You might also like
- Chapt 4Document67 pagesChapt 4Harvish SonarNo ratings yet
- Chapter 3 - MatlabDocument59 pagesChapter 3 - MatlabZe SaNo ratings yet
- Harmonically Excited Vibrations GuideDocument39 pagesHarmonically Excited Vibrations GuideJuan Paulo MayorNo ratings yet
- INTRODUCTION TO DYNAMIC ANALYSIS OF SIMPLE STRUCTURESDocument37 pagesINTRODUCTION TO DYNAMIC ANALYSIS OF SIMPLE STRUCTURESyuchunieNo ratings yet
- Chapter 15: Oscillations: 15-1 Simple Harmonic Motion: Periodic MotionDocument11 pagesChapter 15: Oscillations: 15-1 Simple Harmonic Motion: Periodic MotionAsifur R. HimelNo ratings yet
- F (X) Is C (A, B) Let X, X (A, B) Then F (X) P (X) + R (X) WhereDocument9 pagesF (X) Is C (A, B) Let X, X (A, B) Then F (X) P (X) + R (X) WhereAlbert WillyNo ratings yet
- Vibration Analysis of Forced Harmonic OscillationDocument19 pagesVibration Analysis of Forced Harmonic OscillationRakesh BhaskerNo ratings yet
- CSE40418-Week 2Document33 pagesCSE40418-Week 2smithson JoeNo ratings yet
- P2 FA10 - Derive EOM for periodic forced responseDocument36 pagesP2 FA10 - Derive EOM for periodic forced responseconcord1103No ratings yet
- Fourier Series and TransformDocument46 pagesFourier Series and TransformVaibhav Patil100% (1)
- Wavelet basics explainedDocument26 pagesWavelet basics explainedNitasha SharmaNo ratings yet
- STRC201 Sdof JMWB PDFDocument99 pagesSTRC201 Sdof JMWB PDFAkash ChandraNo ratings yet
- 1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Document99 pages1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Amandeep SinghNo ratings yet
- M.E CAD 2015 ADVANCED VIBRATION ENGINEERINGDocument26 pagesM.E CAD 2015 ADVANCED VIBRATION ENGINEERINGgurusamyNo ratings yet
- Vibration Under General Forcing ConditionsDocument48 pagesVibration Under General Forcing ConditionsEpimerianos AberianosNo ratings yet
- Chapter 9: Frequency-Domain Analysis of Dynamic SystemsDocument11 pagesChapter 9: Frequency-Domain Analysis of Dynamic SystemsinnoodiraNo ratings yet
- Oscillatory Motion Explained: Position, Velocity, Acceleration, Energy and ExamplesDocument41 pagesOscillatory Motion Explained: Position, Velocity, Acceleration, Energy and ExamplesMohamad AsrulNo ratings yet
- Review of Sdof ConceptsDocument7 pagesReview of Sdof ConceptskalpanaadhiNo ratings yet
- Transformada FourierDocument60 pagesTransformada FourierAlisson FigueiredoNo ratings yet
- л р 5Document3 pagesл р 5Mary SwimerNo ratings yet
- Introduction to Single Degree of Freedom SystemsDocument99 pagesIntroduction to Single Degree of Freedom SystemsJura PateregaNo ratings yet
- III. Fourier Series and Fourier TransformDocument20 pagesIII. Fourier Series and Fourier TransformEduard Cosmin UngureanuNo ratings yet
- Notes Dynamics UC3MDocument6 pagesNotes Dynamics UC3MAnonymous oFxrAqvNo ratings yet
- Harmonic Oscillator Up To Forced UndampedDocument86 pagesHarmonic Oscillator Up To Forced UndampedasdasdNo ratings yet
- HARMONIC MOTIONDocument7 pagesHARMONIC MOTIONYemukelaniNo ratings yet
- Free Vibration Natural Frequencies and Mode Shapes PDFDocument15 pagesFree Vibration Natural Frequencies and Mode Shapes PDFkiran2381No ratings yet
- Digital Signal ProcessingDocument40 pagesDigital Signal Processingshankar100% (2)
- FORCED VIBRATION ANALYSISDocument9 pagesFORCED VIBRATION ANALYSISstphn_maturinNo ratings yet
- Vibration in Two Lectures: Free, Forced, Damped and Undamped SystemsDocument12 pagesVibration in Two Lectures: Free, Forced, Damped and Undamped SystemsUjjawal GuptaNo ratings yet
