You might also like
- Control System Design Guide: Using Your Computer to Understand and Diagnose Feedback ControllersFrom EverandControl System Design Guide: Using Your Computer to Understand and Diagnose Feedback ControllersRating: 3.5 out of 5 stars3.5/5 (3)
- 3.1.6 Open and Closed Loop SystemsDocument5 pages3.1.6 Open and Closed Loop SystemsChris Ronald CherestalNo ratings yet
- Lab Activitiy 3 - For ESDocument8 pagesLab Activitiy 3 - For ESHiếu ShidoNo ratings yet
- Che642 Lab ManualDocument10 pagesChe642 Lab Manualriniz92No ratings yet
- DCS Interview QuestionDocument8 pagesDCS Interview QuestionZulhelmiNo ratings yet
- R1600G Load Haul Dump Operator Familiarization Student MaterialsDocument14 pagesR1600G Load Haul Dump Operator Familiarization Student Materialspaul heberth areche conovilcaNo ratings yet
- Quick start guide for Live Valve suspension calibrationDocument68 pagesQuick start guide for Live Valve suspension calibrationGabriel Silviu BadarauNo ratings yet
- Total Control Controllers: Owner'S ManualDocument22 pagesTotal Control Controllers: Owner'S ManualPluot1No ratings yet
- ECE 206 Lab ManualDocument17 pagesECE 206 Lab ManualArian BidgoliNo ratings yet
- 2 Dof Helicopter Courseware Sample For Matlab UsersDocument10 pages2 Dof Helicopter Courseware Sample For Matlab UsersAmine EL FERHANINo ratings yet
- 11 Conclusions: ConclusionDocument1 page11 Conclusions: Conclusiondai83No ratings yet
- VW:Audi Transmission AdaptationDocument6 pagesVW:Audi Transmission AdaptationSoCalJRNo ratings yet
- Ziegler-Nichols Closed-Loop Tuning Method - Control Notes PDFDocument5 pagesZiegler-Nichols Closed-Loop Tuning Method - Control Notes PDFDraganNo ratings yet
- Start & Stop Conveyor with IR SensorDocument14 pagesStart & Stop Conveyor with IR SensorThierry LAMBOTTENo ratings yet
- 336E M03 ElecCtrlSysMntr en STUDocument5 pages336E M03 ElecCtrlSysMntr en STUKJDNKJZEFNo ratings yet
- 605 00 262 Live Valve m2 Quick Start Guide RevbDocument68 pages605 00 262 Live Valve m2 Quick Start Guide RevbGabriel Silviu BadarauNo ratings yet
- DCS Interview QuestionsDocument5 pagesDCS Interview QuestionsHardik MantriNo ratings yet
- ET401 Lab Self-Regulating Single Tank Level Control: Modeling and Tuning Profs Sarnacki, Owen, Olivari, Tefft Fall 2019Document4 pagesET401 Lab Self-Regulating Single Tank Level Control: Modeling and Tuning Profs Sarnacki, Owen, Olivari, Tefft Fall 2019essameldinNo ratings yet
- 3.1.4 While Loops and If-Else StructuresDocument11 pages3.1.4 While Loops and If-Else StructuresChris Ronald CherestalNo ratings yet
- FAS8300 and FAS8700 - Replacing The Controller ModuleDocument21 pagesFAS8300 and FAS8700 - Replacing The Controller ModuleKhurram SaoodNo ratings yet
- VROPS Application MonitoringDocument114 pagesVROPS Application MonitoringRavinder SinghNo ratings yet
- Legacy - IOM-LDS-Leak Defense 2237 2022-09-14 (Web)Document41 pagesLegacy - IOM-LDS-Leak Defense 2237 2022-09-14 (Web)ryanNo ratings yet
- Loop TuningDocument5 pagesLoop Tuningurs5No ratings yet
- Manual de Usuario - Centrifuga NF 048Document12 pagesManual de Usuario - Centrifuga NF 048Brevas CuchoNo ratings yet
- Activity 3.1.5 Variables & Functions VEX V5 2021Document12 pagesActivity 3.1.5 Variables & Functions VEX V5 2021Kidus FissehaNo ratings yet
- Additional Opportunity Assessment QuestionsDocument6 pagesAdditional Opportunity Assessment Questionshelloworld1368No ratings yet
- WRC STOAT: Tutorials GuideDocument80 pagesWRC STOAT: Tutorials GuideAoife Fitzgerald100% (1)
