You might also like
- Ebook How To Design and Evaluate Research in Education 11Th Edition PDF Full Chapter PDFDocument67 pagesEbook How To Design and Evaluate Research in Education 11Th Edition PDF Full Chapter PDFwayne.edwardson742100% (25)
- Pipe Network AnalysisDocument32 pagesPipe Network AnalysisRANJINI02VNo ratings yet
- An Approach For Determining Frequency Deviations in AGCDocument7 pagesAn Approach For Determining Frequency Deviations in AGCddpc.npcc3No ratings yet
- The Application of Sliding Mode Control With Improved Approaching Law in Manipulator ControlDocument6 pagesThe Application of Sliding Mode Control With Improved Approaching Law in Manipulator Controljonathan0713twNo ratings yet
- Mehmood 2020Document5 pagesMehmood 2020Milton AlvaradoNo ratings yet
- Research On PMSM Speed Control System Based On Improved Reaching LawDocument6 pagesResearch On PMSM Speed Control System Based On Improved Reaching LawSatyam GuptaNo ratings yet
- Research On Precise Voltage Regulation Control Strategy of High and Low Voltage Ride Through Test Device of InverterDocument5 pagesResearch On Precise Voltage Regulation Control Strategy of High and Low Voltage Ride Through Test Device of InverterAKPAM MICHEAL YABANo ratings yet
- Research On Position Servo System Based On FractioDocument10 pagesResearch On Position Servo System Based On FractioS AbdNo ratings yet
- Crossmark: Control Engineering PracticeDocument13 pagesCrossmark: Control Engineering PracticeLê Đức ThịnhNo ratings yet
- Huang 2014Document10 pagesHuang 2014Gifhar RahmanNo ratings yet
- Paper 3Document8 pagesPaper 3Aisha ShaikhNo ratings yet
- Zhang 2020Document11 pagesZhang 2020Lê Đức ThịnhNo ratings yet
- Machine SynchroneDocument10 pagesMachine SynchronehaceneNo ratings yet
- A New Reaching Law For Anti-Disturbance Sliding-Mode Control of PMSM Speed Regula-Tion SystemDocument10 pagesA New Reaching Law For Anti-Disturbance Sliding-Mode Control of PMSM Speed Regula-Tion SystemAmar SajiNo ratings yet
- Steering Control of An Autonomous Underwater Vehicle Using SMC TechniquesDocument5 pagesSteering Control of An Autonomous Underwater Vehicle Using SMC TechniquesSuman SahaNo ratings yet
- 10 1109@tie 2020 3005074Document9 pages10 1109@tie 2020 3005074Nguyễn Văn HoàNo ratings yet
- Trajectory Tracking Control For Flapping-Wing UAV Based On Model-Free Predictive ControlDocument8 pagesTrajectory Tracking Control For Flapping-Wing UAV Based On Model-Free Predictive Controlchandra sekharNo ratings yet
- Design of Motor Shaft Power Meter Based On Phase Detection Using Improved All Phase FFTDocument6 pagesDesign of Motor Shaft Power Meter Based On Phase Detection Using Improved All Phase FFTGERALD ELIAS MASS MENDEZNo ratings yet
- Angular Speed Control of Brushed DC Motor Using Nonlinear Method: Design and ExperimentDocument6 pagesAngular Speed Control of Brushed DC Motor Using Nonlinear Method: Design and ExperimentAl-ShukaNo ratings yet
- Li 2021Document5 pagesLi 2021ravvacharan30No ratings yet
- Design of ROV Adaptive Sliding Mode Control System For Underwater Vehicle Based On RBF Neural NetworkDocument6 pagesDesign of ROV Adaptive Sliding Mode Control System For Underwater Vehicle Based On RBF Neural Networkayhan mentesNo ratings yet
- Research of Boost Converter Sliding Mode Control Method Based On Exponential Reaching LawDocument4 pagesResearch of Boost Converter Sliding Mode Control Method Based On Exponential Reaching LawAditi KarvekarNo ratings yet
