You might also like
- Assignment 5 SolutionsDocument9 pagesAssignment 5 SolutionsNengke Lin100% (1)
- OptimizationDocument5 pagesOptimizationsweetie05No ratings yet
- Lec1 9Document14 pagesLec1 9Momal IshaqNo ratings yet
- SQ Multiobjective Programming ProblemDocument8 pagesSQ Multiobjective Programming ProblemKhang Trương TuấnNo ratings yet
- Combinatorial Optimization: Sheet 1Document5 pagesCombinatorial Optimization: Sheet 1Subhash KorumilliNo ratings yet
- MIT MicroDocument42 pagesMIT MicroTanuj SinghNo ratings yet
- Assignment 5Document3 pagesAssignment 5Minh LuanNo ratings yet
- Advanced Algorithms Course. Lecture Notes. Part 3: Addendum: Weighted Hitting SetDocument4 pagesAdvanced Algorithms Course. Lecture Notes. Part 3: Addendum: Weighted Hitting SetKasapaNo ratings yet
- Support Vector Machines PDFDocument5 pagesSupport Vector Machines PDFNageswararao EluriNo ratings yet
- Choice MA Consumer 2 17Document39 pagesChoice MA Consumer 2 17Ramiro Cohen KichikNo ratings yet
- 02 ECON5210 Lecture 2 Final VersionDocument30 pages02 ECON5210 Lecture 2 Final VersionYuet Ning ChauNo ratings yet
- Lecture 4: Perceptrons and Multilayer Perceptrons: Cognitive Systems II - Machine Learning SS 2005Document25 pagesLecture 4: Perceptrons and Multilayer Perceptrons: Cognitive Systems II - Machine Learning SS 2005HakanKalaycıNo ratings yet
- Algorithm Design Paradigms (Dynamic Programming)Document68 pagesAlgorithm Design Paradigms (Dynamic Programming)dasdNo ratings yet
- Lecture7 2021Document22 pagesLecture7 2021Yanjing PengNo ratings yet
- Linear Regression and Classification: Lectures 3-4Document41 pagesLinear Regression and Classification: Lectures 3-4ValNo ratings yet
- Chapter 4 Dynamic ProgrammingDocument49 pagesChapter 4 Dynamic ProgrammingBonsa MesganawNo ratings yet
- EedyDocument15 pagesEedyvedantlfcNo ratings yet
- Clustering With Gradient Descent: 1 PerformanceDocument4 pagesClustering With Gradient Descent: 1 PerformanceChristine StraubNo ratings yet
- Discrete (And Continuous) Optimization WI4 131: November - December, A.D. 2004Document17 pagesDiscrete (And Continuous) Optimization WI4 131: November - December, A.D. 2004Anonymous N3LpAXNo ratings yet
- IEOR E4007 December 10, 2021 G. IyengarDocument4 pagesIEOR E4007 December 10, 2021 G. IyengarKiKi ChenNo ratings yet
- Approx Lecture03-5 LPDocument9 pagesApprox Lecture03-5 LPatemp9595No ratings yet
- 3386 Notes 2 04Document3 pages3386 Notes 2 04Paulo Vitor Antonacci MouraNo ratings yet
- Homework2 v1.0Document5 pagesHomework2 v1.0royadaneshi2001No ratings yet
- Log-Linear Models, Memms, and CRFS: 1 NotationDocument11 pagesLog-Linear Models, Memms, and CRFS: 1 NotationAnshuman MitraNo ratings yet
- Ariel Rubinstein: Lecture Notes in Microeconomic TheoryDocument17 pagesAriel Rubinstein: Lecture Notes in Microeconomic TheorysamuelifamilyNo ratings yet
- Algorithm To CHKDocument14 pagesAlgorithm To CHKrajkumar.manjuNo ratings yet
- coursSVM Versionlongue 20Document70 pagescoursSVM Versionlongue 20dorianNo ratings yet
- Unit 3Document21 pagesUnit 3Dr. Nageswara Rao EluriNo ratings yet
- Supervised Learning Neural NetworksDocument34 pagesSupervised Learning Neural NetworksLekshmiNo ratings yet
- Chapter 4 Dynamic ProgrammingDocument47 pagesChapter 4 Dynamic ProgrammingabenimelosNo ratings yet
- Homework 1Document3 pagesHomework 1Anh HoangNo ratings yet
