You might also like
- 12-ENGG 410 CHAPTER 8 - Part 3Document6 pages12-ENGG 410 CHAPTER 8 - Part 3Joana Rosette TordecillaNo ratings yet
- Mechanics and Materials: Chapter 6: BendingDocument28 pagesMechanics and Materials: Chapter 6: BendingMuhammad Mumtaz AhmadNo ratings yet
- Ch. - 4 - Combined StressDocument2 pagesCh. - 4 - Combined StressJibril JundiNo ratings yet
- Straight Lines: MATH101A) Course Teacher - DIPOK DEBDocument10 pagesStraight Lines: MATH101A) Course Teacher - DIPOK DEB1918 Sakiba NawarNo ratings yet
- SNBT EssentialsDocument7 pagesSNBT EssentialsBreak PAWNo ratings yet
- Figure 3-8: Mohr's Circle For Plane StressDocument7 pagesFigure 3-8: Mohr's Circle For Plane StressHamood Al-bahraniNo ratings yet
- 3-D Transformational Geometry: 6.1 Scale and TranslationDocument20 pages3-D Transformational Geometry: 6.1 Scale and TranslationQubecumbers - MinecraftNo ratings yet
- Line Plots PresentationDocument23 pagesLine Plots PresentationJordan JohnsonNo ratings yet
- Recitation 1Document4 pagesRecitation 1mateo durNo ratings yet
- 04 - Shear of Thin Walled Sections and Shear CentreDocument23 pages04 - Shear of Thin Walled Sections and Shear CentrePythonraptorNo ratings yet
- Coordinate Geometry Mind MapDocument42 pagesCoordinate Geometry Mind MapOm SonawaneNo ratings yet
- Mit - 1998-01 (1) Shear Stress in BeamsDocument31 pagesMit - 1998-01 (1) Shear Stress in BeamsabdullahNo ratings yet
- 13: Trigonometry Ii: Graphs of Trigonometric FunctionsDocument11 pages13: Trigonometry Ii: Graphs of Trigonometric FunctionsInspire The PeopleNo ratings yet
- Chapter 4 - Bending of Straight BeamsDocument40 pagesChapter 4 - Bending of Straight Beamsmuhamad mukhdiNo ratings yet
- Lesson 2: The Flexure Formula: Bending Deformation of A Straight MemberDocument10 pagesLesson 2: The Flexure Formula: Bending Deformation of A Straight MemberJor DanNo ratings yet
- Hibbeler-StaMoM-SI Units 06 - PROPERTY of CROSS SECTIONDocument43 pagesHibbeler-StaMoM-SI Units 06 - PROPERTY of CROSS SECTIONTeresa Agitha HerdinaNo ratings yet
- Algebra and Trigonometry 10th Edition Larson Solutions ManualDocument11 pagesAlgebra and Trigonometry 10th Edition Larson Solutions Manualnotefulaculeate.8kbrvp100% (40)
- Linear Function Education Presentation in A Yellow Red and Blue Gridded StyleDocument22 pagesLinear Function Education Presentation in A Yellow Red and Blue Gridded StyleRizkyNo ratings yet
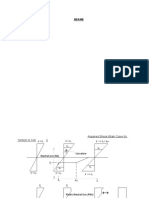
- Beams: Assumed Stress-Strain Curve (In Tension or Compression) ε ε ε >> ε > ε ε > ε ε = εDocument14 pagesBeams: Assumed Stress-Strain Curve (In Tension or Compression) ε ε ε >> ε > ε ε > ε ε = εEhsan WasimNo ratings yet
- Curved BeamsDocument8 pagesCurved BeamsAnonymous EKqkRJsJNNo ratings yet
- 6 SYSC5602 Z Transform 2009Document49 pages6 SYSC5602 Z Transform 2009SmartunblurrNo ratings yet
- Center of Gravity and Centroid: Chapter ObjectivesDocument16 pagesCenter of Gravity and Centroid: Chapter ObjectivesMahi PathakNo ratings yet
- 3 D TransformationDocument10 pages3 D TransformationShaurya KapoorNo ratings yet
- Chapter 6-Bending AnnotatedDocument52 pagesChapter 6-Bending AnnotatedOsvaldo IzataNo ratings yet
- Ch. - 5 - DeflectionsDocument5 pagesCh. - 5 - DeflectionsJibril JundiNo ratings yet
- Poster 2024Document1 pagePoster 2024Zain AteeqNo ratings yet
- MDPN262 Lecture 1Document48 pagesMDPN262 Lecture 1Mark Nassef NaguibNo ratings yet