- Robust Predictive Current Control For A Sensorless IM Drive Based On Torque Angle RegulationDocument7 pagesRobust Predictive Current Control For A Sensorless IM Drive Based On Torque Angle RegulationDanielle GontijoNo ratings yet
- J Conengprac 2017 01 001Document7 pagesJ Conengprac 2017 01 001ali bendlalaNo ratings yet
- Zheng Wei 2023 Research On Active Disturbance Rejection Control Strategy of Electric Power Steering System UnderDocument11 pagesZheng Wei 2023 Research On Active Disturbance Rejection Control Strategy of Electric Power Steering System Underkhalil bouadilaNo ratings yet
- Machines 10 01071 v2Document17 pagesMachines 10 01071 v2jim campbellNo ratings yet
- Frequency Regulation For PV SystemDocument5 pagesFrequency Regulation For PV SystemEJAZ AHMADNo ratings yet
- An Efficient Route Control Model of The Train-Centric Control SystemDocument6 pagesAn Efficient Route Control Model of The Train-Centric Control Systemmanojgsm33No ratings yet
- A New Exponential Power Combined Reaching Law Sliding-Mode Control For Permanent Magnet Synchronous MotorDocument6 pagesA New Exponential Power Combined Reaching Law Sliding-Mode Control For Permanent Magnet Synchronous MotorAditi KarvekarNo ratings yet
- Xia 2020Document14 pagesXia 2020Hafeez Ul NaqiNo ratings yet
- Model-Based Speed Control of A DC Motor Using A Combined Control SchemeDocument6 pagesModel-Based Speed Control of A DC Motor Using A Combined Control SchemeDhaivat BhattNo ratings yet
- Trajectory Tracking Control of Autonomous Vehicle With Random Network DelayDocument10 pagesTrajectory Tracking Control of Autonomous Vehicle With Random Network DelayKu BiNo ratings yet
- A Novel Model Predictive Control Strategy To EliminateDocument12 pagesA Novel Model Predictive Control Strategy To EliminateRodovarNo ratings yet
- New Method of Vector Control in PMSM MotorsDocument9 pagesNew Method of Vector Control in PMSM Motorsdoni eka saputraNo ratings yet
- Actuators 11 00117Document22 pagesActuators 11 00117Phanxay ChanthavongNo ratings yet
- Position Tracking Control of PMSM Based On FuzzyDocument16 pagesPosition Tracking Control of PMSM Based On FuzzyLê Đức ThịnhNo ratings yet
- Trajectory-Tracking Control of Mobile Robot Systems Incorporating Neural-Dynamic Optimized Model Predictive ApproachDocument10 pagesTrajectory-Tracking Control of Mobile Robot Systems Incorporating Neural-Dynamic Optimized Model Predictive ApproachYasir ButtNo ratings yet
- Adaptive Sliding Mode Control With PerturbationDocument13 pagesAdaptive Sliding Mode Control With Perturbationshakti_0001No ratings yet
- SMC DobDocument9 pagesSMC DobNguyễn Văn HoàNo ratings yet
- Position Control For Permanent Magnet Synchronous Motor Based On Neural Network and Terminal Sliding Mode ControlDocument9 pagesPosition Control For Permanent Magnet Synchronous Motor Based On Neural Network and Terminal Sliding Mode ControlLê Đức ThịnhNo ratings yet
- Force Observer-Based Admittance Control Design For Robot ManipulatorsDocument4 pagesForce Observer-Based Admittance Control Design For Robot ManipulatorsSaleem RiazNo ratings yet
- 01 Actuators-10-00147Document16 pages01 Actuators-10-00147fvijayamiNo ratings yet
- Modified Control of Virtual Synchronous Generator For Microgrid Stability ImprovementDocument5 pagesModified Control of Virtual Synchronous Generator For Microgrid Stability ImprovementNishithaNo ratings yet
