You might also like
- Data Encoding Line Coding and Transmission Modes atDocument13 pagesData Encoding Line Coding and Transmission Modes atAjay ReddyNo ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Line Codes RZ AND NRZDocument48 pagesLine Codes RZ AND NRZjigef19343No ratings yet
- DigitalCommthr Compiled SumaDocument68 pagesDigitalCommthr Compiled SumaPunith Gowda M BNo ratings yet
- Line CodesDocument16 pagesLine CodesPriya KrishnanNo ratings yet
- LINE CODESDocument43 pagesLINE CODESPriya KrishnanNo ratings yet
- Chapter3 Lect5Document16 pagesChapter3 Lect5mhamdi mounirNo ratings yet
- Line CodingDocument19 pagesLine CodingKochar InderkumarNo ratings yet
- Line Coding V2Document28 pagesLine Coding V2Kì Hyö JüngNo ratings yet
- Lecture11 Line CodingDocument37 pagesLecture11 Line CodingDebasis Chandra100% (1)
- Lecture Topics Eye Diagrams Pulse Amplitude Modulation (PAM) Binary Digital ModulationDocument19 pagesLecture Topics Eye Diagrams Pulse Amplitude Modulation (PAM) Binary Digital ModulationbalkyderNo ratings yet
- Lecture-7 - Line CodingDocument14 pagesLecture-7 - Line CodingFahim Hasan AlifNo ratings yet
- Optimal Non-Coherent Demodulation TechniquesDocument5 pagesOptimal Non-Coherent Demodulation TechniquesNaser ElmisbahNo ratings yet
- L16: Noise Performance of SSB & AM: (P&S Pp. 220-225 C&C 10.2)Document9 pagesL16: Noise Performance of SSB & AM: (P&S Pp. 220-225 C&C 10.2)Hunter VerneNo ratings yet
- 04-Line Codes and SpectraDocument19 pages04-Line Codes and SpectraJayden AdevaNo ratings yet
- BITS PILANI Chemistry Lectures Principal Quatum NumberDocument31 pagesBITS PILANI Chemistry Lectures Principal Quatum NumberNaresh SehdevNo ratings yet
- Noise Performnace AM N SSB EEE367Document14 pagesNoise Performnace AM N SSB EEE367SAWRAV DAS 1802039No ratings yet
- Polyphase Channelizer TransformationDocument17 pagesPolyphase Channelizer Transformationtasos1970No ratings yet
- Communication Systems Engineering Lecture on Hypothesis Testing and BER AnalysisDocument16 pagesCommunication Systems Engineering Lecture on Hypothesis Testing and BER AnalysisKrishna OodhorahNo ratings yet
- Line CodingDocument23 pagesLine CodingNightbotNo ratings yet
- Experiment 8: Generate and Analyze Line CodesDocument4 pagesExperiment 8: Generate and Analyze Line CodesSanskar GuptaNo ratings yet
- Beam-pattern synthesis for active sensing MIMO radarsDocument36 pagesBeam-pattern synthesis for active sensing MIMO radarsAnil TamangNo ratings yet
- 6 AaaDocument38 pages6 AaaTuryahebwa AlexNo ratings yet
- Line Coding: Self-SynchronisationDocument12 pagesLine Coding: Self-SynchronisationKenny Samaroo100% (1)
- Digital Communication Line Codes PDFDocument7 pagesDigital Communication Line Codes PDFAzImmNo ratings yet
- Basics of RF Electronics: Alessandro GalloDocument29 pagesBasics of RF Electronics: Alessandro GalloMONICA LOHNo ratings yet
- Expt - 3 Resolving PowerDocument2 pagesExpt - 3 Resolving PowerAnkush KurkureNo ratings yet
- Digital 6Document20 pagesDigital 6Anikk DasNo ratings yet
- Noise IN Analog Communication Systems: UNIT-5Document55 pagesNoise IN Analog Communication Systems: UNIT-5NaliniNo ratings yet
- A Log Periodic Series Fed Antennas Array Design Using A Simple Transmission Line ModelDocument10 pagesA Log Periodic Series Fed Antennas Array Design Using A Simple Transmission Line ModelSubhanjali MyneniNo ratings yet
