You might also like
- SWK211 Notes On VibrationDocument5 pagesSWK211 Notes On VibrationSimphiwe BenyaNo ratings yet
- Chapter 3-2Document14 pagesChapter 3-2Abdalmalek ShamsanNo ratings yet
- Unit - 3 ElectromagnetismDocument9 pagesUnit - 3 ElectromagnetismPavan KumarNo ratings yet
- Harmonically Excited Vibration-Forced VibrationDocument22 pagesHarmonically Excited Vibration-Forced VibrationOk SokNo ratings yet
- Logarithmic Decrement: Consider Eq.8A For Underdamped SystemDocument6 pagesLogarithmic Decrement: Consider Eq.8A For Underdamped SystemVjh GNo ratings yet
- Lecture 21Document38 pagesLecture 21yakwetuNo ratings yet
- ME421-SDF (Forced)Document11 pagesME421-SDF (Forced)JohnathanNo ratings yet
- PR8451-Mechanics of MachinesDocument70 pagesPR8451-Mechanics of MachinesSSMIET DINDIGULNo ratings yet
- Chapter 2-2Document26 pagesChapter 2-2Ahmed Abdulbary AL-QarmNo ratings yet
- ch3 Free Damped Vibration of SDOFDocument15 pagesch3 Free Damped Vibration of SDOFMahmoud Abdelghafar ElhussienyNo ratings yet
- 4 ItjopnrDocument18 pages4 Itjopnrbilkheer driveNo ratings yet
- Logarithmic Decrement: Consider Eq.8A For Underdamped SystemDocument6 pagesLogarithmic Decrement: Consider Eq.8A For Underdamped SystemFahad ChaudharyNo ratings yet
- Single Degree of Freedom System (Damped)Document13 pagesSingle Degree of Freedom System (Damped)Vjh GNo ratings yet
- Lecture 2 Second Lecture 2023Document21 pagesLecture 2 Second Lecture 2023yakwetuNo ratings yet
- Mathematical Modeling of Mechanicalsystem (Spring, Mass, Damper)Document12 pagesMathematical Modeling of Mechanicalsystem (Spring, Mass, Damper)yasinNo ratings yet
- Lec 3 Mechanical SystemDocument33 pagesLec 3 Mechanical SystemFelopateer EmadNo ratings yet
- ME421-MDOF Systems and Equation of MotionDocument11 pagesME421-MDOF Systems and Equation of MotionJohnathanNo ratings yet
- Mass, Energy and Momentum BalancesDocument10 pagesMass, Energy and Momentum BalancesHaidee Ramos EdaNo ratings yet
- Linear Momentum: Momentum Conservation of Momentum CollisionsDocument11 pagesLinear Momentum: Momentum Conservation of Momentum CollisionsHaniNo ratings yet
- ch2 Free Undamped Vibration of SDOFDocument14 pagesch2 Free Undamped Vibration of SDOFMahmoud Abdelghafar ElhussienyNo ratings yet
- Chapter 4 Free Vibrations of Undamped Sdof System 35Document10 pagesChapter 4 Free Vibrations of Undamped Sdof System 35ameena ameeraliNo ratings yet
- Clase Act ElectroMagCirc Linearsys RotMachineDocument9 pagesClase Act ElectroMagCirc Linearsys RotMachinesfasdfNo ratings yet
- L07 - Charge Carrier Density - 1 PDFDocument17 pagesL07 - Charge Carrier Density - 1 PDFakshat mishraNo ratings yet
- Chap 3 Energy Transfer of WaveDocument16 pagesChap 3 Energy Transfer of WaveDilou Le filouNo ratings yet
- Linear Momentum and CollisionsDocument2 pagesLinear Momentum and CollisionsAlex HuynhNo ratings yet
- Mechanical Vibration (ME-411) : Week 05-06Document44 pagesMechanical Vibration (ME-411) : Week 05-06Tariq AlamNo ratings yet
- 5-Impedance of The String-02-03-2023Document6 pages5-Impedance of The String-02-03-2023efewfwedawasNo ratings yet
- Ph101: Physics 1Document19 pagesPh101: Physics 1Shrey GuptaNo ratings yet
- Solution Methodology: FLUENT That Has Been Used in The Study. Details About The Computational ApproachDocument9 pagesSolution Methodology: FLUENT That Has Been Used in The Study. Details About The Computational ApproachSouvik BanerjeeNo ratings yet
