You might also like
- Methodology HifiDocument6 pagesMethodology HifikrcdewanewNo ratings yet
- Guia de Diseño de FuentesDocument6 pagesGuia de Diseño de Fuentestu_novia_nos_enganiaNo ratings yet
- Diseño de Fuente de AlimentaciónDocument6 pagesDiseño de Fuente de Alimentaciónhector Miranda BernalNo ratings yet
- Lab 3 Squirrel Cage Induction Machine-1Document8 pagesLab 3 Squirrel Cage Induction Machine-1max100% (1)
- Single Phase To Three Phase ConverterDocument5 pagesSingle Phase To Three Phase ConverterGabriel MejiaNo ratings yet
- A Novel High Power Factor PWM Rectifier Inverter For Electric Vehicle Charging StationDocument6 pagesA Novel High Power Factor PWM Rectifier Inverter For Electric Vehicle Charging StationAlap KareepadathNo ratings yet
- Synch Alternator Exp6Document8 pagesSynch Alternator Exp6Prìyañshú GuptãNo ratings yet
- New Generator Static Excitation: Using Boost-Buck ChopperDocument6 pagesNew Generator Static Excitation: Using Boost-Buck ChopperSherif M. DabourNo ratings yet
- A1Document4 pagesA1hsvskumarNo ratings yet
- Regenerative Braking of Induction MotorDocument27 pagesRegenerative Braking of Induction MotorcoolkannaNo ratings yet
- Improved Power Quality For Renewable Power Generation Systems Presence of Non-Linear LoadsDocument6 pagesImproved Power Quality For Renewable Power Generation Systems Presence of Non-Linear LoadsPhanikumar Bellam KondaNo ratings yet
- Cover Type B Exam: Electrical MachinesDocument14 pagesCover Type B Exam: Electrical MachinesVikri RahmatNo ratings yet
- Active Front End Unity Power Factor-02Document4 pagesActive Front End Unity Power Factor-02abdullah mohamedNo ratings yet
- EES Power System Dynamics and Control Test 1 QuestionsDocument4 pagesEES Power System Dynamics and Control Test 1 QuestionsRavi TejaNo ratings yet
- Electric Bike Controller with Regen BrakingDocument23 pagesElectric Bike Controller with Regen Brakingabhignyan nayak ?No ratings yet
- 637 - 2024 Lab-5 Synchronous MachinesDocument13 pages637 - 2024 Lab-5 Synchronous Machineseren.alliNo ratings yet
- Motor DriveDocument21 pagesMotor DriveMuhammad UmairNo ratings yet
- Multi-Modular Multi-Level Pulse Width Modulated Inverters: Mon W LDocument6 pagesMulti-Modular Multi-Level Pulse Width Modulated Inverters: Mon W LveguruprasadNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Pic16f72 3 Phase Motor ControlDocument18 pagesPic16f72 3 Phase Motor ControlMatias BerriosNo ratings yet
- Speed Control of DC MotorDocument48 pagesSpeed Control of DC MotorVivek VickyNo ratings yet
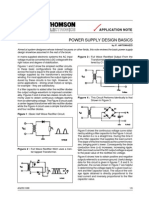
- Power Supply Design Basics: Figure 3: Full Wave Rectified Output From TheDocument6 pagesPower Supply Design Basics: Figure 3: Full Wave Rectified Output From Theprotesto06No ratings yet
- TRANSIENT STABILITY ANALYSIS OF POWER SYSTEMSDocument26 pagesTRANSIENT STABILITY ANALYSIS OF POWER SYSTEMSSarojakanti SahooNo ratings yet
- Shivaji University Question Bank For Power System-II SubjectDocument7 pagesShivaji University Question Bank For Power System-II SubjectAditya PatilNo ratings yet
- Experiment 8 Synchronous Generator Line SynchronizationDocument10 pagesExperiment 8 Synchronous Generator Line SynchronizationMd Rodi Bidin100% (1)
- MEHRAN UNIVERSITY BE EXAM 2009 POWER SYSTEM ANALYSISDocument2 pagesMEHRAN UNIVERSITY BE EXAM 2009 POWER SYSTEM ANALYSISkeerthanavijayaNo ratings yet
- Build a variety of voltage converters from popular ICsDocument6 pagesBuild a variety of voltage converters from popular ICsSudheesh Puthanpurayil100% (1)
- Power ConverterDocument9 pagesPower ConverterSrini VasuluNo ratings yet
