You might also like
- Red Triangle Productions LLC - Class Notes For Airbus A320: Phases of FlightDocument15 pagesRed Triangle Productions LLC - Class Notes For Airbus A320: Phases of FlightMa Jo100% (3)
- Shell Momentum BalanceDocument59 pagesShell Momentum BalanceAndres OrtegaNo ratings yet
- Graph TheoryDocument6 pagesGraph Theoryvipin3196No ratings yet
- Analysis of Structures Subjected To Random Loading Using The Transfer Matrix or Numerical Integration Methods 1992Document4 pagesAnalysis of Structures Subjected To Random Loading Using The Transfer Matrix or Numerical Integration Methods 1992ciscoNo ratings yet
- Level Flight Performance and Level Flight EnvelopeDocument13 pagesLevel Flight Performance and Level Flight EnvelopeSai Lung WongNo ratings yet
- Turning FlightDocument12 pagesTurning FlightD ARUL KUMARESANNo ratings yet
- Subsonic Compress Ible Flow Over Air FoilsDocument3 pagesSubsonic Compress Ible Flow Over Air FoilsRidwan FadlikaNo ratings yet
- Elements of Gasdynamics Liepman PDFDocument232 pagesElements of Gasdynamics Liepman PDFprasannabalaji100% (1)
- Chapter 3Document36 pagesChapter 3Gavin MandNo ratings yet
- Continuity Equation - Differential Form: DerivationDocument15 pagesContinuity Equation - Differential Form: Derivationprasanth_karthiNo ratings yet
- Transient StabilityDocument16 pagesTransient StabilityRavi Kumar BanalaNo ratings yet
- Nuclear Astrophysics: Shawn - Bishop@ph - Tum.deDocument42 pagesNuclear Astrophysics: Shawn - Bishop@ph - Tum.deJ Jesús Villanueva GarcíaNo ratings yet
- Lid Driven Cavity Flow OK Final EldwinDocument33 pagesLid Driven Cavity Flow OK Final Eldwineldwin_dj7216No ratings yet
- Computational Fluid Dynamics: Term ProjectDocument49 pagesComputational Fluid Dynamics: Term ProjectakinojohnkennedyNo ratings yet
- Climbing Flight Angle and RateDocument3 pagesClimbing Flight Angle and RateCharudutt GhormadeNo ratings yet
- Climbing Flig: General Angle and Rate of Climb InformationDocument3 pagesClimbing Flig: General Angle and Rate of Climb InformationCharudutt GhormadeNo ratings yet
- Basic Rotor Aerodynamics: 1D MomentumDocument6 pagesBasic Rotor Aerodynamics: 1D MomentumJagabar SathikNo ratings yet
- Motion Graphs Reveal Constant AccelerationDocument6 pagesMotion Graphs Reveal Constant AccelerationHussein Al-IraqiNo ratings yet
- S805 Wind Tunnel TestingDocument15 pagesS805 Wind Tunnel TestingConnor HooverNo ratings yet
- Mass and Momentum Conservation in Fluid FlowDocument16 pagesMass and Momentum Conservation in Fluid FlowrtyiookNo ratings yet
- GD Report Abbasi RajaDocument15 pagesGD Report Abbasi RajaSaif ButtNo ratings yet
- Coefficients Supersonic FlowsDocument4 pagesCoefficients Supersonic Flowsa320neoNo ratings yet
- Influence LinesDocument10 pagesInfluence LinesRahulNo ratings yet
- Fluid Mechanics: Chapter Three: Fluid StaticsDocument66 pagesFluid Mechanics: Chapter Three: Fluid StaticsHamidNo ratings yet
- Chapter 20: Analysis of Nonlinear ResponseDocument26 pagesChapter 20: Analysis of Nonlinear ResponseBhind NijjarNo ratings yet