- Op Tim Ization 2015Document62 pagesOp Tim Ization 2015jp14041994No ratings yet
- Deutsch-Jozsa Algorithm PDFDocument7 pagesDeutsch-Jozsa Algorithm PDFPRAGYA CHANDAKNo ratings yet
- A Problem Course in Metric SpacesDocument19 pagesA Problem Course in Metric SpacesAnubrata DattaNo ratings yet
- Economics 201b Spring 2010 Problem Set 4 SolutionsDocument15 pagesEconomics 201b Spring 2010 Problem Set 4 SolutionsTariq SultanNo ratings yet
- Nonlinear Programming 3rd Edition Theoretical Solutions ManualDocument33 pagesNonlinear Programming 3rd Edition Theoretical Solutions ManualJigo CasteloNo ratings yet
- Variational Formulation For Linear and Nonlinear Problems: DR - Sami. H.AltoumDocument5 pagesVariational Formulation For Linear and Nonlinear Problems: DR - Sami. H.Altoumwww.irjes.comNo ratings yet
- HW 4Document7 pagesHW 4Angel AvilaNo ratings yet
- Y. Pochet R. Weismantel: CORE and IAG, Universit e Catholique de Louvain, BelgiumDocument24 pagesY. Pochet R. Weismantel: CORE and IAG, Universit e Catholique de Louvain, BelgiumArpit SinghNo ratings yet
- Duality and Sensitivity: October 6, 2008Document23 pagesDuality and Sensitivity: October 6, 2008Samuel Alfonzo Gil BarcoNo ratings yet
- Duality and Sensitivity: October 6, 2008Document23 pagesDuality and Sensitivity: October 6, 2008Samuel Alfonzo Gil BarcoNo ratings yet
- Greedy MethodDocument20 pagesGreedy MethoddevarajNo ratings yet
- A Robust Option Pricing ProblemDocument41 pagesA Robust Option Pricing Problemkaranloves1942No ratings yet
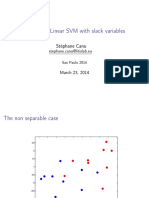
- Lecture3 Linear SVM With SlackDocument32 pagesLecture3 Linear SVM With SlackUma TamilNo ratings yet
- Exercise Sheet 1: Quantum Information - Summer Semester 2020Document2 pagesExercise Sheet 1: Quantum Information - Summer Semester 2020Kiran AdhikariNo ratings yet
- Advanced Microeconomics: Leonardo FelliDocument48 pagesAdvanced Microeconomics: Leonardo Fellidonne4realNo ratings yet
- Greedy Method: Feasible Solution, We Mean A Subset of The Solution Space OnDocument7 pagesGreedy Method: Feasible Solution, We Mean A Subset of The Solution Space OnManoj KumarNo ratings yet
- Mathematics For Economics: Euncheol ShinDocument14 pagesMathematics For Economics: Euncheol ShinLuis Fernando Ramirez RodriguezNo ratings yet
- Strong Duality Results: September 22, 2008Document17 pagesStrong Duality Results: September 22, 2008Samuel Alfonzo Gil BarcoNo ratings yet
- Canonical Problem Forms: Ryan Tibshirani Convex Optimization 10-725Document27 pagesCanonical Problem Forms: Ryan Tibshirani Convex Optimization 10-725Saheli ChakrabortyNo ratings yet
- Discrete Optimization Lecture Notes 3Document2 pagesDiscrete Optimization Lecture Notes 3BertvdvenNo ratings yet
- Economics 201b Spring 2010 Problem Set 4 SolutionsDocument15 pagesEconomics 201b Spring 2010 Problem Set 4 SolutionsgizNo ratings yet
- Daa - Unit 3 1Document26 pagesDaa - Unit 3 1Milda BabuNo ratings yet
- EC411 Slides 1Document92 pagesEC411 Slides 1Afwan AhmedNo ratings yet
- 2021 Book Tach Part7 PaperportfolioDocument8 pages2021 Book Tach Part7 PaperportfolioKhang Trương TuấnNo ratings yet
- Optimization Methods: Jose Cordova-Garcia, PH.DDocument21 pagesOptimization Methods: Jose Cordova-Garcia, PH.DEduardo Luis Chancay RojasNo ratings yet
- Lecture 8: Strong Duality: 8.1.1 Primal and Dual ProblemsDocument9 pagesLecture 8: Strong Duality: 8.1.1 Primal and Dual ProblemsCristian Núñez ClausenNo ratings yet