- Power System Analysis and Simulation Question PaperDocument2 pagesPower System Analysis and Simulation Question PaperKeyur PatelNo ratings yet
- 1707 An253 Power Supply Design Basics ImpDocument6 pages1707 An253 Power Supply Design Basics ImpbmmostefaNo ratings yet
- Induction Motor Drive Using Seven Level Multilevel Inverter For Energy Saving in Variable Torque Load ApplicationDocument8 pagesInduction Motor Drive Using Seven Level Multilevel Inverter For Energy Saving in Variable Torque Load ApplicationAnonymous 22GBLsme1No ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Fig. 2 (A) Self Excited Induction GeneratorDocument7 pagesFig. 2 (A) Self Excited Induction GeneratorLaxmikant BagaleNo ratings yet
- Power System Analysis-BE (PT) NEWDocument13 pagesPower System Analysis-BE (PT) NEWMATHANKUMAR.SNo ratings yet
- BDocument46 pagesBemmanueel2No ratings yet
- Feed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemDocument6 pagesFeed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemSiddharth Jayashekar KNo ratings yet
- Matrix Converter - ReportDocument31 pagesMatrix Converter - ReportAmal P Nirmal100% (2)
- Applying PWM to Control Overcurrents at Unbalanced Faults of Forced-Commutated VSCsDocument6 pagesApplying PWM to Control Overcurrents at Unbalanced Faults of Forced-Commutated VSCsJULFANRI SIRAITNo ratings yet
- SimulsheshhDocument13 pagesSimulsheshhPaul Brian ferrarisNo ratings yet
- Work Sheet On Per UnitDocument3 pagesWork Sheet On Per UnitteddydemerewNo ratings yet
- Researchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsDocument6 pagesResearchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsAnonymous zmV3UaG0TNo ratings yet
- Power System Analysis-IiDocument115 pagesPower System Analysis-IiSrinivasReddy100% (2)
- Protection of 3-phase motors from unbalance and loss of phaseDocument12 pagesProtection of 3-phase motors from unbalance and loss of phasedexterNo ratings yet
- Control Loops 2Document22 pagesControl Loops 2Muntadher AbbasNo ratings yet
- Basic Electronics Model Question Paper 1Document35 pagesBasic Electronics Model Question Paper 1Mr girishNo ratings yet
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNo ratings yet
- 25-Feb-2020 11B Converter Fed and Chopper Fed DC DrivesDocument16 pages25-Feb-2020 11B Converter Fed and Chopper Fed DC DrivesATULYA ALOK 17BEE0065No ratings yet
- Electrical Machines Lab ManualDocument37 pagesElectrical Machines Lab ManualAtharv ParanjpeNo ratings yet
- 2018 April Power Systems Analysis - EE306-A - Ktu QbankDocument3 pages2018 April Power Systems Analysis - EE306-A - Ktu QbankJeril joseNo ratings yet
- Matlab Simulation and Comparison of Single Phase To Three Phase Converter Fed Induction Motor Drive Using One and Two RectifierDocument11 pagesMatlab Simulation and Comparison of Single Phase To Three Phase Converter Fed Induction Motor Drive Using One and Two RectifierIJMERNo ratings yet
- Application Guideline #30: Toshiba International CorporationDocument3 pagesApplication Guideline #30: Toshiba International CorporationsebouelletNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Enjeti1993Document7 pagesEnjeti1993md naufallNo ratings yet
- Xiaofengyang2008Document5 pagesXiaofengyang2008md naufallNo ratings yet
- What Is A Variable Speed Drive - ABBDocument11 pagesWhat Is A Variable Speed Drive - ABBmd naufallNo ratings yet
- Dias2009Document8 pagesDias2009md naufallNo ratings yet
- Tut 8Document1 pageTut 8Chandra Shekhar BishnoiNo ratings yet
- Which Is Better Low Frequency or High-Frequency InverterDocument11 pagesWhich Is Better Low Frequency or High-Frequency InverterjackNo ratings yet
- Kcppump 8436 PyyiehDocument1 pageKcppump 8436 Pyyiehعالم الصيانة معدات ثقيلة ومعدات خرسانةNo ratings yet