- WWW - Eng.cu - Edu.eg Users Mkhalil PDFs Exp1Document6 pagesWWW - Eng.cu - Edu.eg Users Mkhalil PDFs Exp1Nivesh AgarwalNo ratings yet
- Takeoff and Landing::R), Where: IsDocument15 pagesTakeoff and Landing::R), Where: IsalysonmicheaalaNo ratings yet
- Correction For Changes in WeightDocument3 pagesCorrection For Changes in WeightMoynul Hasan RonyNo ratings yet
- Free Vibration of ParticlesDocument19 pagesFree Vibration of ParticlesDavid AmachreeNo ratings yet
- Ying 2011 A PDFDocument6 pagesYing 2011 A PDFAngel CerriteñoNo ratings yet
- Curso CoheteDocument18 pagesCurso Cohetetony pinkNo ratings yet
- 핵심물리학 3장Document21 pages핵심물리학 3장승윤No ratings yet
- AeroEngineTech 5 FransLoekito 4776887Document5 pagesAeroEngineTech 5 FransLoekito 4776887Frans LoekitoNo ratings yet
- Motion in Two and Three Dimensions: ExercisesDocument21 pagesMotion in Two and Three Dimensions: ExercisessnglwshtNo ratings yet
- Concurrent Forces Parallelogram MethodDocument8 pagesConcurrent Forces Parallelogram MethodhachanNo ratings yet
- WindturbineDocument14 pagesWindturbineImran ShahzadNo ratings yet
- AD II NotesDocument82 pagesAD II NotesthandialNo ratings yet
- Calculation of Spray Droplet Trajectory in A Moving AirstreamDocument4 pagesCalculation of Spray Droplet Trajectory in A Moving AirstreamsohcahtoaNo ratings yet
- AGC2Document16 pagesAGC2Fengxing ZhuNo ratings yet
- Laser Research Report - ODEDocument10 pagesLaser Research Report - ODEharmonicwaveNo ratings yet
- Unit 2Document60 pagesUnit 2Milion dugumaNo ratings yet
- 6 Principles of Compressors and Fans: Positive Displacement Fluid DynamicDocument6 pages6 Principles of Compressors and Fans: Positive Displacement Fluid DynamicrafallaferNo ratings yet
- Module 1: A Crash Course in Vectors Lecture 4: Gradient of A Scalar FunctionDocument11 pagesModule 1: A Crash Course in Vectors Lecture 4: Gradient of A Scalar FunctionH Aries OñaNo ratings yet
- Finite Wing TheoryDocument70 pagesFinite Wing Theoryreza rohaniNo ratings yet
- Corrected Momnetum and Energy Equations Disprove Betz's LimitDocument25 pagesCorrected Momnetum and Energy Equations Disprove Betz's LimitLarry MansbergerNo ratings yet
- Asst. Prof. Dr. Hayder Mohammad Jaffal: Homogeneous Two-Phase FlowDocument28 pagesAsst. Prof. Dr. Hayder Mohammad Jaffal: Homogeneous Two-Phase FlowprasanthiNo ratings yet
- Steam TurbineDocument30 pagesSteam Turbinenaveedsidhu100% (1)
- Measurement of Structural Damping and Equivalent Mass of A Vibrating BeamDocument5 pagesMeasurement of Structural Damping and Equivalent Mass of A Vibrating BeamTRUNG QUOC LENo ratings yet
- Use Influence Lines to Calculate Beam ResponsesDocument2 pagesUse Influence Lines to Calculate Beam ResponsesAbhishek BhagatNo ratings yet
- Lec 36 PDFDocument2 pagesLec 36 PDFMAYANK PRASADNo ratings yet
- Hydrostatics Pressure Variation and TransmissionDocument32 pagesHydrostatics Pressure Variation and TransmissiondaphcosiNo ratings yet