- Stress Transformation and Circular Beam Under Combined LoadingDocument11 pagesStress Transformation and Circular Beam Under Combined Loadingkostas.sierros9374No ratings yet
- Cone CalculationDocument22 pagesCone CalculationGaneshalingam Ramprasanna1No ratings yet
- Bending of Beams With Unsymmetrical SectionsDocument7 pagesBending of Beams With Unsymmetrical SectionsArifsalimNo ratings yet
- Chapter 7 The ParabolaDocument37 pagesChapter 7 The ParabolaVihanga RuwanmalNo ratings yet
- Physics Data Analysis 2023Document11 pagesPhysics Data Analysis 2023jigemkamahNo ratings yet
- Untitled 1Document7 pagesUntitled 1bulitukNo ratings yet
- Chapter 8Document7 pagesChapter 8ajayNo ratings yet
- S s-5 Lines in A PlaneDocument3 pagesS s-5 Lines in A Planeapi-253679034No ratings yet
- Shear and Moment in BeamsDocument8 pagesShear and Moment in BeamsKimberly Jane MitraNo ratings yet
- Adobe Scan Mar 29, 2024Document9 pagesAdobe Scan Mar 29, 2024k.v.v.satyanarayanaNo ratings yet
- DOME-2 Notes QPapers PDFDocument305 pagesDOME-2 Notes QPapers PDFSumit KumarNo ratings yet
- 4 Pure Bending (2022)Document59 pages4 Pure Bending (2022)YAŞAR MERT DOĞANAYNo ratings yet
- Useful Beam EquationsDocument8 pagesUseful Beam EquationsAXCNo ratings yet
- Examples of Change of Basis and Matrix Transformations. Quadratic FormsDocument12 pagesExamples of Change of Basis and Matrix Transformations. Quadratic FormsAnonymous 9q5GEfm8INo ratings yet
- Bianchi Identities: R G G G GDocument5 pagesBianchi Identities: R G G G GMd ShawonNo ratings yet
- Shear Corr 2001 PDFDocument20 pagesShear Corr 2001 PDFCHILAKAPATI ANJANEYULUNo ratings yet
- Chap 6 Unsymmetric BendingDocument10 pagesChap 6 Unsymmetric BendingRUGERO KeslyneNo ratings yet
- Graph Multiplication MethodDocument10 pagesGraph Multiplication MethodRakshit SelotNo ratings yet
- Shear CenterDocument24 pagesShear Centerhbuyhbuy100% (1)
- Handouts 2 Bending StressDocument7 pagesHandouts 2 Bending Stresssureyya.yusifovaNo ratings yet
- Business Statistics by Gupta 365 379Document15 pagesBusiness Statistics by Gupta 365 379KowsalyaNo ratings yet
- Analisa Struktur 1 - Minggu 1-3 (Metode Integrasi)Document72 pagesAnalisa Struktur 1 - Minggu 1-3 (Metode Integrasi)Adinda PutriNo ratings yet
- Dwnload Full College Algebra 10th Edition Larson Solutions Manual PDFDocument35 pagesDwnload Full College Algebra 10th Edition Larson Solutions Manual PDFouthaulpreter6cdttp100% (10)
- Problem 9.32Document1 pageProblem 9.32ddiegorj88No ratings yet
- 41695-7. Three Dimensional Geometric & Modeling TransformationsDocument5 pages41695-7. Three Dimensional Geometric & Modeling Transformationsparatevedant1403No ratings yet
- 119TRIG Notes 2Document9 pages119TRIG Notes 2Riza Mae BayoNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Cohomology of Quotients in Symplectic and Algebraic Geometry. (MN-31), Volume 31From EverandCohomology of Quotients in Symplectic and Algebraic Geometry. (MN-31), Volume 31No ratings yet
- Mathematical Analysis 1: theory and solved exercisesFrom EverandMathematical Analysis 1: theory and solved exercisesRating: 5 out of 5 stars5/5 (1)
- Chapter 5Document7 pagesChapter 5syakirah iwanaNo ratings yet
- Biaxial Interference Figures F12Document20 pagesBiaxial Interference Figures F12dcegarciamapuaNo ratings yet
- ClassWork 03 Multi Way ANOVA - SolDocument31 pagesClassWork 03 Multi Way ANOVA - SolMohamad HarazeenNo ratings yet
