You might also like
- Computer Aided Process Planning (CAPP): 2nd EditionFrom EverandComputer Aided Process Planning (CAPP): 2nd EditionNo ratings yet
- Systems for Planning and Control in ManufacturingFrom EverandSystems for Planning and Control in ManufacturingRating: 3 out of 5 stars3/5 (1)
- Group Assignment Control Engineering (Gp10)Document28 pagesGroup Assignment Control Engineering (Gp10)putri farrahNo ratings yet
- Total Preventative ManagementDocument44 pagesTotal Preventative Managementazzubayr89No ratings yet
- Isoprene by Isopentane Dehydrogenation: Ihs ChemicalDocument5 pagesIsoprene by Isopentane Dehydrogenation: Ihs ChemicalMary Grace VelitarioNo ratings yet
- PRG PR MAC 0002 R00 e CompressorsDocument42 pagesPRG PR MAC 0002 R00 e CompressorsAleem QureshiNo ratings yet
- IMee Report (1) - MergedDocument62 pagesIMee Report (1) - MergedRaiden mathewNo ratings yet
- Statistical Sales Conditions (34B - MX) : Test Script SAP S/4HANA - 30-08-19Document19 pagesStatistical Sales Conditions (34B - MX) : Test Script SAP S/4HANA - 30-08-19Jhonny AlvaradoNo ratings yet
- Actualizada 28.04.20Document38 pagesActualizada 28.04.20Katherine ZMNo ratings yet
- First Semester: (Accounting Research Proposal)Document2 pagesFirst Semester: (Accounting Research Proposal)Vanessa FajardoNo ratings yet
- Geotechnical Structures: ENGM271Document17 pagesGeotechnical Structures: ENGM271Rafael ScudelariNo ratings yet
- Ebook PDF Systems Analysis and Design 12th EditionDocument61 pagesEbook PDF Systems Analysis and Design 12th Editionethel.webley103100% (53)
- Sector Screenveurope1009Document1 pageSector Screenveurope1009buyanalystlondonNo ratings yet
- Snippert Ma BMSDocument46 pagesSnippert Ma BMSrishabh singhNo ratings yet
- 2.9 Borescope InspectionDocument6 pages2.9 Borescope InspectionBILAL FAROOQUINo ratings yet
- Period-End Closing - Maintenance Orders (BF7 - SA) : Test Script SAP S/4HANA - 30-08-19Document11 pagesPeriod-End Closing - Maintenance Orders (BF7 - SA) : Test Script SAP S/4HANA - 30-08-19gobashaNo ratings yet
- A ProcessDocument41 pagesA ProcessjulioNo ratings yet
- TMP 07Document6 pagesTMP 07Lê HoànNo ratings yet
- Iphone Se 820-00282 SchematicDocument60 pagesIphone Se 820-00282 SchematicHec MercadoNo ratings yet
- Draf 2 Procedure & Work ProcessDocument8 pagesDraf 2 Procedure & Work ProcessFgj JhgNo ratings yet
- 1ST Prelim Tos G11 TNCTDocument2 pages1ST Prelim Tos G11 TNCTApian FloresNo ratings yet
- Tunneling ProductivityDocument56 pagesTunneling ProductivitySiddharth Patel100% (1)
- Mini Project Pid Design and TuningDocument5 pagesMini Project Pid Design and TuningfaranimohamedNo ratings yet
- 33Q S4hana1909 BPD en UsDocument16 pages33Q S4hana1909 BPD en Usashu guptaNo ratings yet
- Ecetoc WR 28Document98 pagesEcetoc WR 28AbaNo ratings yet
- Introduction To Management Science: Modelling, Optimisation and ProbabilityDocument6 pagesIntroduction To Management Science: Modelling, Optimisation and ProbabilityErine ContranoNo ratings yet
- Apqp Activities MatrixDocument7 pagesApqp Activities MatrixPk Nimiwal100% (1)
- G4-VM Workshop Final Report PDFDocument95 pagesG4-VM Workshop Final Report PDFMaliki Mustafa100% (1)
- ST&SADocument104 pagesST&SAwillaimNo ratings yet
- 000-ZA-E-09413 Construction Progress Meas ProcDocument12 pages000-ZA-E-09413 Construction Progress Meas Procalinor_tnNo ratings yet
- Be (Computer Science and Business System) - 2019 Scheme: 6 Elective Ii 3 0 2 4.0 7 Elective I + Lab 2 1 2 3.5Document2 pagesBe (Computer Science and Business System) - 2019 Scheme: 6 Elective Ii 3 0 2 4.0 7 Elective I + Lab 2 1 2 3.5PIYUSH BAWANo ratings yet
- CRITERIO DISEÑO PLANT Rev1 (Recuperado)Document80 pagesCRITERIO DISEÑO PLANT Rev1 (Recuperado)Tomas Ttica GasparNo ratings yet