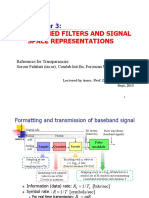
- Formatting and Baseband ModulationDocument63 pagesFormatting and Baseband ModulationHannan KhalidNo ratings yet
- Review: Line Codes and Pulse ShapingDocument28 pagesReview: Line Codes and Pulse ShapingbalkyderNo ratings yet
- Line Coding TechniquesDocument13 pagesLine Coding TechniquesSahilPrabhakarNo ratings yet
- Lecture 4Document64 pagesLecture 4Martian 07No ratings yet
- Kuliah 6b Bandpass ModulationDocument50 pagesKuliah 6b Bandpass ModulationBambang Arie SNo ratings yet
- Optical Fiber Signals Propagation GuideDocument80 pagesOptical Fiber Signals Propagation Guidesrividya.lNo ratings yet
- PTSP Unit 4Document19 pagesPTSP Unit 4Juyaal PremisesNo ratings yet
- Power Spectral DensityDocument8 pagesPower Spectral DensityANIRUDDHA PAULNo ratings yet
- Antenna IntroDocument41 pagesAntenna IntroRadhika SethuNo ratings yet
- NRZ UNIPOLAR SCHEMEDocument16 pagesNRZ UNIPOLAR SCHEMEdicijNo ratings yet
- Modulation Techniques OverviewDocument30 pagesModulation Techniques Overviewmercury7k29750No ratings yet
- Lecture 9 09 11 22Document32 pagesLecture 9 09 11 22Alkit SharmaNo ratings yet
- A Log Periodic Series-Fed Antennas Array Design Using A Simple Transmission Line ModelDocument10 pagesA Log Periodic Series-Fed Antennas Array Design Using A Simple Transmission Line ModelSugunaNo ratings yet
- Tema Nro. 3Document56 pagesTema Nro. 3Milagros LimNo ratings yet
- Incremental Encoder Based Position and Speed Identification: Modeling and SimulationDocument13 pagesIncremental Encoder Based Position and Speed Identification: Modeling and SimulationmohdabdultalibNo ratings yet
- ElectronicsDocument9 pagesElectronicsEstephen EdaNo ratings yet
- C3 Signalspace2013 PDFDocument34 pagesC3 Signalspace2013 PDFthanhvinhegnNo ratings yet
- Kinerja Sistem Komunikasi: Digital Bandpass ModulationDocument47 pagesKinerja Sistem Komunikasi: Digital Bandpass ModulationChaeriah WaelNo ratings yet
- For NRZ Polar, NRZ Unipolar 1. Description of The InputDocument9 pagesFor NRZ Polar, NRZ Unipolar 1. Description of The InputASHIRWAD RAYNo ratings yet
- Line Coding: AcknowledgmentsDocument39 pagesLine Coding: Acknowledgmentssana aminNo ratings yet
- Lecture #6 Baseband Communications - Part - 2Document41 pagesLecture #6 Baseband Communications - Part - 2Mona BakriNo ratings yet
- Symmetry and IR Spectroscopy of Inorganic MoleculesDocument16 pagesSymmetry and IR Spectroscopy of Inorganic Moleculesbarry allenNo ratings yet
- Antenna Array-LastDocument29 pagesAntenna Array-LastMohamed ShabanaNo ratings yet
- Biomedical Instrumentation DAC and ADC ConvertersDocument58 pagesBiomedical Instrumentation DAC and ADC ConvertersKarim SakrNo ratings yet
- Line Coding Techniques and Their ComparisonDocument30 pagesLine Coding Techniques and Their Comparisonjohn billy balidioNo ratings yet
- Baseband Transmission PDFDocument54 pagesBaseband Transmission PDFHồng PhúcNo ratings yet
- CM Homework 3Document5 pagesCM Homework 3mazhariNo ratings yet
- Overview of Signal Detection and The RF ChainDocument10 pagesOverview of Signal Detection and The RF Chainbasa.puttiNo ratings yet
- Engine Room ManualDocument32 pagesEngine Room ManualSarm1s100% (8)