- CEA-fall2020-IME-wasim NewDocument5 pagesCEA-fall2020-IME-wasim Newسید کاظمیNo ratings yet
- Replacing A ChassisDocument16 pagesReplacing A ChassisPurushothama GnNo ratings yet
- Freightliner Cascadia Mod - 6 - 083010Document24 pagesFreightliner Cascadia Mod - 6 - 083010Harlinton descalzi100% (11)
- LAB #9: Stepper Motors: No Late Lab Reports Will Be AcceptedDocument3 pagesLAB #9: Stepper Motors: No Late Lab Reports Will Be AcceptedAnjan SenguptaNo ratings yet
- Lab Report Rotary CompleteDocument22 pagesLab Report Rotary CompleteSyed Farid100% (1)
- Autodesk Inventor - Cam and ValveDocument12 pagesAutodesk Inventor - Cam and ValveNdianabasi UdonkangNo ratings yet
- Upgrade RAM on HP NotebookDocument8 pagesUpgrade RAM on HP NotebookLuddi AwaluddinNo ratings yet
- Automatic Bottle FillingDocument41 pagesAutomatic Bottle FillingSanjana Singh100% (1)
- Owner'S Manual and Installation Guide: Watercop Z-WaveDocument12 pagesOwner'S Manual and Installation Guide: Watercop Z-WaveIBJSC.comNo ratings yet
- FLUENT MDM Tut 03 3d Checkvalve DiffusionDocument28 pagesFLUENT MDM Tut 03 3d Checkvalve DiffusionRajeuv GovindanNo ratings yet
- Stacking Magazine Exercise 06Document4 pagesStacking Magazine Exercise 06Tanpa NamaNo ratings yet
- 10050-Sharing EDT Clock With Scan ClockDocument10 pages10050-Sharing EDT Clock With Scan ClockRathnambiga UnnikrishnanNo ratings yet
- Downflow Brining Service Manual SetupDocument28 pagesDownflow Brining Service Manual Setupap0026No ratings yet
- JEIO TECH Manual Baño Con Agitacion - BS - Unlocked PDFDocument23 pagesJEIO TECH Manual Baño Con Agitacion - BS - Unlocked PDFCarlos OrizabalNo ratings yet
- Introduction of Cadence Tools (Extraction)Document8 pagesIntroduction of Cadence Tools (Extraction)giaoduyvinhNo ratings yet
- Virtual Function Generator LabVIEWDocument8 pagesVirtual Function Generator LabVIEWArbind sahNo ratings yet
- Training Practice Questions for Ipsotek VIConfigureDocument8 pagesTraining Practice Questions for Ipsotek VIConfigureEnachescu Razvan Andrei0% (1)
- Manual de Referencia PlanmecaDocument288 pagesManual de Referencia PlanmecaJorge Escalona Hernandez100% (2)
- Automatic switch controlDocument14 pagesAutomatic switch controlbernabasNo ratings yet
- Steering InitializationDocument87 pagesSteering Initializationomanstar120% (2)
- Centrifuga Nuve NF200Document12 pagesCentrifuga Nuve NF200giovanniNo ratings yet
- NF 200 Bench - Top Centrifuge User'S Manual: Nüve Sanay Malzemeler Malat Ve T Caret A.Document12 pagesNF 200 Bench - Top Centrifuge User'S Manual: Nüve Sanay Malzemeler Malat Ve T Caret A.bertrandNo ratings yet
- 2014 Smart Drykeep Installation Instructions Rev 2Document10 pages2014 Smart Drykeep Installation Instructions Rev 2Eunsung QANo ratings yet
- Reliability Upgrade Field InstructionsDocument12 pagesReliability Upgrade Field InstructionsRiaz ul Quran 5No ratings yet
- Release Notes 175Document4 pagesRelease Notes 175inforlexNo ratings yet
- Boston University Laboratory For Biomedical Materials Research TriboIndenter ManualDocument11 pagesBoston University Laboratory For Biomedical Materials Research TriboIndenter ManualAmir OstadiNo ratings yet
- Cam and ValveDocument13 pagesCam and ValveTi PiccoliNo ratings yet
- Configure and Test A Stepper MotorDocument3 pagesConfigure and Test A Stepper MotorSubhasis BiswasNo ratings yet
- LJ Create: Analog and Digital Motor ControlDocument7 pagesLJ Create: Analog and Digital Motor ControlMahmud Hasan SumonNo ratings yet