- Professor: Mohamed Khan: Group Members: COMP 246 Team 4Document48 pagesProfessor: Mohamed Khan: Group Members: COMP 246 Team 4Manpreet KaurNo ratings yet
- Dise Via 1Document1 pageDise Via 1Burke KartNo ratings yet
- 1b - Publicly-availablity-SMETA-Measurement-Criteria-4-Pillar-5 0 PDFDocument63 pages1b - Publicly-availablity-SMETA-Measurement-Criteria-4-Pillar-5 0 PDFLên Văn LêNo ratings yet
- 2.3 ReservedDocument2 pages2.3 ReservedBILAL FAROOQUINo ratings yet
- Dissection AIRCAT2217 Lyst8329Document1 pageDissection AIRCAT2217 Lyst8329HARSHIT BHATIANo ratings yet
- Iphone SE N69 051-00648 4.0.0Document60 pagesIphone SE N69 051-00648 4.0.0fede.almadaNo ratings yet
- Technical Sciences GR 12 Exam Guidelines 2021 EngDocument39 pagesTechnical Sciences GR 12 Exam Guidelines 2021 Engzulusamkelo507No ratings yet
- Saudi Arabian Oil Company: SECTION 15050 Basic Mechanical Material and MethodsDocument9 pagesSaudi Arabian Oil Company: SECTION 15050 Basic Mechanical Material and Methodsthahar ali syedNo ratings yet
- BST7A - Test 2 BMFG4043 - Feb 2021Document12 pagesBST7A - Test 2 BMFG4043 - Feb 2021luqman malayNo ratings yet
- ExP Class NotesDocument38 pagesExP Class NotesEltonNo ratings yet
- 1075 Tech 6815 Steam Probe 0Document5 pages1075 Tech 6815 Steam Probe 0sanjoy pandaNo ratings yet
- Patan Multiple Campus: Tribhuvan UniversityDocument61 pagesPatan Multiple Campus: Tribhuvan UniversitysumanNo ratings yet
- 《DPDK Testpmd 应用》Document40 pages《DPDK Testpmd 应用》James HuangNo ratings yet
- Plant: Tan Thang Cement Plant: Status: Issued ForDocument26 pagesPlant: Tan Thang Cement Plant: Status: Issued ForgacongnghiepNo ratings yet
- Team2B GBE KPO 4 001 00 Kaizen Template (Operations) Rev 05Document54 pagesTeam2B GBE KPO 4 001 00 Kaizen Template (Operations) Rev 05Peggy LeeNo ratings yet
- Technical Specification: 0 OriginalDocument22 pagesTechnical Specification: 0 OriginalGuilherme de BarrosNo ratings yet
- Jadual Spesifikasi Pentaksiran Berterusan: Level PLODocument1 pageJadual Spesifikasi Pentaksiran Berterusan: Level PLOPAUL KENNY TSHONGNo ratings yet
- MODULE 2 - ERP Application Setup and Operation Chapter 1 - Install ApplicationDocument205 pagesMODULE 2 - ERP Application Setup and Operation Chapter 1 - Install ApplicationHasto WidodoNo ratings yet
- Part 1, Morning: 2 Hours, MCQ, Closed BookDocument2 pagesPart 1, Morning: 2 Hours, MCQ, Closed BookBeluwa EcNo ratings yet
- Online Admission System Project ReportDocument40 pagesOnline Admission System Project ReportMd RehanNo ratings yet
- Dmaic Standard Work Template: ControlDocument17 pagesDmaic Standard Work Template: ControlGeminiNo ratings yet
- BOC-STR-001 Eng (1)Document61 pagesBOC-STR-001 Eng (1)Joseph CervantesNo ratings yet
- The Tolerance Unless Classified 0.3mm: Outline Dimension & Block DiagramDocument1 pageThe Tolerance Unless Classified 0.3mm: Outline Dimension & Block Diagramfirman syahNo ratings yet
- QSCT Sagar 1Document64 pagesQSCT Sagar 1shreyas karpeNo ratings yet
- Actual Costing (33Q - FR) : Test Script SAP S/4HANA Cloud - 12-10-21Document25 pagesActual Costing (33Q - FR) : Test Script SAP S/4HANA Cloud - 12-10-21dheerajNo ratings yet
- 2.8 NDT Bsi ShopDocument5 pages2.8 NDT Bsi ShopBILAL FAROOQUINo ratings yet
- ASIC and FPGA Verification: A Guide to Component ModelingFrom EverandASIC and FPGA Verification: A Guide to Component ModelingRating: 5 out of 5 stars5/5 (1)
- Report Solid IIDocument13 pagesReport Solid IIAfnan MazNo ratings yet
- 6E - Group Assignment Fluid Mechanics IIDocument22 pages6E - Group Assignment Fluid Mechanics IIAfnan MazNo ratings yet
- Group 5 Assignment 2Document13 pagesGroup 5 Assignment 2Afnan MazNo ratings yet