- Magnetometer Offset NullingDocument4 pagesMagnetometer Offset Nullingr9hinoNo ratings yet
- Appendix A Concept of Sinusoidal Distributed WindingsDocument17 pagesAppendix A Concept of Sinusoidal Distributed WindingsSoumya Ranjan SethyNo ratings yet
- Mae3241 HW3Document3 pagesMae3241 HW3Adrian MackNo ratings yet
- Module 3 Handout 1Document21 pagesModule 3 Handout 1Patricia Yvonne Lara PalmaNo ratings yet
- Standard-Slope Integration: A New Approach to Numerical IntegrationFrom EverandStandard-Slope Integration: A New Approach to Numerical IntegrationNo ratings yet
- Problem Base Learning: Name-Kathan K. Bhavsar ENROLLMENT NUMBER-200203011003 Branch-Aeronautics SEM-6Document7 pagesProblem Base Learning: Name-Kathan K. Bhavsar ENROLLMENT NUMBER-200203011003 Branch-Aeronautics SEM-6Pilot UtsavNo ratings yet
- Flightfury Challenge 2023: Design ReportDocument21 pagesFlightfury Challenge 2023: Design ReportPilot UtsavNo ratings yet
- Silver Oak University Aeronautical Engineering Academic Calendar 2023Document1 pageSilver Oak University Aeronautical Engineering Academic Calendar 2023Pilot UtsavNo ratings yet
- Flight Instructor Training and Employment ProgramDocument2 pagesFlight Instructor Training and Employment ProgramPilot UtsavNo ratings yet
- UntitledDocument1 pageUntitledPilot UtsavNo ratings yet
- Aditya Silver Oak Institute of TechnologyDocument1 pageAditya Silver Oak Institute of TechnologyPilot UtsavNo ratings yet
- TAIL DESIGN OPTIMIZATIONDocument10 pagesTAIL DESIGN OPTIMIZATIONPilot UtsavNo ratings yet
- CFD Lab Manual-1Document38 pagesCFD Lab Manual-1Pilot UtsavNo ratings yet
- Sample Calculations of Assignment 2Document13 pagesSample Calculations of Assignment 2Pilot UtsavNo ratings yet
- Quantum Confinement: An Ultimate Physics of Nanostructures: June 2011Document68 pagesQuantum Confinement: An Ultimate Physics of Nanostructures: June 2011Pilot UtsavNo ratings yet
- Sample Calculations of Assignment 1Document7 pagesSample Calculations of Assignment 1Pilot UtsavNo ratings yet
- AA - End Sem Question BankDocument8 pagesAA - End Sem Question BankPilot UtsavNo ratings yet
- AA - Mid Sem Question BankDocument8 pagesAA - Mid Sem Question BankPilot UtsavNo ratings yet
- Total Derivative NotesDocument13 pagesTotal Derivative NotesPilot UtsavNo ratings yet
- Subject Physics: 3. AcouticsDocument16 pagesSubject Physics: 3. AcouticsPilot UtsavNo ratings yet
- Sheet 1: Practice Sheet: Prof. Jogi Goghari Prof. Mit Shah Subject Coordinator Head of Mechanical DepartmentDocument14 pagesSheet 1: Practice Sheet: Prof. Jogi Goghari Prof. Mit Shah Subject Coordinator Head of Mechanical DepartmentPilot UtsavNo ratings yet
- Subject - Physics: Lecture Companion Numericals: 1. 2. 3. 4. 5. 6. (Ans: 80.41 DB) 7Document2 pagesSubject - Physics: Lecture Companion Numericals: 1. 2. 3. 4. 5. 6. (Ans: 80.41 DB) 7Pilot UtsavNo ratings yet
- Hypersonic JournalDocument29 pagesHypersonic Journaldinesh BabuNo ratings yet
