You might also like
- REN an-CM-314 AC-AC Automatic Voltage Regulator APN 20210928 1Document15 pagesREN an-CM-314 AC-AC Automatic Voltage Regulator APN 20210928 1vidalvis avila castillaNo ratings yet
- Run-Time Calibration of The Internal RC OscillatorDocument19 pagesRun-Time Calibration of The Internal RC Oscillatormike_helplineNo ratings yet
- SIFANG - CSC-121A - V1.00 - Numerical Auto Recloser and Circuit Breaker Auxiliary Protection Equipment Manual - 2009-10Document54 pagesSIFANG - CSC-121A - V1.00 - Numerical Auto Recloser and Circuit Breaker Auxiliary Protection Equipment Manual - 2009-10MarkusKunNo ratings yet
- Nota de Aplicacion - PicoPower BasicsDocument7 pagesNota de Aplicacion - PicoPower Basicsgusti072No ratings yet
- Trane RT-SVP06A-EN 05062008Document125 pagesTrane RT-SVP06A-EN 05062008Elias Garcia JerezNo ratings yet
- B-65270EN Motori - 08 PDFDocument644 pagesB-65270EN Motori - 08 PDFvasiliy vasilievichNo ratings yet
- برمجة مصاعد فوجي اليابانDocument239 pagesبرمجة مصاعد فوجي اليابانباسم عوض الصلويNo ratings yet
- Openloop Motor ModelingDocument16 pagesOpenloop Motor ModelingUmair RazaNo ratings yet
- Embedded FirmwareDocument7 pagesEmbedded FirmwareSatya SinhaNo ratings yet
- Manual Ccr961 Sw4.0 v. b2Document53 pagesManual Ccr961 Sw4.0 v. b2César GuevaraNo ratings yet
- AN5300 - Using and Synchronizing The KEA's Internal Clock For LIN Follower Implementations - Application NoteDocument13 pagesAN5300 - Using and Synchronizing The KEA's Internal Clock For LIN Follower Implementations - Application NoteArun KumarNo ratings yet
- 39 210940 01GB 05 - FunctionalDescription - CDocument18 pages39 210940 01GB 05 - FunctionalDescription - CJose InsaurraldeNo ratings yet
- Sitehawk Sk-4000 Analyzer: Cable and Antenna Tester SystemsDocument67 pagesSitehawk Sk-4000 Analyzer: Cable and Antenna Tester SystemsNaxo LizarazoNo ratings yet
- Item 6. Manual-CCR961-SW4.0-V.-CDocument54 pagesItem 6. Manual-CCR961-SW4.0-V.-CPROYECTOS REXNo ratings yet
- LM 2586Document43 pagesLM 2586Cristobal MartinezNo ratings yet
- Advanced Test Equipment Rentals: Established 1981Document673 pagesAdvanced Test Equipment Rentals: Established 1981contateste123No ratings yet
- ATAVRISPUserGuide PDFDocument35 pagesATAVRISPUserGuide PDFmughees_itcompNo ratings yet
- Service Manual Pulse Oximeter Model 515Document138 pagesService Manual Pulse Oximeter Model 515Mojtaba TorkiNo ratings yet
- AC Servo BL Super PQ Serie Type M Instruction ManualDocument350 pagesAC Servo BL Super PQ Serie Type M Instruction Manualsunhuynh100% (1)
- P30O Service ManualDocument163 pagesP30O Service Manualarif cahyoNo ratings yet
- FILE - 20200415 - 220353 - NcEditor V12 Laser Cutting CNC System Manufacturer Manual-R1Document147 pagesFILE - 20200415 - 220353 - NcEditor V12 Laser Cutting CNC System Manufacturer Manual-R1Hoàng DêNo ratings yet
- LM 2588Document40 pagesLM 25888403c36589584aNo ratings yet
- Areva p642 Xrio Converter Manual Enu Tu2.30 v1.000Document7 pagesAreva p642 Xrio Converter Manual Enu Tu2.30 v1.000Mohd AlghunimatNo ratings yet
- SIFANG - CSC-121A - V1.00 - Numerical Auto Reclosing and Circuit Breaker Auxiliary Protection Equipment Manual - 2012-03Document52 pagesSIFANG - CSC-121A - V1.00 - Numerical Auto Reclosing and Circuit Breaker Auxiliary Protection Equipment Manual - 2012-03MarkusKunNo ratings yet
- HP Technical Manual PDFDocument90 pagesHP Technical Manual PDFAlejandro SalmeronNo ratings yet
- YS-K01 Door Drive ManualDocument46 pagesYS-K01 Door Drive ManualMuhammad Rashid100% (6)