- 1 When Does A Polyhedron Have Extreme Points?: J ( X) J ( X)Document6 pages1 When Does A Polyhedron Have Extreme Points?: J ( X) J ( X)JerimiahNo ratings yet
- Lecture 5: Primal-Dual Algorithms and Facility Location: 1 Linear Programming DualityDocument10 pagesLecture 5: Primal-Dual Algorithms and Facility Location: 1 Linear Programming DualityrocksouravNo ratings yet
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- Logic Design-Unit-IIDocument56 pagesLogic Design-Unit-IIRajarao MandaNo ratings yet
- Data Structure 4Document7 pagesData Structure 4Jiten ThakurNo ratings yet
- Nrltutorial Part2 Gnns PDFDocument66 pagesNrltutorial Part2 Gnns PDFRafael Lima0% (1)
- AI - Problem Solving by SearchingDocument28 pagesAI - Problem Solving by SearchingAdi AngelNo ratings yet
- How To Solve A Rubiks CubeDocument5 pagesHow To Solve A Rubiks CubeLiezel SanchezNo ratings yet
- 13-CISC - CMPE 365 - Dynamic StacksDocument4 pages13-CISC - CMPE 365 - Dynamic StacksManas SrinivasaiahNo ratings yet
- Math in NetworksDocument22 pagesMath in NetworksHannah RasumanNo ratings yet
- Unit-Ii Regular Expressions and Languages DefinitionDocument34 pagesUnit-Ii Regular Expressions and Languages DefinitionGanesh KumarNo ratings yet
- GP-CP-SQRT DecompositionDocument5 pagesGP-CP-SQRT DecompositionDjNo ratings yet
- Chapter 2-Finite Automata FLATDocument40 pagesChapter 2-Finite Automata FLATmalik macNo ratings yet
- A Survey of Deep Neural Network Architectures and Their Applications PDFDocument16 pagesA Survey of Deep Neural Network Architectures and Their Applications PDFFuwei TIANNo ratings yet
- Java 1Document164 pagesJava 1akbala08No ratings yet
- Handout of The Course - Sszg519Document3 pagesHandout of The Course - Sszg519Aditya KakiNo ratings yet
- EE658A Assignment 6Document14 pagesEE658A Assignment 6sai kNo ratings yet
- 2022 General Math Exam P1 ResponseDocument24 pages2022 General Math Exam P1 ResponsesamNo ratings yet
- Presentation 1Document9 pagesPresentation 1kalashNo ratings yet
- Sample Question Paper Data Structure Using 'C'Document5 pagesSample Question Paper Data Structure Using 'C'Aditya MhaisaleNo ratings yet
- 2019 All PyqDocument16 pages2019 All PyqsameerNo ratings yet
- Lecture On Fuzzy LogicDocument21 pagesLecture On Fuzzy LogicMoshiur Rahman Moshi0% (1)
- Moore's Procedure & Johnson's Procedure: Session 12Document16 pagesMoore's Procedure & Johnson's Procedure: Session 12Easwar KumarNo ratings yet
- Handbook 2019 PrelimsDocument18 pagesHandbook 2019 PrelimsShaymerden KuanganovNo ratings yet
- Chapter4 ND - Edu DthainDocument14 pagesChapter4 ND - Edu DthainVishal SharmaNo ratings yet
- Quantum Teleportation in SecurityDocument5 pagesQuantum Teleportation in SecurityVIVA-TECH IJRINo ratings yet
- Error CorrectionDocument15 pagesError Correctionrishi srivastavaNo ratings yet
- Score Sheet NeutralDocument3 pagesScore Sheet NeutralAubrey AlmedaNo ratings yet
- FFT VHDLDocument28 pagesFFT VHDLRaheetha AhmedNo ratings yet
- Ygrn 09042013Document63 pagesYgrn 09042013Anupam SamantaNo ratings yet
- CS346 Bottom Up ParserDocument64 pagesCS346 Bottom Up ParserAbhijit KaranNo ratings yet
- CS 332: AlgorithmsDocument21 pagesCS 332: AlgorithmsDevin JeffreyNo ratings yet
- Course Objectives: CO1 CO2Document10 pagesCourse Objectives: CO1 CO2Nittin BaruNo ratings yet