- Dynamic Tracking Performance of Servo Mechanisms BDocument13 pagesDynamic Tracking Performance of Servo Mechanisms BRaquel CadenasNo ratings yet
- Studies On Fault Influence of Yindong HVDC Transmission System in Shandong Power Grid Based On PSCADDocument7 pagesStudies On Fault Influence of Yindong HVDC Transmission System in Shandong Power Grid Based On PSCADas147No ratings yet
- Sensors 22 08240 v2Document14 pagesSensors 22 08240 v2Abd Ur RehmanNo ratings yet
- MPC Milling Elsevierchatter19Document16 pagesMPC Milling Elsevierchatter19Carlos Eduardo Sanchez CuevasNo ratings yet
- Disturbance Observer Based Integral Terminal Sliding Mode Control For Permanent Magnet Synchronous Motor SystemDocument19 pagesDisturbance Observer Based Integral Terminal Sliding Mode Control For Permanent Magnet Synchronous Motor SystemHarshitha AspariNo ratings yet
- 2022 - Model-Free Repetitive Control Design and Implementation For Dynamical Galvanometer-Based Raster ScanningDocument11 pages2022 - Model-Free Repetitive Control Design and Implementation For Dynamical Galvanometer-Based Raster Scanningcjws80293No ratings yet
- Yao 2020Document7 pagesYao 2020Hiển TrầnNo ratings yet
- Base Paper 2020Document4 pagesBase Paper 2020leninNo ratings yet
- Zhang 2020Document13 pagesZhang 2020Mou KhalilNo ratings yet
- 4 HosseiniDocument6 pages4 Hosseinipc hosseinNo ratings yet
- Wang 2020Document10 pagesWang 2020BRUNO ALEXIS ALCANTARA TACORANo ratings yet
- 01 International Journal of Control 2017 Robust Model Predictive Control For Constrained Continuous Time NonlinearDocument17 pages01 International Journal of Control 2017 Robust Model Predictive Control For Constrained Continuous Time NonlinearNguyễn Xuân KhảiNo ratings yet
- A Review of State of The Art Techniques For PMSM Parameter IdentificationDocument11 pagesA Review of State of The Art Techniques For PMSM Parameter IdentificationDHRUV UPADHAYANo ratings yet
- On-Line Set-Point Optimisation and Predictive Control Using Neural Hammerstein ModelsDocument19 pagesOn-Line Set-Point Optimisation and Predictive Control Using Neural Hammerstein Modelssasanchez3No ratings yet
- Model Predictive Control of Two Mass Resonant Mechanical System Optimized by Neural NetworkDocument6 pagesModel Predictive Control of Two Mass Resonant Mechanical System Optimized by Neural Networkjunjie wuNo ratings yet
- Jonnalagadda Elumalai 2023 Nonlinear Stabilization and Reference Tracking of Visual Servo System Using Ts FuzzyDocument15 pagesJonnalagadda Elumalai 2023 Nonlinear Stabilization and Reference Tracking of Visual Servo System Using Ts FuzzydangquanginhaNo ratings yet
- PCACCSMDec 2021Document33 pagesPCACCSMDec 2021devin.ezekiel2003No ratings yet
- Permanent Magnet Brushless Motor Field Oriented Control With Dither Signal InjectionDocument4 pagesPermanent Magnet Brushless Motor Field Oriented Control With Dither Signal InjectionTony starkNo ratings yet
- Introduction to Control System Performance Measurements: The Commonwealth and International Library: Automatic Control DivisionFrom EverandIntroduction to Control System Performance Measurements: The Commonwealth and International Library: Automatic Control DivisionNo ratings yet
- Xia 2020Document14 pagesXia 2020Hafeez Ul NaqiNo ratings yet
- Tpel 2020 3007829Document9 pagesTpel 2020 3007829Hafeez Ul NaqiNo ratings yet
- Torque ControlDocument11 pagesTorque ControlHafeez Ul NaqiNo ratings yet