- Muhammad Afnan - CD200117 - Energy ConservationDocument7 pagesMuhammad Afnan - CD200117 - Energy ConservationAfnan MazNo ratings yet
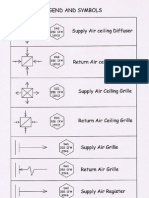
- Lengends and SymbolsDocument5 pagesLengends and Symbolsnareshbv749No ratings yet
- Control System I Practical Iv Semester, B.Tech Ee Course Code: Eec273Document5 pagesControl System I Practical Iv Semester, B.Tech Ee Course Code: Eec273JomeNo ratings yet
- Home Downloads Live PLC Questions and Answers PLC Ebooks Contact Us Privacy Policy Advertise HereDocument2 pagesHome Downloads Live PLC Questions and Answers PLC Ebooks Contact Us Privacy Policy Advertise Hereskaderbe1100% (1)
- Airbus A320 Flight Controls LawsDocument74 pagesAirbus A320 Flight Controls Lawspontoo97% (78)
- E-Learning Schedule 2015 - V13Document2 pagesE-Learning Schedule 2015 - V13Bhekusizi DlodloNo ratings yet
- 1.1.3.10 Lab - Compare Closed-Loop and Open-Loop Control SystemsDocument2 pages1.1.3.10 Lab - Compare Closed-Loop and Open-Loop Control SystemsHalima AqraaNo ratings yet
- CSDDocument4 pagesCSDharryNo ratings yet
- 3.1 Aim: Use PLC To Test The START STOP and TEST Logic For Two Inputs and One Output. 3.2 Apparatus: PLC Software, NO and NC Switches. 3.3theoryDocument3 pages3.1 Aim: Use PLC To Test The START STOP and TEST Logic For Two Inputs and One Output. 3.2 Apparatus: PLC Software, NO and NC Switches. 3.3theoryrashmi patilNo ratings yet
- Control EngineeringDocument21 pagesControl EngineeringNor AshimyNo ratings yet
- PLC Objective Questions Answers - PLC SCADA ACADEMYDocument5 pagesPLC Objective Questions Answers - PLC SCADA ACADEMYRinalyn-Oscar Gamboa MagtibayNo ratings yet
- Licensed Contractors by Business Name July22Document208 pagesLicensed Contractors by Business Name July22brijeshNo ratings yet
- Control Systems Notes DEE M2 JuneDocument34 pagesControl Systems Notes DEE M2 JuneThairu MuiruriNo ratings yet
- 4 Control System ComponentsDocument43 pages4 Control System ComponentsJEYAVEL PALANISAMYNo ratings yet
- Air Handling Unit Preventive Maintenance Checklist PDFDocument2 pagesAir Handling Unit Preventive Maintenance Checklist PDFAditya SuardiNo ratings yet
- Control System Viva QuestionDocument13 pagesControl System Viva QuestionMasudur RahmanNo ratings yet
- INST-U01 Trainers Resource MaterialDocument16 pagesINST-U01 Trainers Resource MaterialkhalafNo ratings yet
- PDC TopicsDocument2 pagesPDC TopicsJulius BersabeNo ratings yet
- The Inverted Pendulum Benchmark in Nonlinear Control Theory A SurveyDocument9 pagesThe Inverted Pendulum Benchmark in Nonlinear Control Theory A SurveyEsmfNo ratings yet
- 16 Karlekar Purva DTSP Assi 3Document14 pages16 Karlekar Purva DTSP Assi 3Purva100% (1)
- Butterworth FiltersDocument22 pagesButterworth FiltersShreya MattikalliNo ratings yet
- DELTA Industrial Automation Products Overview - EN - 20160503Document96 pagesDELTA Industrial Automation Products Overview - EN - 20160503madruga.bernalNo ratings yet
- Nikhil K VDocument4 pagesNikhil K VVinitha VenuNo ratings yet
- Proline 2 Flight-Line Maintenance Troubleshooting Flow ChartsDocument14 pagesProline 2 Flight-Line Maintenance Troubleshooting Flow ChartsJuan Rodriguez100% (1)
- Lab Che 239 Liquid Flow G5Document9 pagesLab Che 239 Liquid Flow G5Muhd FirdausNo ratings yet
- Control EngineeringDocument28 pagesControl EngineeringSHANZYYNo ratings yet
- PLC Ladder Logic Example of AlarmsDocument8 pagesPLC Ladder Logic Example of AlarmsInstrumentation ToolsNo ratings yet
- B2 - Nano Air Temperature Control SystemDocument19 pagesB2 - Nano Air Temperature Control Systemmoon star angelNo ratings yet
- Shim2021 Disturbance ObserverDocument15 pagesShim2021 Disturbance ObserverEdmund Luke Benedict SimpsonNo ratings yet
- Building Automation 2011Document13 pagesBuilding Automation 2011samantha1966100% (2)