You might also like
- 3.1 Konstrukcje Cienkoscienne I Ramy NadwozioweDocument18 pages3.1 Konstrukcje Cienkoscienne I Ramy NadwozioweMarta PabelNo ratings yet
- 03 Układ Jezdny I Nośny MinDocument49 pages03 Układ Jezdny I Nośny MinWeronikaMatysekNo ratings yet
- 2 BO ProwadniceDocument13 pages2 BO ProwadniceBartosz MiszczukNo ratings yet
- Sprzegło CierneDocument7 pagesSprzegło Ciernelukaszpietras84No ratings yet
- DobrowolskiDocument4 pagesDobrowolskiKacper SzatkowskiNo ratings yet
- Rozdział IV - Budowa PojazdówDocument62 pagesRozdział IV - Budowa PojazdówKacper JarominNo ratings yet
- HTTPWWW Wso Wroc Plwydzialywpikbnpid2011zn12011018nizinskikupiczpdf1Document12 pagesHTTPWWW Wso Wroc Plwydzialywpikbnpid2011zn12011018nizinskikupiczpdf1jlukaszewski81No ratings yet
- Mes - Suwnica BramowaDocument32 pagesMes - Suwnica Bramowakamilek69No ratings yet
- Diagnozowanie Silnka Odrzutowego Metodą Analizy Drgań: March 2009Document17 pagesDiagnozowanie Silnka Odrzutowego Metodą Analizy Drgań: March 2009pan jajkoNo ratings yet
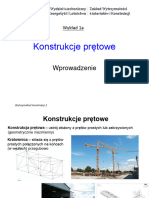
- Wyklad - 01a Konstrukcje Prętowe - v6Document28 pagesWyklad - 01a Konstrukcje Prętowe - v6lolsonNo ratings yet
- Przekladnia PasowaDocument21 pagesPrzekladnia PasowakamelsuxNo ratings yet
- Praca InżynierskaDocument49 pagesPraca InżynierskaAleksandra Wilk50% (2)
- Ćw. 2 Aerodynamika SamochoduDocument5 pagesĆw. 2 Aerodynamika SamochoduSzymon SzozdaNo ratings yet
- Wplyw RodzajuDocument8 pagesWplyw RodzajuJustyna BujakNo ratings yet
- Projektowanie Maszyn OdpowiedziDocument14 pagesProjektowanie Maszyn Odpowiedzihenry003No ratings yet
- 1 - 10 Przekładnie ZębateDocument35 pages1 - 10 Przekładnie ZębaterasesqNo ratings yet
- 1 Projekt Przekładnia PasowaDocument10 pages1 Projekt Przekładnia Pasowagreg1212No ratings yet
- Kopia Odpowiedzi 1-10Document6 pagesKopia Odpowiedzi 1-10Bartek MNo ratings yet
- Chomka PDFDocument6 pagesChomka PDFWawrzyniec DługopolskiNo ratings yet
- Projekt I Analiza WytrzymałościowaDocument10 pagesProjekt I Analiza Wytrzymałościowajacekmalarz69No ratings yet
- Analiza Sztywności Kompensatora GumDocument15 pagesAnaliza Sztywności Kompensatora GumFlexatherm HONo ratings yet
- Sprzegło CierneDocument7 pagesSprzegło Ciernelukaszpietras84No ratings yet
- Numeryczna Analiza WytrzymałościowaDocument5 pagesNumeryczna Analiza WytrzymałościowaAndrzej RogalaNo ratings yet
- Martin PEXA, 2010Document4 pagesMartin PEXA, 2010Diep Hau ThanNo ratings yet
- SSP320 6-Biegowa Rae Czna Skrzynia Bieg WDocument36 pagesSSP320 6-Biegowa Rae Czna Skrzynia Bieg WKrzysztof BydełekNo ratings yet
- AutobusybezpieczneDocument4 pagesAutobusybezpiecznemalgosiasacNo ratings yet
- ZagadnieniaDocument1 pageZagadnieniagabriela.strek83No ratings yet
- Sapinski 3Document8 pagesSapinski 3Luiz Fernando VieiraNo ratings yet
- Projekt I Budowa Chwytaka SzczypcowDocument11 pagesProjekt I Budowa Chwytaka Szczypcowdupa21No ratings yet