- Indoor Climate Control FundamentalDocument10 pagesIndoor Climate Control FundamentalPracticalHVACNo ratings yet
- DCU Heater Mod.Document36 pagesDCU Heater Mod.Varun Gupta100% (1)
- AP040061E Bearing Currents PBWDocument5 pagesAP040061E Bearing Currents PBWÁrthur LimaNo ratings yet
- Lennox - Mini Split - 17SEER - 9K - HP - SubmittalDocument3 pagesLennox - Mini Split - 17SEER - 9K - HP - SubmittalJose Baez C.No ratings yet
- Learn About Vibration: Volume 2: Advanced Vibration AnalysisDocument24 pagesLearn About Vibration: Volume 2: Advanced Vibration AnalysisamekhzoumiNo ratings yet
- Effect of Quenching Temperature On The Mechanical Properties of Cast Ti 6al 4V AlloyDocument7 pagesEffect of Quenching Temperature On The Mechanical Properties of Cast Ti 6al 4V AlloySEP-PublisherNo ratings yet
- Leonard Eeman's Biocircuits and InsightsDocument4 pagesLeonard Eeman's Biocircuits and Insightsmb1mb1100% (1)
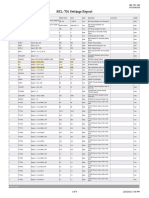
- SEL-701 Settings ReportDocument9 pagesSEL-701 Settings ReportJosé AntonioNo ratings yet
- Upwork (ODesk) Test Answers - Mechanical Engineering Test 2015 - MiscellaneoDocument18 pagesUpwork (ODesk) Test Answers - Mechanical Engineering Test 2015 - MiscellaneoAnonymous LpCD3hNo ratings yet
- FinalpptDocument23 pagesFinalpptPoojaNo ratings yet
- API 6.2A Metering Assemblies-Truck and Rail Loading and Unloading Measurement Systems First Edition, July 2021Document45 pagesAPI 6.2A Metering Assemblies-Truck and Rail Loading and Unloading Measurement Systems First Edition, July 2021FRescuderoNo ratings yet
- Ball Mill Operating Manual 266795 Manual InstrDocument48 pagesBall Mill Operating Manual 266795 Manual InstrHarish Chandra SinghNo ratings yet
- Seeker/Sensor Technology Assessment For ECAP: Presented by Tim CarrollDocument18 pagesSeeker/Sensor Technology Assessment For ECAP: Presented by Tim CarrollWaqas Ahmed100% (2)
- ElectromagneticsDocument84 pagesElectromagneticsLex FrancisNo ratings yet
- ManualDocument13 pagesManualkenoly123No ratings yet
- Welcoming The Maiden Archetype: When Can I Do The Meditation?Document3 pagesWelcoming The Maiden Archetype: When Can I Do The Meditation?Gabrijela TominacNo ratings yet
- Natural and Forced Convection Experiments-2Document12 pagesNatural and Forced Convection Experiments-2Dare AdeoyeNo ratings yet
- Kalmar Cargotec RTG E One Generator and AVRDocument17 pagesKalmar Cargotec RTG E One Generator and AVRmliugong100% (2)
- Green FrameworkDocument22 pagesGreen Frameworkjalees23No ratings yet
- SLP FORMAT (Autoguardado)Document67 pagesSLP FORMAT (Autoguardado)Mónica pérezNo ratings yet
- 3 Phase Auto Change Over SwitchDocument23 pages3 Phase Auto Change Over Switchajaykeshav100% (3)
- Developing Empirical Nusselt Number Correlations For Single Phase Flow Through A Plate Heat ExchangerDocument31 pagesDeveloping Empirical Nusselt Number Correlations For Single Phase Flow Through A Plate Heat ExchangerAli Hashmi100% (1)
- On Writing Well (William Zinsser)Document150 pagesOn Writing Well (William Zinsser)Onder Y.100% (4)
- Lecture Notes on Temperature, Thermal Equilibrium, and the Microscopic Model of an Ideal GasDocument5 pagesLecture Notes on Temperature, Thermal Equilibrium, and the Microscopic Model of an Ideal GasDonald Ng Jer YiNo ratings yet
- Electromagnetic Induction - DPP 02 - Lakshya JEE 2024Document3 pagesElectromagnetic Induction - DPP 02 - Lakshya JEE 2024abhishekff25No ratings yet
- Multi Pulse Meter HANYOUNG NUX RP3Document4 pagesMulti Pulse Meter HANYOUNG NUX RP3RudiNo ratings yet
- VW 50400/50700 Motor Oil ComparisonDocument5 pagesVW 50400/50700 Motor Oil ComparisonhansiiiNo ratings yet