- Course 4 Modeling of Dynamic Systems in FDDocument23 pagesCourse 4 Modeling of Dynamic Systems in FDCend AkhinovNo ratings yet
- ES 11 Formula Sheet v1Document3 pagesES 11 Formula Sheet v1Sam RuelosNo ratings yet
- L05 Energy Band TheoryDocument16 pagesL05 Energy Band Theoryashish kumarNo ratings yet
- Low Pass & High Pass Pi Section Filter Lab ManualDocument17 pagesLow Pass & High Pass Pi Section Filter Lab ManualRiya MaityNo ratings yet
- Lecture Two (Free Vibration of Single Degree of Freedom)Document34 pagesLecture Two (Free Vibration of Single Degree of Freedom)edosaNo ratings yet
- Physics Definitions and FormulaeDocument23 pagesPhysics Definitions and Formulae22Y6C36 CHIANG WENXUANNo ratings yet
- Chapter 3-2Document13 pagesChapter 3-2الخليل إبراهيمNo ratings yet
- CKT Unit-IIDocument32 pagesCKT Unit-IIPKNo ratings yet
- Raw:/storage/emulated/0/Download/ES 222 MODULE 5Document29 pagesRaw:/storage/emulated/0/Download/ES 222 MODULE 5Marvin Espenocilla EspeñoNo ratings yet
- Lecture 14Document34 pagesLecture 14yakwetuNo ratings yet
- Undamped Forced VibrationDocument7 pagesUndamped Forced VibrationShilca Geniel BarriosNo ratings yet
- Foundations02 IrregularWaves WheelerStretching DiffractionDocument33 pagesFoundations02 IrregularWaves WheelerStretching DiffractionDTUDownloadNo ratings yet
- Exp 5-7Document10 pagesExp 5-7abdul rehmanNo ratings yet
- FEA Interview Questions Module 1Document22 pagesFEA Interview Questions Module 1Namit MishraNo ratings yet
- 268 - Non-Linear Systems by K. C. Bhuyan PDFDocument35 pages268 - Non-Linear Systems by K. C. Bhuyan PDFManika SahaNo ratings yet
- 268 - Non-Linear Systems by K. C. Bhuyan PDFDocument35 pages268 - Non-Linear Systems by K. C. Bhuyan PDFMeenakshi VenkataramanNo ratings yet
- Chapter 2-3Document15 pagesChapter 2-3الخليل إبراهيمNo ratings yet
- Oscillations & Shock Waves - ME - UPRDocument17 pagesOscillations & Shock Waves - ME - UPRbhansalisujal46No ratings yet
- Physics Ch4 NotesDocument22 pagesPhysics Ch4 NotesAli GorganiNo ratings yet
- UntitledDocument58 pagesUntitledchandrakanth maheshNo ratings yet
- Pushpendra Yadav - Date - 15-02-2023 - Lattice - Dynamics - Classical - PartDocument18 pagesPushpendra Yadav - Date - 15-02-2023 - Lattice - Dynamics - Classical - PartALEX sponsoredNo ratings yet
- Lecture No. 3 - Per-Unit System and Impedance DiagramDocument4 pagesLecture No. 3 - Per-Unit System and Impedance DiagramSteven John De VeraNo ratings yet
- GenPhy SLEM Week 5 2nd Q QATEAM 1Document10 pagesGenPhy SLEM Week 5 2nd Q QATEAM 1Mharbin AsuncionNo ratings yet
- Phy 410 Notes 3 PDFDocument8 pagesPhy 410 Notes 3 PDFprudence.chepngenoNo ratings yet
- LECTURE 2 - Resultants of Force SystemsDocument4 pagesLECTURE 2 - Resultants of Force SystemsCamille SalmasanNo ratings yet
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- Intensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleFrom EverandIntensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleNo ratings yet
- ACI - Crack Calculations PDFDocument3 pagesACI - Crack Calculations PDFAngelo MoralNo ratings yet
- Hydraulics LaboratoryDocument5 pagesHydraulics LaboratoryBernard PalmerNo ratings yet