- Mooring Equipment Guidelines (MEG4) - Strony-9Document22 pagesMooring Equipment Guidelines (MEG4) - Strony-9gglowekNo ratings yet
- A.biegus Cz.6 Elementy Zginane ZwichrzenieDocument104 pagesA.biegus Cz.6 Elementy Zginane ZwichrzenieKarol IwanekNo ratings yet
- Wroblewski - Obiekty InzynierskieDocument6 pagesWroblewski - Obiekty InzynierskieTomasz WróblewskiNo ratings yet
- WR D 31 1 01 20221130 - TekstDocument71 pagesWR D 31 1 01 20221130 - TekstkaliszmatNo ratings yet
- WojsJ KsztaltowanieCharakterystykDocument125 pagesWojsJ KsztaltowanieCharakterystykGoździewskaNo ratings yet
- Projekt 6 Sprawdzenie I Wymiana Przegubów Kulowych Drążków KierowniczychDocument5 pagesProjekt 6 Sprawdzenie I Wymiana Przegubów Kulowych Drążków Kierowniczychpledzwon123No ratings yet
- Stanowisko Badania Probek Stali DSM - 1Document12 pagesStanowisko Badania Probek Stali DSM - 1100regNo ratings yet
- HTTPWWW Wso Wroc Plwydzialywpikbnpid2011zn12011008jamroziakpdf-1Document12 pagesHTTPWWW Wso Wroc Plwydzialywpikbnpid2011zn12011008jamroziakpdf-1Grzegorz BryksaNo ratings yet
- HTTPPNT Pollub plpdfnr1001Document9 pagesHTTPPNT Pollub plpdfnr1001Olaf MiemczykNo ratings yet
- BDM WTWDocument4 pagesBDM WTWkonstantasNo ratings yet
- Gronowicz - Teoria Maszyn I MechanizmowDocument207 pagesGronowicz - Teoria Maszyn I Mechanizmowenigma10100% (1)
- 81 140 A BiE TADEJ TADEJ CZECH HORNIK GUSTOF JEDRUSIKDocument8 pages81 140 A BiE TADEJ TADEJ CZECH HORNIK GUSTOF JEDRUSIKstaron.oolNo ratings yet
- Obsługa Ukłądu.. KONSPEKTDocument8 pagesObsługa Ukłądu.. KONSPEKTgordi929No ratings yet
- Katalog Pmi 2013 PLDocument91 pagesKatalog Pmi 2013 PLkifteamNo ratings yet
- Teoria Maszyn I Mechanizmów - Gronowicz I InniDocument207 pagesTeoria Maszyn I Mechanizmów - Gronowicz I InnikamelsuxNo ratings yet
- Konstrukcje Metalowe 1 - Przyklad 9 - SlupDocument7 pagesKonstrukcje Metalowe 1 - Przyklad 9 - SlupRyśNo ratings yet
- Układy Napędu Pasowego: Informacje TechniczneDocument28 pagesUkłady Napędu Pasowego: Informacje TechniczneRobert Nie WiemNo ratings yet
- Auto Geo Test GTODocument37 pagesAuto Geo Test GTOmczechlowskiNo ratings yet
- Stalowe Konstrukcje Prętowe. Cz. 1, Hale Przemysłowe Oraz Obiekty Użyteczności Publicznej - Zdzisław Kurzawa. Wyd. 2. Poznań, 2012.Document6 pagesStalowe Konstrukcje Prętowe. Cz. 1, Hale Przemysłowe Oraz Obiekty Użyteczności Publicznej - Zdzisław Kurzawa. Wyd. 2. Poznań, 2012.qbawroNo ratings yet
- 307 Silnik Tu5jp4 Demontaz Montaz Wa Ek Rozrz DuDocument9 pages307 Silnik Tu5jp4 Demontaz Montaz Wa Ek Rozrz DuPawel WiatrzykNo ratings yet
- WR D 22 5 01 2023.07.25 - TekstDocument84 pagesWR D 22 5 01 2023.07.25 - TekstkaliszmatNo ratings yet
- AN120116.008 - Podręcznik Produktu (Z Książką Kontrolną) Wciągnik Łańc...Document86 pagesAN120116.008 - Podręcznik Produktu (Z Książką Kontrolną) Wciągnik Łańc...Łukasz SiczyńskiNo ratings yet
- PD Sprzęgło Główne PojazduDocument1 pagePD Sprzęgło Główne PojazduFajgielNo ratings yet
