You might also like
- Vdocuments - MX - Optical Design With Zemax For PHD Basics Uni Jenade DesignwithzemopticalDocument61 pagesVdocuments - MX - Optical Design With Zemax For PHD Basics Uni Jenade DesignwithzemopticalLucia SuarezNo ratings yet
- A 0 e 2 DB 1 DD 51 FCB 57 Aac 3Document7 pagesA 0 e 2 DB 1 DD 51 FCB 57 Aac 3api-300905531No ratings yet
- Determining Specular Radiant Flux DistributionsDocument34 pagesDetermining Specular Radiant Flux DistributionsdomingocattoniNo ratings yet
- DCS17 Design+and+Correction+Lecture+0+IntroductionDocument4 pagesDCS17 Design+and+Correction+Lecture+0+IntroductionLucia SuarezNo ratings yet
- Vdocuments - MX - Optical Design With Zemax Uni Jenade Designwithzemoptical Design With ZemaxDocument39 pagesVdocuments - MX - Optical Design With Zemax Uni Jenade Designwithzemoptical Design With ZemaxLucia SuarezNo ratings yet
- Numerical Analysis of Tight Focusing and Scattering of Singular BeamsDocument4 pagesNumerical Analysis of Tight Focusing and Scattering of Singular Beamssarath chandranNo ratings yet
- Barett PDFDocument20 pagesBarett PDFlnadolskiNo ratings yet
- MIR2012 Lec5Document16 pagesMIR2012 Lec5yeesuenNo ratings yet
- 2023-Deep Learning Based Scatter EstimationDocument9 pages2023-Deep Learning Based Scatter EstimationjayNo ratings yet
- Design and Correction of Optical Systems: Lecture 1: Basics 2017-04-07 Herbert GrossDocument46 pagesDesign and Correction of Optical Systems: Lecture 1: Basics 2017-04-07 Herbert GrossKenS.MaoNo ratings yet
- 2009 - SCI - Correction of Field Distortion of Laser Marking Systems Using Surface Compensation FunctionDocument6 pages2009 - SCI - Correction of Field Distortion of Laser Marking Systems Using Surface Compensation FunctionozguraliNo ratings yet
- LA3NET Workshop ILT Aachen 2013 LoosenOptics Design1Document33 pagesLA3NET Workshop ILT Aachen 2013 LoosenOptics Design1LoubNa StarkNo ratings yet
- Syllabus For Optical Engg.Document16 pagesSyllabus For Optical Engg.ersumitkmrNo ratings yet
- Dual-Tree Complex Wavelet Transform Based SAR Despeckling Using Interscale DependenceDocument9 pagesDual-Tree Complex Wavelet Transform Based SAR Despeckling Using Interscale DependenceNavdeep GoelNo ratings yet
- Journal of Synchrotron Radiation - 2020 - Berujon - X Ray Optics and Beam Characterization Using Random ModulationDocument12 pagesJournal of Synchrotron Radiation - 2020 - Berujon - X Ray Optics and Beam Characterization Using Random ModulationLeafar OllebarNo ratings yet
- Computer-Aided Shape Analysis and Classification of Weld Defects in Industrial Radiography Based Invariant Attributes and Neural NetworksDocument6 pagesComputer-Aided Shape Analysis and Classification of Weld Defects in Industrial Radiography Based Invariant Attributes and Neural NetworksWaqas MuneerNo ratings yet
- Metasurfaces for Full-Color Computational ImagingDocument43 pagesMetasurfaces for Full-Color Computational ImagingGetLyricsNo ratings yet
- 1 s2.0 S0963869522000998 MainDocument13 pages1 s2.0 S0963869522000998 MaintjuliuyjNo ratings yet
- Dokumen - Tips - Optical Design With Zemax For PHD Advanced Optical Design With Zemax For PHDDocument89 pagesDokumen - Tips - Optical Design With Zemax For PHD Advanced Optical Design With Zemax For PHDrewon81607No ratings yet