- EECE 301 Note Set 12a Complex SinusoidsDocument8 pagesEECE 301 Note Set 12a Complex SinusoidsrodriguesvascoNo ratings yet
- Harmonically Excited VibrationDocument61 pagesHarmonically Excited VibrationSiddharth MohanNo ratings yet
- Digital Image ProcessingDocument94 pagesDigital Image Processinggirithik14No ratings yet
- 2.2Document18 pages2.22BA19CV059 Rakshita SarangmathNo ratings yet
- Forced Vibrations: K KX CX F XDocument178 pagesForced Vibrations: K KX CX F XGhanshyam Barhate100% (2)
- Signal Processing: Mike Doggett Staffordshire UniversityDocument43 pagesSignal Processing: Mike Doggett Staffordshire UniversityTrolldaddyNo ratings yet
- Forced Vibration of a Single DOF SystemDocument9 pagesForced Vibration of a Single DOF SystemkibzeamNo ratings yet
- Transforms and Partial Differential Equation Questions Notes of m3, 3rd Semester NotesDocument16 pagesTransforms and Partial Differential Equation Questions Notes of m3, 3rd Semester NotesBalaji ShanmugamNo ratings yet
- Mechanical Engineering Mechanical-Vibrations Forced-Vibrations NotesDocument51 pagesMechanical Engineering Mechanical-Vibrations Forced-Vibrations NotesAbhishek MishraNo ratings yet
- Lec 14Document13 pagesLec 14RUCHIRA KUMAR PRADHANNo ratings yet
- DRG Sesi 4 SDoF Forced VibrationDocument10 pagesDRG Sesi 4 SDoF Forced VibrationanggaNo ratings yet
- 3 Forced VibrationsDocument62 pages3 Forced VibrationsAshishAgarwalNo ratings yet
- Transmissibility Analysis of Single DOF SystemDocument5 pagesTransmissibility Analysis of Single DOF SystemPranjalNo ratings yet
- Fourier Transform Definition and Key FunctionsDocument8 pagesFourier Transform Definition and Key Functionsgaurav_juneja_4No ratings yet
- Note 5Document14 pagesNote 5MohamedNo ratings yet
- 1-DOF Forced Vibration Frequency ResponseDocument95 pages1-DOF Forced Vibration Frequency ResponseTaher Abu SeirNo ratings yet
- Serv - Chula.ac - TH Pphongsa Teaching Vibration Ch3Document95 pagesServ - Chula.ac - TH Pphongsa Teaching Vibration Ch3Puneet BahriNo ratings yet
- Chapter 1 & 2 - Introduction To Vibrations and Single DOF SystemsDocument86 pagesChapter 1 & 2 - Introduction To Vibrations and Single DOF SystemsMohamad Faiz TonyNo ratings yet
- Simple Harmonic Motion, SuperpositionDocument9 pagesSimple Harmonic Motion, SuperpositionSaurav KumarNo ratings yet
- Network Theory-Electrical and Electronics Engineering-The Fourier SeriesDocument16 pagesNetwork Theory-Electrical and Electronics Engineering-The Fourier SeriesMompati Letsweletse100% (1)
- Convolution and Fourier Transform ExplainedDocument29 pagesConvolution and Fourier Transform ExplainedFazly MohdNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianFrom EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianRating: 5 out of 5 stars5/5 (1)
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Msbte: Electrical Engineering Under I Scheme Submitted by - Roll NoDocument17 pagesMsbte: Electrical Engineering Under I Scheme Submitted by - Roll Nohrishikesh barveNo ratings yet
- National High School Worksheet Describes Uniformly Accelerated MotionDocument2 pagesNational High School Worksheet Describes Uniformly Accelerated MotionJaybie Tejada100% (1)
- PDF Question Bank in Ac CircuitsDocument75 pagesPDF Question Bank in Ac CircuitsDelos Santos, Jayson C.No ratings yet
- Chap 1 General Principles of StaticsDocument52 pagesChap 1 General Principles of StaticsHassan ArshadNo ratings yet