- Wózek Do Wagonów Towarowych Z ZestaDocument7 pagesWózek Do Wagonów Towarowych Z Zestagheorghe stoicaNo ratings yet
- Scania Podrecznik ZabudowyDocument48 pagesScania Podrecznik ZabudowyRobinsonNo ratings yet
- LuK TecBr 2CT Repair Solution VW LowRes PLDocument44 pagesLuK TecBr 2CT Repair Solution VW LowRes PLPawluchNo ratings yet
- WR M 22 01 2021.03.04 Rozdział 10 I 11Document109 pagesWR M 22 01 2021.03.04 Rozdział 10 I 11Grzegorz WilkNo ratings yet
- Projekt Przekładni Zębatej Elementy Znormalizowane Obliczenia Wytyczne 1Document145 pagesProjekt Przekładni Zębatej Elementy Znormalizowane Obliczenia Wytyczne 1Norbert RykowskiNo ratings yet
- 038 Zwierzewicz BorkowskiDocument12 pages038 Zwierzewicz BorkowskijolygeekNo ratings yet
- Ćwiczenia Z AutoCAD 2.0Document17 pagesĆwiczenia Z AutoCAD 2.0Pawel PodporaNo ratings yet
- M1 S2 MiBM SiC 209 - BPSDocument4 pagesM1 S2 MiBM SiC 209 - BPSPawel PodporaNo ratings yet
- M1 S1 MiBM SiC 410 - BSiC - IDocument5 pagesM1 S1 MiBM SiC 410 - BSiC - IPawel PodporaNo ratings yet
- Plan TreningowyDocument2 pagesPlan TreningowyPawel PodporaNo ratings yet
- M1 S2 MiBM SiC 210 - DPSDocument4 pagesM1 S2 MiBM SiC 210 - DPSPawel PodporaNo ratings yet
- M1 S2 MiBM SiC 213 - SiRSSDocument5 pagesM1 S2 MiBM SiC 213 - SiRSSPawel PodporaNo ratings yet
- M1 S2 MiBM SiC 211 - PRWDDocument4 pagesM1 S2 MiBM SiC 211 - PRWDPawel PodporaNo ratings yet
- E2000 2-3 PieniazekDocument9 pagesE2000 2-3 PieniazekPawel PodporaNo ratings yet
- 34 Pieniazek WspomaganieDocument5 pages34 Pieniazek WspomaganiePawel PodporaNo ratings yet
- R. Fisher - Dochodzac Do TAK - Negocjowanie Bez Poddawania SieDocument254 pagesR. Fisher - Dochodzac Do TAK - Negocjowanie Bez Poddawania SiePawel PodporaNo ratings yet
- Zagrożenia W Ruchu Pojazdów Z WysokDocument12 pagesZagrożenia W Ruchu Pojazdów Z WysokPawel PodporaNo ratings yet
- Helion - Catia V5 Przyklady Efektywnego Zastosowania Systemu W Projektowaniu MechanicznymDocument175 pagesHelion - Catia V5 Przyklady Efektywnego Zastosowania Systemu W Projektowaniu MechanicznymPawel PodporaNo ratings yet
- Modelowanie Brylowe W Systemie Catia Przyklady I Cwiczenia CatmpcDocument44 pagesModelowanie Brylowe W Systemie Catia Przyklady I Cwiczenia CatmpcPawel PodporaNo ratings yet
- CATIA V5. Modelowanie - Kurs PodstawowyDocument128 pagesCATIA V5. Modelowanie - Kurs PodstawowyPawel PodporaNo ratings yet
- Catia v5 Sztuka Modelowania Powierzchniowego Catv5mDocument35 pagesCatia v5 Sztuka Modelowania Powierzchniowego Catv5mPawel PodporaNo ratings yet
- Talmud, Przeł. I Obj. I. Kramstuck, 1869Document98 pagesTalmud, Przeł. I Obj. I. Kramstuck, 1869Strong&PatientNo ratings yet
- Przeczytanki Kreatywne Cwiczenia Z LiteramiDocument52 pagesPrzeczytanki Kreatywne Cwiczenia Z Literamimiatova01No ratings yet
- Licencjat PWDocument83 pagesLicencjat PWJesika MackiewiczNo ratings yet
- KL 7 Matematyka - 18.05 21.05 - kl7Document7 pagesKL 7 Matematyka - 18.05 21.05 - kl7butelkaj38No ratings yet
- Maj OwieDocument2 pagesMaj OwieoliwiaNo ratings yet