- Resume of Hse ManagerDocument9 pagesResume of Hse ManagerHafeez Ul NaqiNo ratings yet
- Module 4: Plant Growth Factors and Latest Trend in Crop ScienceDocument26 pagesModule 4: Plant Growth Factors and Latest Trend in Crop ScienceNorhanah Dionisio BarubaNo ratings yet
- Choosing A Well Format Contents and Storage: Quick Reference Pub. No. MAN0009818 Rev. C.0Document4 pagesChoosing A Well Format Contents and Storage: Quick Reference Pub. No. MAN0009818 Rev. C.0silmaril trehNo ratings yet
- Cost-Volume-Profit Relationships: Mcgraw-Hill /irwinDocument82 pagesCost-Volume-Profit Relationships: Mcgraw-Hill /irwinXu FengNo ratings yet
- Hood Vents InstallationDocument12 pagesHood Vents Installationapi-26140644No ratings yet
- Speed PDFDocument1 pageSpeed PDFhendrik koesumaNo ratings yet
- FreeNAS 11.2Document370 pagesFreeNAS 11.2phong nguyen huuNo ratings yet
- Apti and Interview PreparationDocument12 pagesApti and Interview Preparationchaitalichoudhary20No ratings yet
- Optimization of Material Handling Trolley Using Finite Element AnalysisDocument13 pagesOptimization of Material Handling Trolley Using Finite Element AnalysisRumah WayangNo ratings yet
- Bobine D'allumage TondeuseDocument15 pagesBobine D'allumage TondeuseThierry AvikianNo ratings yet
- PWV3Document36 pagesPWV3Tony AppsNo ratings yet
- Chapter4 OF mATERIAL ENGINEERINGDocument6 pagesChapter4 OF mATERIAL ENGINEERINGaljhun fujitsuNo ratings yet
- Crack High Level - Puzzle Question 2019 - Edition 3 PDFDocument179 pagesCrack High Level - Puzzle Question 2019 - Edition 3 PDFHemant Sarva80% (5)
- Reappraisal of The Autoclave Expansion TestDocument26 pagesReappraisal of The Autoclave Expansion TestCristián JiménezNo ratings yet
- Workplace Injuries - Kind of Accident (LFSINJKND)Document22 pagesWorkplace Injuries - Kind of Accident (LFSINJKND)Osman KantheNo ratings yet
- Interrupts and Traps in Oberon-ARMDocument3 pagesInterrupts and Traps in Oberon-ARMmqt99311zwoho.comNo ratings yet
- Aggregate Crushing ValueDocument8 pagesAggregate Crushing ValueEngineeri TadiyosNo ratings yet
- Sist-En-13001-2-2014 NFDocument15 pagesSist-En-13001-2-2014 NF정주호No ratings yet
- Worksheet On Carboxylic AcidsDocument3 pagesWorksheet On Carboxylic AcidsmalisnotokNo ratings yet
- Pipelife Long Length PE Pipe SystemsDocument28 pagesPipelife Long Length PE Pipe SystemsAhceneNo ratings yet
- 4423 Chapter 1 Part 3 IDMTDocument51 pages4423 Chapter 1 Part 3 IDMTMuslim DadNo ratings yet
- Market Technician No63Document12 pagesMarket Technician No63ppfahdNo ratings yet
- Impact Loads On A Self-Elevating Unit During Jacking OperationDocument84 pagesImpact Loads On A Self-Elevating Unit During Jacking OperationMILADNo ratings yet
- Datasheet Eaton 93 STS - Static Transfer SwitchDocument2 pagesDatasheet Eaton 93 STS - Static Transfer SwitchWilliam QuintelaNo ratings yet
- Lcs Lab 9 M.ZahadatDocument17 pagesLcs Lab 9 M.ZahadatAhmed Hassan RajpootNo ratings yet
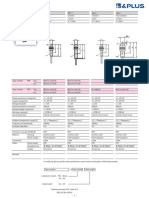
- B&Plus Proximity Sensor - 001.BES07e - Usm8-1Document1 pageB&Plus Proximity Sensor - 001.BES07e - Usm8-1Hussein RamzaNo ratings yet
- 1448 Data Gmet6 25eph Pfep191022 Forktruck 191024Document227 pages1448 Data Gmet6 25eph Pfep191022 Forktruck 191024Gustavo FerrerNo ratings yet
- 9 - ATPL Questions MeteorologyDocument99 pages9 - ATPL Questions MeteorologyRitwik Chowdhury100% (1)
- Be Summer 2012Document2 pagesBe Summer 2012babaf79912No ratings yet