- Ge 2021 J. Phys. Conf. Ser. 1961 012017Document7 pagesGe 2021 J. Phys. Conf. Ser. 1961 012017Rupesh KumarNo ratings yet
- OCD MetrologyDocument9 pagesOCD MetrologyGAURAV PANDEYNo ratings yet
- ADOP: Approximate Differentiable One-Pixel Point RenderingDocument14 pagesADOP: Approximate Differentiable One-Pixel Point RenderingCamila FrichsmanNo ratings yet
- Investigating Deep Optics Model RepresentationDocument12 pagesInvestigating Deep Optics Model RepresentationJ SpencerNo ratings yet
- Centre Spatial de Liège Institut Montefiore UniversitéDocument32 pagesCentre Spatial de Liège Institut Montefiore Universitéhazzang21No ratings yet
- Optical Design with Zemax for PhD - Basics: Aberrations IIDocument34 pagesOptical Design with Zemax for PhD - Basics: Aberrations IIKishore KumarNo ratings yet
- Presentation 0310192016Document103 pagesPresentation 0310192016itsme.chandlermbingNo ratings yet
- Journal of Synchrotron Radiation - 2020 - Berujon - X Ray Optics and Beam Characterization Using Random Modulation TheoryDocument9 pagesJournal of Synchrotron Radiation - 2020 - Berujon - X Ray Optics and Beam Characterization Using Random Modulation TheoryLeafar OllebarNo ratings yet
- Face Recognition: Shivankush Aras Arunkumar Subramanian Zhi ZhangDocument42 pagesFace Recognition: Shivankush Aras Arunkumar Subramanian Zhi ZhangNehru VeerabatheranNo ratings yet
- Classification of Welding Defects in Radiographic Images Using An Adaptive-Network-Based Fuzzy System PDFDocument10 pagesClassification of Welding Defects in Radiographic Images Using An Adaptive-Network-Based Fuzzy System PDFaliNo ratings yet
- Paraxial Eoe 03Document12 pagesParaxial Eoe 03Arkapravo ChaudhuryNo ratings yet
- Analysis and Classification of SAR Textures Using Information TheoryDocument13 pagesAnalysis and Classification of SAR Textures Using Information TheoryRodrigo VasconcelosNo ratings yet
- Moreno 2010 FRFTDocument58 pagesMoreno 2010 FRFTsujit kumar dasNo ratings yet
- Automatic Edgedetection SARimagesDocument14 pagesAutomatic Edgedetection SARimagesManasi NaikNo ratings yet
- CODEV Ch5Document42 pagesCODEV Ch5Sadegh SobhiNo ratings yet
- R.A. Kozhemiakin, S.S. Krivenko, V.V. Lukin, R.C.P. Marques, F.N.S. de Medeiros, B. VozelDocument10 pagesR.A. Kozhemiakin, S.S. Krivenko, V.V. Lukin, R.C.P. Marques, F.N.S. de Medeiros, B. VozelnicolasNo ratings yet
- Vdocuments - MX Optical Design With Zemax For PHD Basics Iapuni Jenade DesignforphdDocument45 pagesVdocuments - MX Optical Design With Zemax For PHD Basics Iapuni Jenade DesignforphdLucia SuarezNo ratings yet
- 05a) Pupils and Stops - 1 - 25Document9 pages05a) Pupils and Stops - 1 - 25Rosa VelázquezNo ratings yet
- Fea Unit 4 pg1-26Document25 pagesFea Unit 4 pg1-26SAURAV KOULNo ratings yet
- Journal of Synchrotron Radiation - 2019 - Sanchez Del Rio - A Hierarchical Approach For Modeling X Ray BeamlinesDocument15 pagesJournal of Synchrotron Radiation - 2019 - Sanchez Del Rio - A Hierarchical Approach For Modeling X Ray BeamlinesLeafar OllebarNo ratings yet
- Bayesian Denoising of SAR Image: Y. Murali Mohan Babu, Dr. M.V. Subramanyam, Dr. M.N. Giri PrasadDocument3 pagesBayesian Denoising of SAR Image: Y. Murali Mohan Babu, Dr. M.V. Subramanyam, Dr. M.N. Giri PrasadsakethmohanNo ratings yet
