Comparison ChartDocument2 pagesValve Types and Characteristics Comparison Charttylerstearns100% (1)
- CAESAR II NonconvergenceDocument11 pagesCAESAR II NonconvergenceJohn BrindleyNo ratings yet
- Piping FittingsDocument21 pagesPiping Fittingshirenkumar patelNo ratings yet
- Water Hammer in Piping System-Part 2Document9 pagesWater Hammer in Piping System-Part 2Việt Đặng XuânNo ratings yet
- Practical Design Approaches for Pressure Vessels and Heat ExchangersDocument10 pagesPractical Design Approaches for Pressure Vessels and Heat ExchangersballisnothingNo ratings yet
- Fatigue Analysis Using CAESAR IIDocument7 pagesFatigue Analysis Using CAESAR IIayoungaNo ratings yet
- Using Parameters in ANSYSDocument38 pagesUsing Parameters in ANSYSNam VoNo ratings yet
- Calculate max allowable piping pressure using ASME B31.3Document9 pagesCalculate max allowable piping pressure using ASME B31.3RamuAlagappanNo ratings yet
- Planttools: Optimize Your Workflow For Autocad Plant 3DDocument34 pagesPlanttools: Optimize Your Workflow For Autocad Plant 3DPhạm LinhNo ratings yet
- Rich Feature Hierarchies For Accurate Object Detection and Semantic SegmentationDocument8 pagesRich Feature Hierarchies For Accurate Object Detection and Semantic Segmentationyadavghyam2001No ratings yet
- Matecconf dts2017 05005Document4 pagesMatecconf dts2017 05005ThuThao NguyenNo ratings yet
- R-CNN Pedestrian Detection with Class-Specific Region ProposalsDocument4 pagesR-CNN Pedestrian Detection with Class-Specific Region ProposalsAkshay KagwadeNo ratings yet
- Critical analysis of Kotter's change management frameworkDocument24 pagesCritical analysis of Kotter's change management frameworkAobakwe N. KeaitseNo ratings yet
- Probability and Statistics: B Madhav Reddy Madhav.b@srmap - Edu.inDocument15 pagesProbability and Statistics: B Madhav Reddy Madhav.b@srmap - Edu.inSajan KumarNo ratings yet
- How To Think DifferentlyDocument2 pagesHow To Think DifferentlyAnonymous pTqpiqbdNo ratings yet
- A Completely Real Time Approach To Process Control Education PDFDocument4 pagesA Completely Real Time Approach To Process Control Education PDFkayeNo ratings yet
- CbsuaDocument3 pagesCbsuaCATHERINE LABARONo ratings yet
- Chapter 3 - OrganizingDocument2 pagesChapter 3 - Organizingsalmaik25% (4)
- Lesson Plan CritiqueDocument3 pagesLesson Plan Critiqueapi-357257220No ratings yet
- Self-Designed Experience ProposalDocument7 pagesSelf-Designed Experience Proposalapi-295927147No ratings yet
- NASA's Manned Space Flight ProgramDocument127 pagesNASA's Manned Space Flight ProgramBob AndrepontNo ratings yet
- What Are The Considerations For Selecting The PHD Topic For A ProjectDocument3 pagesWhat Are The Considerations For Selecting The PHD Topic For A ProjectPhd AssistanceNo ratings yet
- Expert Systems With Applications: Bhawana Sharma, Lokesh Sharma, Chhagan Lal, Satyabrata RoyDocument16 pagesExpert Systems With Applications: Bhawana Sharma, Lokesh Sharma, Chhagan Lal, Satyabrata Royhrishabkakoty21No ratings yet
- 2006-11-13 (Employability - KSR College)Document26 pages2006-11-13 (Employability - KSR College)Krishnamurthy Prabhakar100% (2)
- Introduction To Johari WindowDocument3 pagesIntroduction To Johari Windowsudhir letv100% (1)
- Factors Affecting The Adoption and Usage of Egovernment Services in LibyaDocument25 pagesFactors Affecting The Adoption and Usage of Egovernment Services in LibyaAbNo ratings yet
- Nosocomial Infections: Knowledge and Source of Information Among Clinical Health Care Students in GhanaDocument5 pagesNosocomial Infections: Knowledge and Source of Information Among Clinical Health Care Students in GhanalulukzNo ratings yet
- Strategy The Strategic AuditDocument3 pagesStrategy The Strategic AuditLê Ngọc TúNo ratings yet
- SLcomparative Study IA Sample-2Document2 pagesSLcomparative Study IA Sample-2sheelvanthNo ratings yet
- Journal of Creative Behavior - 2021 - Ivcevic - The Creativity Dare Attitudes Toward Creativity and Prediction of CreativeDocument19 pagesJournal of Creative Behavior - 2021 - Ivcevic - The Creativity Dare Attitudes Toward Creativity and Prediction of CreativehNo ratings yet
- CPDProvider Nurseupdated 061819Document36 pagesCPDProvider Nurseupdated 061819Joyce Quiñones-LadraNo ratings yet
- Research 2 Module 1 Week 1 - 2021Document8 pagesResearch 2 Module 1 Week 1 - 2021Dabymalou Sapu-anNo ratings yet
- Applications of Econometrics Group Project 2016Document18 pagesApplications of Econometrics Group Project 2016Anton BochkovNo ratings yet
- Scarcity and Surfeit - The Ecology of Africa's Conflicts - Disasters and (PDFDrive)Document398 pagesScarcity and Surfeit - The Ecology of Africa's Conflicts - Disasters and (PDFDrive)Pier WelsNo ratings yet
- Elementary StatDocument15 pagesElementary StatGeralyn T. FamilganNo ratings yet
- Beta Testing SlidesDocument14 pagesBeta Testing SlidesNeoNo ratings yet
- Indonesia Millennial Report 2024Document102 pagesIndonesia Millennial Report 2024spamformahyaNo ratings yet
- Lift Design Studyies01Document22 pagesLift Design Studyies01Omid7686No ratings yet
- Civil Engg - FDP - Brochure - NIT Andhra - Earthquake GeotechnicsDocument2 pagesCivil Engg - FDP - Brochure - NIT Andhra - Earthquake GeotechnicsSai PavanNo ratings yet
- ICH GCP Guidelines ExplainedDocument18 pagesICH GCP Guidelines ExplainedMeenakshi HandaNo ratings yet
- Hiren Patel ResumeDocument2 pagesHiren Patel ResumeHiren PatelNo ratings yet
- Journal of Primary Education: Zakiyah Ismuwardani, Agus Nuryatin & Mukh DoyinDocument8 pagesJournal of Primary Education: Zakiyah Ismuwardani, Agus Nuryatin & Mukh DoyinMusisiNo ratings yet