- 555 GreenpackDocument17 pages555 GreenpackRuboto BotoNo ratings yet
- Rev0 (System Integration Guide)Document52 pagesRev0 (System Integration Guide)Eth3r lok1No ratings yet
- Allengers 325 RF - Installation and Service ManualDocument63 pagesAllengers 325 RF - Installation and Service Manualleopa7880% (20)
- As SeriesDocument52 pagesAs SeriesZulfikar FahmiNo ratings yet
- IRMCF343: Sensorless Motor Control IC For AppliancesDocument34 pagesIRMCF343: Sensorless Motor Control IC For AppliancesMario SitorusNo ratings yet
- Casio QT2100 Reference User ManualDocument258 pagesCasio QT2100 Reference User ManualJosue QuirozNo ratings yet
- BQ 32000Document33 pagesBQ 32000Anand PaulNo ratings yet
- bq32000 Real-Time Clock (RTC) : 1 Features 3 DescriptionDocument32 pagesbq32000 Real-Time Clock (RTC) : 1 Features 3 DescriptionelmiNo ratings yet
- Type PST Specification Guide: SoftstartersDocument12 pagesType PST Specification Guide: SoftstartersgarysNo ratings yet
- Layland Bs4 CodeDocument75 pagesLayland Bs4 Codeirfan sutharNo ratings yet
- 8 - P01 - 023 - EN - 04-04 - MX Eco FunctionDocument284 pages8 - P01 - 023 - EN - 04-04 - MX Eco Functionm bathNo ratings yet
- HP Agilent 8590 Series Service ManualDocument674 pagesHP Agilent 8590 Series Service Manualnsc201100% (2)
- AVR135: Using Timer Capture To Measure PWM Duty CycleDocument20 pagesAVR135: Using Timer Capture To Measure PWM Duty CycleAli BarakatNo ratings yet
- STK500 User GuideDocument55 pagesSTK500 User GuideEdin CerjakovicNo ratings yet
- Site Master™: Handheld Cable & Antenna Analyzer Featuring Classic and Advanced ModesDocument14 pagesSite Master™: Handheld Cable & Antenna Analyzer Featuring Classic and Advanced ModesJuan Manuel RojasNo ratings yet
- Parameter Manual. Сервопривод (B-65270en)Document702 pagesParameter Manual. Сервопривод (B-65270en)Богинский Сергей100% (1)
- Apresentacao PCC1301 DisplayDocument32 pagesApresentacao PCC1301 DisplayJaffer HussainNo ratings yet
- Vibscanner FFT GDocument80 pagesVibscanner FFT GCristhian Garcia Villarroel100% (1)
- Laser Plus InstallDocument27 pagesLaser Plus InstallAjmul Khan KhanNo ratings yet
- BRD - Klee-Active Brief ManualDocument40 pagesBRD - Klee-Active Brief ManualKaushal BhadoriyaNo ratings yet
- ATstk500 UgDocument56 pagesATstk500 UgAlberto LimónNo ratings yet
- Scanreco RC 400-8Document40 pagesScanreco RC 400-8Franchesca Romane Navarro Zamora90% (10)
- DRV10866 5-V, 3-Phase, Sensorless BLDC Motor Driver: 1 Features 3 DescriptionDocument23 pagesDRV10866 5-V, 3-Phase, Sensorless BLDC Motor Driver: 1 Features 3 DescriptionSitt Nyein SoeNo ratings yet
- Unit3 EsdDocument25 pagesUnit3 EsdY19EC2648 JayasreeNo ratings yet
- 6626 DescribtionDocument20 pages6626 DescribtionAlrik EYINo ratings yet
- Bio-Rad Icycler Iq - Instruction ManualDocument146 pagesBio-Rad Icycler Iq - Instruction ManualEnrique DuarteNo ratings yet
- Minor Project ReportDocument29 pagesMinor Project ReportHiteshNo ratings yet
- AXOR Manuals 3565Document72 pagesAXOR Manuals 3565Florian CiprianNo ratings yet
- Sluaa32a - Calibration and OTP GuideDocument16 pagesSluaa32a - Calibration and OTP GuideAbhilashBetanamudiNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Practical Data Acquisition for Instrumentation and Control SystemsFrom EverandPractical Data Acquisition for Instrumentation and Control SystemsNo ratings yet
- Catalan NumbersDocument17 pagesCatalan NumbersVishal GuptaNo ratings yet