- Paper 3Document11 pagesPaper 3irjmssNo ratings yet
- AFM at Video Rate and BeyondDocument66 pagesAFM at Video Rate and BeyondLIAKMANNo ratings yet
- Signal Processing For Missile Guidance: Prospects For The FutureDocument7 pagesSignal Processing For Missile Guidance: Prospects For The FutureSuroj SahaNo ratings yet
- Аnalysis of corneal aberration of the human eye: Keywords: CitationDocument8 pagesАnalysis of corneal aberration of the human eye: Keywords: CitationYunisNo ratings yet
- Course Code Credit Hours Courses DescriptionDocument2 pagesCourse Code Credit Hours Courses DescriptionTalha YousufNo ratings yet
- Zemax in GeneralDocument31 pagesZemax in GeneralgordansimNo ratings yet
- Preprocessing Steps for fMRI Data AnalysisDocument53 pagesPreprocessing Steps for fMRI Data AnalysisJosueNo ratings yet
- DANTEC Laser Shearography IntroductionDocument61 pagesDANTEC Laser Shearography IntroductionjeyasekarNo ratings yet
- Comparative - Study - of - Edge - Detection - Algorithms - AppDocument8 pagesComparative - Study - of - Edge - Detection - Algorithms - AppEdwin Giovanny Giron AmayaNo ratings yet
- Fabrication 20 and 20 Alignment 20 Issues 20 For 20 Segmented 20 Mirror 20 TelescopesDocument12 pagesFabrication 20 and 20 Alignment 20 Issues 20 For 20 Segmented 20 Mirror 20 TelescopesIshaq Khan IKNo ratings yet
- Image Segmentation Using Discontinuity Based ApproachDocument7 pagesImage Segmentation Using Discontinuity Based Approach18H51A05C3-Ande Dheeraj Reddy B.Tech CSE (2018-22)No ratings yet
- Fjortoft IEEE Trans GRS 1998Document10 pagesFjortoft IEEE Trans GRS 1998Andrea FieldsNo ratings yet
- Prediction-Based Geometric Feature Extraction For 2D Laser ScannerDocument8 pagesPrediction-Based Geometric Feature Extraction For 2D Laser ScannerHector VergaraNo ratings yet
- Estimación de La Forma Del Blanco Aplicada A Radar PasivoDocument13 pagesEstimación de La Forma Del Blanco Aplicada A Radar PasivoNelson CruzNo ratings yet
- Chandra: X-Ray Center The HRMA User's GuideDocument21 pagesChandra: X-Ray Center The HRMA User's GuideJosé Vergara PáezNo ratings yet
- Comprehensive Eye Exam Device: OPD-Scan IIIDocument6 pagesComprehensive Eye Exam Device: OPD-Scan IIIFreeNo ratings yet
- 2 Theory of Optical Coherence Tomography: × 2 Fiber-Optic Coupler ImplementDocument26 pages2 Theory of Optical Coherence Tomography: × 2 Fiber-Optic Coupler ImplementBrown LeeNo ratings yet
- Motion Parameters Estimation Based On Improved Radon Transform For Blurred Star ImageDocument6 pagesMotion Parameters Estimation Based On Improved Radon Transform For Blurred Star ImageSwarnali BanerjeeNo ratings yet
- Expert Systems with Applications journal evaluates automatic weld defect inspectionDocument13 pagesExpert Systems with Applications journal evaluates automatic weld defect inspectionaliNo ratings yet
- Poster Europa Front ADocument2 pagesPoster Europa Front ALucia SuarezNo ratings yet
- Aa33272 18Document18 pagesAa33272 18Lucia SuarezNo ratings yet
- Vdocuments - MX - Optical Design With Zemax For PHD Iapuni Jenade DesignwithzemaxforphdDocument59 pagesVdocuments - MX - Optical Design With Zemax For PHD Iapuni Jenade DesignwithzemaxforphdLucia SuarezNo ratings yet