- Physics Booklet For Jee Neet & Boards: Electrostatics Electric ChargeDocument128 pagesPhysics Booklet For Jee Neet & Boards: Electrostatics Electric ChargedhruvNo ratings yet
- Manual and Solenoid Actuated 2-Way ValvesDocument12 pagesManual and Solenoid Actuated 2-Way ValvesElias100% (1)
- GEA Cassette Geko DF GB PDFDocument40 pagesGEA Cassette Geko DF GB PDFghenceaNo ratings yet
- Dielectric Properties of KDP-type Ferroelectric Crystals in The Presence of External Electric FieldDocument6 pagesDielectric Properties of KDP-type Ferroelectric Crystals in The Presence of External Electric Fieldبكر القرعانيNo ratings yet
- Tugas Strategi Rencana ProsesDocument3 pagesTugas Strategi Rencana ProsesgeafitriaNo ratings yet
- Hdpe Pipe Design PDFDocument27 pagesHdpe Pipe Design PDFAshley Dillon TothNo ratings yet
- Vehicle DynamicsDocument77 pagesVehicle DynamicsShubham SahaiNo ratings yet
- Is 456-2000Document8 pagesIs 456-2000Ram Narendra NathNo ratings yet
- 01 Aero Thrust Pendulum IntroductionDocument40 pages01 Aero Thrust Pendulum IntroductionRooshNo ratings yet
- Buku Introduction To Oceanography PDFDocument276 pagesBuku Introduction To Oceanography PDFmuhammad gilang ramadhanNo ratings yet
- E201: Work, Energy and Power POLICIOUS, Mark Angelo FDocument5 pagesE201: Work, Energy and Power POLICIOUS, Mark Angelo FMark Angelo PoliciosNo ratings yet
- Response Spectrum Calculations Using Ubc 97: Ifzoneis4Document3 pagesResponse Spectrum Calculations Using Ubc 97: Ifzoneis4maheshNo ratings yet
- Variational Principle For A Particle in A BoxDocument4 pagesVariational Principle For A Particle in A BoxajparnaibaNo ratings yet
- Kinematics PDFDocument28 pagesKinematics PDFAmar Ackbar AnthonyNo ratings yet
- (Woodhead Publishing Series in Welding and Other Joining Technologies 6) H. Granjon-Fundamentals of Welding Metallurgy-Woodhead Publishing (1991)Document227 pages(Woodhead Publishing Series in Welding and Other Joining Technologies 6) H. Granjon-Fundamentals of Welding Metallurgy-Woodhead Publishing (1991)Luis Testa75% (4)
- Env Law End TermDocument13 pagesEnv Law End TermSadhvi SinghNo ratings yet
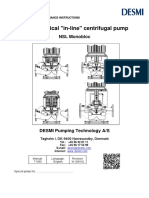
- Desmi Pumps PDFDocument30 pagesDesmi Pumps PDFlunatic20000% (1)
- Foundations of The New Physics, Harald KautzDocument77 pagesFoundations of The New Physics, Harald KautzAniko Gergely-VargaNo ratings yet
- Epolam 5015Document2 pagesEpolam 5015Eduardo JoseNo ratings yet
- Atlas of Namibia - 03 ClimateDocument36 pagesAtlas of Namibia - 03 ClimateCesar Ricardo Lopez ValerioNo ratings yet
- Fluid Flow in Porous Media - Heinemann PDFDocument205 pagesFluid Flow in Porous Media - Heinemann PDFJohn P KNo ratings yet
- Application of Sound Power LevelDocument8 pagesApplication of Sound Power LevelmanchuricoNo ratings yet
- Ac 33 14-1Document128 pagesAc 33 14-1burchandadiNo ratings yet
- Assignment Questions For All UnitsDocument10 pagesAssignment Questions For All UnitsPiyush BhandariNo ratings yet
- 0405 PDFDocument6 pages0405 PDFCris CristyNo ratings yet
- Press Work-Shearing - Bending - Forming - Deep DrawingDocument132 pagesPress Work-Shearing - Bending - Forming - Deep DrawingAashiq Salu ThekkinedathNo ratings yet
- Quantum MechanicsDocument48 pagesQuantum MechanicsFlor Hernandez TiscareñoNo ratings yet
- Biosci 106: The Chemical Basis of LifeDocument30 pagesBiosci 106: The Chemical Basis of LifeChengNo ratings yet