- Statistical Mechanics, Eugene A. Lim KING'S COLLEGE LONDON 2020Document117 pagesStatistical Mechanics, Eugene A. Lim KING'S COLLEGE LONDON 2020José FilhoNo ratings yet
- Multi-Cantilever HEMT-based Resonant Sensor: Irina Khmyrova, and Elena ShestakovaDocument4 pagesMulti-Cantilever HEMT-based Resonant Sensor: Irina Khmyrova, and Elena ShestakovaQuan LinhNo ratings yet
- StarsDocument26 pagesStarsSally CustodioNo ratings yet
- Figure 1 LP02 Second Class PyranometerDocument2 pagesFigure 1 LP02 Second Class PyranometerKaren Juliana Espinosa ValeroNo ratings yet
- Samle Log Sheet (98f0001)Document6 pagesSamle Log Sheet (98f0001)Ajin SNo ratings yet
- MagnetosDocument339 pagesMagnetosrobertocadenaNo ratings yet
- 1.1 WaveDocument87 pages1.1 WavePeggy Esther YongNo ratings yet
- Gen Math Learning CompetenciesDocument4 pagesGen Math Learning CompetenciesMARLA FIRMALINONo ratings yet
- Board Question Paper: July 2019: PhysicsDocument3 pagesBoard Question Paper: July 2019: PhysicsMahendra ShahNo ratings yet
- MEE 323 - Test ONE (2019&20 Session) SolutionDocument2 pagesMEE 323 - Test ONE (2019&20 Session) SolutionPeter SamuelNo ratings yet
- Mathematical Modeling: Polydisciplinary Faculy of Nador Master of Modeling and Scientific ComputingDocument17 pagesMathematical Modeling: Polydisciplinary Faculy of Nador Master of Modeling and Scientific ComputingMâ JdåNo ratings yet
- Solms - New ProjectDocument32 pagesSolms - New ProjectHugo Tannous Jorge100% (1)
- Evsjv ' Ki F Vu e e 'VQ Ms V II Cö Íve: 2021-22 A - ©-Eq II Ev RU KVH© GDocument112 pagesEvsjv ' Ki F Vu e e 'VQ Ms V II Cö Íve: 2021-22 A - ©-Eq II Ev RU KVH© GDaud FaraizyNo ratings yet
- Cheryl reyes-ACTIVITYDocument4 pagesCheryl reyes-ACTIVITYCheryl ReyesNo ratings yet
- ThermoDocument62 pagesThermoTUSHIT JHANo ratings yet
- Infinite Series and The Residue Theorem: Noah A. Hughes May 7, 2013Document12 pagesInfinite Series and The Residue Theorem: Noah A. Hughes May 7, 2013jerson campos100% (1)
- Exhibition Stand - REV 0Document12 pagesExhibition Stand - REV 0shibu4321No ratings yet
- Assessment of GPS Radiosonde Descent Data: Atmospheric Measurement TechniquesDocument15 pagesAssessment of GPS Radiosonde Descent Data: Atmospheric Measurement TechniquesmdbashaNo ratings yet
- Architectural Design of Future Sustainable Primary School in Iran Using Multi-Purpose AtriumDocument4 pagesArchitectural Design of Future Sustainable Primary School in Iran Using Multi-Purpose AtriumThắm PhạmNo ratings yet
- Physics Lab-Viva QuestionsDocument11 pagesPhysics Lab-Viva Questionsseion vaneNo ratings yet
- Problem Set 5Document2 pagesProblem Set 5ifireNo ratings yet
- Math Motivational Quotes For YouDocument1 pageMath Motivational Quotes For YouMauro UbungenNo ratings yet
- Spardha Mehta - Report On Bulk Active StructuresDocument18 pagesSpardha Mehta - Report On Bulk Active StructuresSpradha Mehta100% (1)
- Shreedhar T-BeamDocument10 pagesShreedhar T-BeamSudip PathakNo ratings yet
- High Shear Dispersion Technology Prior To Twin Roll Casting For HighDocument10 pagesHigh Shear Dispersion Technology Prior To Twin Roll Casting For HighVidya me20d015No ratings yet
- Solution Manual Analysis and Design of Machine Elements by Wei JiangDocument4 pagesSolution Manual Analysis and Design of Machine Elements by Wei Jiangindustriale82No ratings yet
- Mathematics 7 3 Quarter: Learning Area Grade Level Quarter DateDocument4 pagesMathematics 7 3 Quarter: Learning Area Grade Level Quarter Datealdrin sabinoNo ratings yet