- University of Delhi Third Admission List - Bachelor of Education (B.Ed.)-2021Document8 pagesUniversity of Delhi Third Admission List - Bachelor of Education (B.Ed.)-2021FERA Future electronics and research administrationNo ratings yet
- Engine Cpta Czca Czea Ea211 EngDocument360 pagesEngine Cpta Czca Czea Ea211 EngleuchiNo ratings yet
- RPH Sains DLP Y3 2018Document29 pagesRPH Sains DLP Y3 2018Sukhveer Kaur0% (1)
- PTE - Template - Essay All TypesDocument8 pagesPTE - Template - Essay All TypeskajalNo ratings yet
- Our Products: Powercore Grain Oriented Electrical SteelDocument20 pagesOur Products: Powercore Grain Oriented Electrical SteelkoalaboiNo ratings yet
- Rizal's Works Inspire Filipino PrideDocument2 pagesRizal's Works Inspire Filipino PrideItzLian SanchezNo ratings yet
- 8D Form - LongDocument6 pages8D Form - LongmaofireNo ratings yet
- Teaching Speaking: Daily Activities Lesson PlanDocument3 pagesTeaching Speaking: Daily Activities Lesson PlanMARCELANo ratings yet
- Guardian Brand Book - 042019Document15 pagesGuardian Brand Book - 042019FTU.CS2 Nguyễn Việt HưngNo ratings yet
- Net CallDocument2 pagesNet CallFerdinand Monte Jr.100% (2)
- Conducting Properties of MaterialsDocument28 pagesConducting Properties of MaterialsMarzook JrNo ratings yet
- Oracle Property Manager System OptionsDocument6 pagesOracle Property Manager System OptionsAhmadShuaibiNo ratings yet
- Galvanic CorrosionDocument5 pagesGalvanic Corrosionsatheez3251No ratings yet
- Glover 5e SI - Chapter 05Document30 pagesGlover 5e SI - Chapter 05novakiNo ratings yet
- The PersonalityDocument7 pagesThe PersonalityMeris dawatiNo ratings yet
- Gathering Statistical DataDocument8 pagesGathering Statistical DataianNo ratings yet
- Registration Confirmation: 315VC18331 Aug 24 2009 7:47PM Devashish Chourasiya 24/05/1989 Mechanical RanchiDocument2 pagesRegistration Confirmation: 315VC18331 Aug 24 2009 7:47PM Devashish Chourasiya 24/05/1989 Mechanical Ranchicalculatorfc101No ratings yet
- 722.6 Transmission Conductor Plate Replacement DIYDocument3 pages722.6 Transmission Conductor Plate Replacement DIYcamaro67427100% (1)
- Radproduction Chapter 2-9Document276 pagesRadproduction Chapter 2-9Christian DioNo ratings yet
- Nasya - Paralellism - New Dengan Tambahan Dari LongmanDocument28 pagesNasya - Paralellism - New Dengan Tambahan Dari LongmannasyaayuNo ratings yet
- Cause and Effect Diagram for Iron in ProductDocument2 pagesCause and Effect Diagram for Iron in ProductHungNo ratings yet
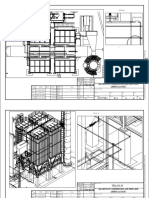
- Baghouse Compressed AirDocument17 pagesBaghouse Compressed Airmanh hung leNo ratings yet
- Methodology of Legal Research: Challenges and OpportunitiesDocument8 pagesMethodology of Legal Research: Challenges and OpportunitiesBhan WatiNo ratings yet
- Quick Start Guide - QualiPoc AndroidDocument24 pagesQuick Start Guide - QualiPoc AndroidDmitekNo ratings yet
- Time: 3 Hours Total Marks: 100: Printed Page 1 of 2 Sub Code: KEE302Document2 pagesTime: 3 Hours Total Marks: 100: Printed Page 1 of 2 Sub Code: KEE302AvinäshShärmaNo ratings yet
- AN2061 Application Note: EEPROM Emulation With ST10F2xxDocument15 pagesAN2061 Application Note: EEPROM Emulation With ST10F2xxleuchimed mouhNo ratings yet
- Yoki 644 LPV BS - 7250215 - SDS - EU - 7923568Document14 pagesYoki 644 LPV BS - 7250215 - SDS - EU - 7923568MohamedAhmedShawkyNo ratings yet
- Physice 2013 Unsolved Paper Outside Delhi PDFDocument7 pagesPhysice 2013 Unsolved Paper Outside Delhi PDFAbhilashaNo ratings yet
- Ice Problem Sheet 1Document2 pagesIce Problem Sheet 1Muhammad Hamza AsgharNo ratings yet