- Data Sheet For Three-Phase Motors: 1LA8317-4PB90-Z MLFB-Ordering DataDocument1 pageData Sheet For Three-Phase Motors: 1LA8317-4PB90-Z MLFB-Ordering DatasnowwooNo ratings yet
- Selection of Length of AirgapDocument15 pagesSelection of Length of AirgapSANJAYNo ratings yet
- Note - Superconductivity 2023Document4 pagesNote - Superconductivity 2023Mani devassyNo ratings yet
- ResistorsDocument9 pagesResistorsAarnav JainNo ratings yet
- Portable Ash Meter With Calorific ValueDocument2 pagesPortable Ash Meter With Calorific Valueadhe hildaNo ratings yet
- 2.2 Test - Paper 2Document3 pages2.2 Test - Paper 2IB BaddiesNo ratings yet
- Dual Output Ac Current - Voltage TransducerDocument7 pagesDual Output Ac Current - Voltage TransducerMagendran SurulivelNo ratings yet
- Megger DET2Document2 pagesMegger DET2Sudipta ChakrabortyNo ratings yet
- 1 s2.0 S2352152X23016626 MainDocument15 pages1 s2.0 S2352152X23016626 MainDevendra kumar VishwakarmaNo ratings yet
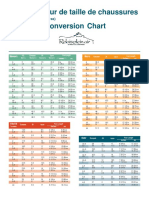
- Convertisseur de tailles de chaussures (en anglais et métriqueDocument1 pageConvertisseur de tailles de chaussures (en anglais et métriqueThhNo ratings yet
- Long Test Work Power EnergyDocument1 pageLong Test Work Power EnergyDarey ApostolNo ratings yet
- Nptel TT 34Document29 pagesNptel TT 34Kamal SahuNo ratings yet
- As 2001.2.8-2001 Methods of Test For Textiles Physical Tests - Determination of Tear Force of Fabrics Using TDocument4 pagesAs 2001.2.8-2001 Methods of Test For Textiles Physical Tests - Determination of Tear Force of Fabrics Using TSAI Global - APACNo ratings yet
- Measurement of Opacity and Particulate Emissions With An On Stack TransmissometerDocument8 pagesMeasurement of Opacity and Particulate Emissions With An On Stack TransmissometerTU NGO THIENNo ratings yet
- Density Heat Capacity and Thermal Conductivity of Liquid Egg ProductsDocument6 pagesDensity Heat Capacity and Thermal Conductivity of Liquid Egg ProductsgombossandorNo ratings yet
- Measuring Tools and Techniques Lab ManualDocument21 pagesMeasuring Tools and Techniques Lab ManualGaurav KumarNo ratings yet
- Dimensional Analysis and SimilitudeDocument47 pagesDimensional Analysis and SimilitudeFabrizio NEBESSENo ratings yet
- Power Plant Engineering: - Portion of The Installed Reserved Kept inDocument8 pagesPower Plant Engineering: - Portion of The Installed Reserved Kept inStephen Lou Borja100% (1)
- 2V Lse Series Vrla Battery: SpecificationsDocument2 pages2V Lse Series Vrla Battery: Specificationschee wyNo ratings yet
- Chapter 3.4 - Measurement of The Stability of Floating BodiesDocument11 pagesChapter 3.4 - Measurement of The Stability of Floating BodiesErnesto LimNo ratings yet
- Pcr-Le Le2Document36 pagesPcr-Le Le2Brent TairaNo ratings yet
- Using The LC Lumped Element Model For Transmission Line ExperimentsDocument5 pagesUsing The LC Lumped Element Model For Transmission Line Experimentssana kanaNo ratings yet
- Daily Lesson Log: Teaching Dates and TimeDocument12 pagesDaily Lesson Log: Teaching Dates and Timemarvin siegaNo ratings yet
- GravitationDocument21 pagesGravitationNuan Ting NgNo ratings yet
- Momentum Questions Topicals Unit 4 Edexcel IalDocument20 pagesMomentum Questions Topicals Unit 4 Edexcel IalAliza ImtiazNo ratings yet
- Science 7 - Module 1 - Version 3Document16 pagesScience 7 - Module 1 - Version 3Abegail PanangNo ratings yet























































![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-1-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1699542561?v=1)