- Learjet45 VersofinalDocument111 pagesLearjet45 VersofinalBlueOneGaussNo ratings yet
- Aircraft Design Exam QuestionsDocument2 pagesAircraft Design Exam QuestionsVijay Gorfad100% (2)
- CFD 01Document7 pagesCFD 01estebang79No ratings yet
- 9613 Unedited en V5Document398 pages9613 Unedited en V5Israel Quiros GonzálezNo ratings yet
- Aerobask Skyview ManualDocument29 pagesAerobask Skyview ManualJLNo ratings yet
- A320fam - MRBR - TR 20.2Document20 pagesA320fam - MRBR - TR 20.2aeroNo ratings yet
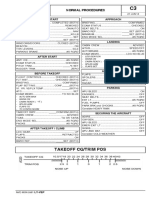
- Quick Reference Handbook Normal ProceduresDocument2 pagesQuick Reference Handbook Normal ProceduresCarlos ReyesNo ratings yet
- PPL ABBA 2 + Good To Know InfoDocument5 pagesPPL ABBA 2 + Good To Know InfoEthan PoonNo ratings yet
- A330 DescentDocument16 pagesA330 DescentkokelvinNo ratings yet
- AIAA2010 Example1Document68 pagesAIAA2010 Example1Agostino De GiuseppeNo ratings yet
- Rplb/Sfs Subic Bay, Philippines: Arita 1 Arrival (ARA 1)Document34 pagesRplb/Sfs Subic Bay, Philippines: Arita 1 Arrival (ARA 1)Mike BaldwinNo ratings yet
- Aerofax - McDonnel Douglas MD-11. A Long Beach Swansong PDFDocument114 pagesAerofax - McDonnel Douglas MD-11. A Long Beach Swansong PDFBDSMasterPT100% (2)
- Ch2 Aircraft LoadsDocument24 pagesCh2 Aircraft LoadsDragon ZNNo ratings yet
- f260d - sf260d-2 Manual de MantenimientoDocument1,924 pagesf260d - sf260d-2 Manual de MantenimientoAlexis RoblesNo ratings yet
- Amm HawkerDocument1,962 pagesAmm HawkerDENNYS VIRGINIA ALVARADO YANCHALUIZANo ratings yet
- Double Trouble SoDocument4 pagesDouble Trouble SoBenji PriceNo ratings yet
- Travel Reservation February 14 For MR FRIDOON RAHIMIDocument2 pagesTravel Reservation February 14 For MR FRIDOON RAHIMIMalikNo ratings yet
- ENR 1.12 - Interception of Civil AircraftDocument4 pagesENR 1.12 - Interception of Civil AircraftitsrijoNo ratings yet
- Aircraft Dynamics and SimulationDocument13 pagesAircraft Dynamics and SimulationTapan DasNo ratings yet
- NCAA Paper 1Document9 pagesNCAA Paper 1Chisom Caleb NwekeNo ratings yet
- Civil-Military Integration and Chinese Military ModernizationDocument4 pagesCivil-Military Integration and Chinese Military ModernizationmbahmumiNo ratings yet
- A4 Portrait FS2004 Keyboard CommandsDocument3 pagesA4 Portrait FS2004 Keyboard CommandsParlindungan SitorusNo ratings yet
- 2 FischerDocument7 pages2 FischerDavid McDermottNo ratings yet
- Boeing 787 TCDSDocument17 pagesBoeing 787 TCDSJayant GhawalkarNo ratings yet
- Applsci 11 02087 With CoverDocument26 pagesApplsci 11 02087 With Covermed turkiNo ratings yet
- Test Pilots Schedual For Minor Power Plant Changes Aw - 027a BMAADocument5 pagesTest Pilots Schedual For Minor Power Plant Changes Aw - 027a BMAAErik HadleyNo ratings yet
- Torsion of Thin Walled Beams: by Dr. Mahdi DamghaniDocument35 pagesTorsion of Thin Walled Beams: by Dr. Mahdi DamghaniAhmed Yasser BouslalahNo ratings yet
- UH-1H & UH-1H: Northwest HelicoptersDocument12 pagesUH-1H & UH-1H: Northwest HelicoptersHuda LestraNo ratings yet