- A 104-Ghz Phase-Locked Loop Using A Vco at Second Pole FrequencyDocument9 pagesA 104-Ghz Phase-Locked Loop Using A Vco at Second Pole FrequencyBasavaraj S KashappanavarNo ratings yet
- Futaba 12FGADocument127 pagesFutaba 12FGAMarcelo Camargo100% (1)
- Catv Block DiagramDocument7 pagesCatv Block DiagramJenny Babe Lindugan-Lopez0% (1)
- Smart Dust PresentationDocument22 pagesSmart Dust Presentationwazirkhan2010No ratings yet
- Chapter 4 Tutorial StudentDocument4 pagesChapter 4 Tutorial StudentAzrif MoskamNo ratings yet
- Directive Array Based Pattern Reconfigurable Antenna: Kranti Kumar Katare, Animesh Biswas, Karu P. EsselleDocument4 pagesDirective Array Based Pattern Reconfigurable Antenna: Kranti Kumar Katare, Animesh Biswas, Karu P. EssellehosseinNo ratings yet
- Task-4 Shaik Suhil 18BEC2007: AlogorithmDocument8 pagesTask-4 Shaik Suhil 18BEC2007: AlogorithmSuhil IrshadNo ratings yet
- 5900 Series Base Station Product Description 03 (20180912)Document72 pages5900 Series Base Station Product Description 03 (20180912)Haider Al SaadiNo ratings yet
- 1999 Dassault Falcon 2000Document4 pages1999 Dassault Falcon 2000TesteArquivosNo ratings yet
- Sl343-Sl343 2021 Advancemdb Survey Cme TSSR Globe-Expansion2020 (Aborox)Document81 pagesSl343-Sl343 2021 Advancemdb Survey Cme TSSR Globe-Expansion2020 (Aborox)Jamil Baraquiel LucenaNo ratings yet
- 5 Nano 2022 Conference TemplateDocument5 pages5 Nano 2022 Conference TemplateHemanth PragadaNo ratings yet
- PWRSPKR 15W ManualDocument4 pagesPWRSPKR 15W ManualJoonki YunNo ratings yet
- Nodo SG4000Document2 pagesNodo SG4000DarwinNo ratings yet
- CH13 - Telecomms, ECE Laws and EthicsDocument17 pagesCH13 - Telecomms, ECE Laws and EthicsNorman OcoNo ratings yet
- Panasonic Site SurveyDocument4 pagesPanasonic Site SurveyLefterisNo ratings yet
- Rcl6Nka. Mobitel: Pat StatusDocument20 pagesRcl6Nka. Mobitel: Pat Statusdumindu1No ratings yet
- Guc 302 55 12913 2021-12-08T13 09 13Document31 pagesGuc 302 55 12913 2021-12-08T13 09 13Engy MaherNo ratings yet
- 3D Lanza Radar Family: Defense and SecurityDocument6 pages3D Lanza Radar Family: Defense and SecurityRINGUYENEZA Thimothe0% (1)
- Aphex Channel OMDocument14 pagesAphex Channel OMAlexis RudnikNo ratings yet
- Block Diagram: UX-V10GNDocument12 pagesBlock Diagram: UX-V10GNBilly FrancoNo ratings yet
- UMTS Uplink Interference Analysis ReportsDocument4 pagesUMTS Uplink Interference Analysis ReportsJames BaileyNo ratings yet
- Odi 065R15NB18JJ02 GQDocument4 pagesOdi 065R15NB18JJ02 GQJŕ MaiaNo ratings yet
- Plans To Build Powered Radionic Devices Using RF and LM386 AmpsDocument2 pagesPlans To Build Powered Radionic Devices Using RF and LM386 Ampssuso73100% (3)
- 9661 VUHF Ground Radio Family 6137Document2 pages9661 VUHF Ground Radio Family 6137riyanto_fisika55350% (1)
- Produk Kode Harga Produk Kode Harga Format TransaksiDocument8 pagesProduk Kode Harga Produk Kode Harga Format TransaksiJaka RiaNo ratings yet
- Power Your Signal: Antenna SpecificationsDocument3 pagesPower Your Signal: Antenna SpecificationsвикторNo ratings yet
- OscillatorDocument21 pagesOscillatorHarshit GargNo ratings yet
- British Kesrtel Bridge BookDocument286 pagesBritish Kesrtel Bridge BookSergeyNo ratings yet
- Sailor 6110 Mini C Gmdss Product SheetDocument2 pagesSailor 6110 Mini C Gmdss Product Sheetaji jayaNo ratings yet