- XL 795 DDocument36 pagesXL 795 DFrancisco Rodriguez MartinezNo ratings yet
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- AMU - List of M.Tech. / B.Tech. Computer / Electronics & MCA 2022 BatchDocument6 pagesAMU - List of M.Tech. / B.Tech. Computer / Electronics & MCA 2022 BatchManish SharmaNo ratings yet
- Manuel Technique Bistourie Electrique AESCULAPDocument344 pagesManuel Technique Bistourie Electrique AESCULAPOuedraogo yannickNo ratings yet
- SOD-80 (Melf) DiodesDocument3 pagesSOD-80 (Melf) DiodesWalter MarquezNo ratings yet
- Jabra Freeway: User ManualDocument17 pagesJabra Freeway: User ManualCamelia LucaNo ratings yet
- BT136 DatasheetDocument7 pagesBT136 DatasheetAbraham Garcia VeraNo ratings yet
- Expt 6 BJT Characteristics (CE Configuration)Document6 pagesExpt 6 BJT Characteristics (CE Configuration)samarthNo ratings yet
- RBH Integra32 Install SheetDocument2 pagesRBH Integra32 Install SheetJairo DiazNo ratings yet
- PrimeTime AdvancedOCV WPDocument9 pagesPrimeTime AdvancedOCV WPPraful GaikwadNo ratings yet
- SRMU Training at META Co. RiyadhDocument46 pagesSRMU Training at META Co. RiyadhTanveer Ahmad100% (1)
- Coimbatore Energy Meter Manufacturer ProfileDocument8 pagesCoimbatore Energy Meter Manufacturer ProfileKumar ChandanNo ratings yet
- A Review On Solar Based Induction Cooker Using Different TopologiesDocument5 pagesA Review On Solar Based Induction Cooker Using Different TopologiesIyaNo ratings yet
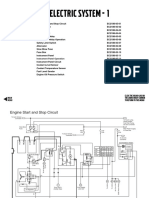
- Electric System - 1: Master Switch Battery RelayDocument18 pagesElectric System - 1: Master Switch Battery RelayLeopoldo Del Campo100% (4)
- Physics All DerivationDocument48 pagesPhysics All Derivationdhruvvegda1000100% (1)
- CDMC Format For Items of ELECTRICALDocument14 pagesCDMC Format For Items of ELECTRICALSaurabh Kumar SinghNo ratings yet
- Teknik ResimDocument1 pageTeknik ResimwebotpadNo ratings yet
- 2SD745 2sd745a 2SD745BDocument3 pages2SD745 2sd745a 2SD745Bjsalinas78No ratings yet
- Electrical Design Engineer ResumeDocument2 pagesElectrical Design Engineer ResumeMukesh KumarNo ratings yet
- Delta 2000Document144 pagesDelta 2000ovais_aijazNo ratings yet
- ISO 50001 - Matrix - en - OSRAMDocument3 pagesISO 50001 - Matrix - en - OSRAMFEEX PUBLISHNo ratings yet
- Electronics Engineer ResumeDocument3 pagesElectronics Engineer ResumeKris BorlazaNo ratings yet
- AMANAT KUMAR-21220521 (Experiments)Document55 pagesAMANAT KUMAR-21220521 (Experiments)Amanat kumarNo ratings yet
- Existing Equipment DetailsDocument77 pagesExisting Equipment DetailsRamawatarNo ratings yet
- Circuit Recloser With Bistable Electromagnetic ActuatorDocument16 pagesCircuit Recloser With Bistable Electromagnetic ActuatorRicardo DoldanNo ratings yet
- Portable 3 cm EME with GaN SSPA and Surplus Feed HornDocument52 pagesPortable 3 cm EME with GaN SSPA and Surplus Feed Hornmuni1No ratings yet
- RF and Microwave Power Dividers and Circulators (EC 31005Document46 pagesRF and Microwave Power Dividers and Circulators (EC 31005POPURINo ratings yet
- JCLP SpliTech2019 FinalDocument19 pagesJCLP SpliTech2019 FinalRemigild PeterNo ratings yet
- Steinway & Sons: Model O: A Stunning PerformanceDocument2 pagesSteinway & Sons: Model O: A Stunning PerformanceMohammad FamuNo ratings yet
- 8.12.01.12 - Datasheet ASRi 2.0Document4 pages8.12.01.12 - Datasheet ASRi 2.0gytoman100% (2)
- Canopen Implementationguide v1Document112 pagesCanopen Implementationguide v1great dayNo ratings yet
- Single Cycle ProcessorDocument23 pagesSingle Cycle ProcessorLý 1 1619No ratings yet