- Calibration 2016Document15 pagesCalibration 2016Lucia SuarezNo ratings yet
- Fundamentals of Power and Energy Measurement: Thermopile DetectorDocument8 pagesFundamentals of Power and Energy Measurement: Thermopile DetectorLucia SuarezNo ratings yet
- Lens DesignDocument481 pagesLens DesignLucia SuarezNo ratings yet
- Characterizing atmospheric turbulence for LSST using Gemini telescope dataDocument10 pagesCharacterizing atmospheric turbulence for LSST using Gemini telescope dataLucia SuarezNo ratings yet
- Characterizing atmospheric turbulence for LSST using Gemini telescope dataDocument10 pagesCharacterizing atmospheric turbulence for LSST using Gemini telescope dataLucia SuarezNo ratings yet
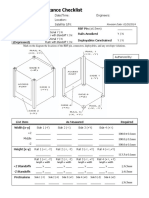
- 1U Cubesat Acceptance Checklist: Project: Date/Time: Engineers: Organization: Location: Satellite Name: Satellite S/NDocument5 pages1U Cubesat Acceptance Checklist: Project: Date/Time: Engineers: Organization: Location: Satellite Name: Satellite S/NLucia SuarezNo ratings yet
- Fabrication of the DESI Corrector LensesDocument9 pagesFabrication of the DESI Corrector LensesLucia SuarezNo ratings yet
- 1712 06986Document11 pages1712 06986Lucia SuarezNo ratings yet
- Measuring The Mass Distribution in Stellar Systems: Scott TremaineDocument11 pagesMeasuring The Mass Distribution in Stellar Systems: Scott TremaineLucia SuarezNo ratings yet
- Classical NovaeDocument396 pagesClassical NovaeLucia SuarezNo ratings yet
- 1712 08619Document19 pages1712 08619Lucia SuarezNo ratings yet
- Robert A. Day, Nancy Sakaduski-Scientific English - A Guide For Scientists and Other Professionals-Greenwood (2011) PDFDocument242 pagesRobert A. Day, Nancy Sakaduski-Scientific English - A Guide For Scientists and Other Professionals-Greenwood (2011) PDFLucia Suarez100% (1)
- Determination of The Spectroscopic Stellar Parameters For 257 Field Giant StarsDocument17 pagesDetermination of The Spectroscopic Stellar Parameters For 257 Field Giant StarsLucia SuarezNo ratings yet
- C/O Ratios of Stars With Transiting Hot Jupiter ExoplanetsDocument18 pagesC/O Ratios of Stars With Transiting Hot Jupiter ExoplanetsLucia SuarezNo ratings yet
- The Elemental Abundances of 518 FGK Stars and Planetary ImplicationsDocument44 pagesThe Elemental Abundances of 518 FGK Stars and Planetary ImplicationsLucia SuarezNo ratings yet
- Galactic Thick Disk Stellar Abundances Reveal Distinct Chemical HistoryDocument37 pagesGalactic Thick Disk Stellar Abundances Reveal Distinct Chemical HistoryLucia SuarezNo ratings yet
- Unit IiiDocument133 pagesUnit Iiiparth_iarjunNo ratings yet
- AC Generator: Working, Construction and ApplicationsDocument15 pagesAC Generator: Working, Construction and ApplicationsSPS KUSHWAHANo ratings yet
- Emtl Unit-VDocument26 pagesEmtl Unit-VBck SreedharNo ratings yet
- Optical Fiber CommunicationDocument71 pagesOptical Fiber CommunicationWasimul Haq WasimulNo ratings yet
- Locking of Hene Laser Modes Induced by Synchronous Intracavity ModulationDocument3 pagesLocking of Hene Laser Modes Induced by Synchronous Intracavity ModulationMohamad paidarNo ratings yet
- Single Beam SpectrophotometerDocument18 pagesSingle Beam SpectrophotometerGiachintakartikaNo ratings yet
- Sim Topic 1 - PHH1142 - Odl-2021-Luc-EditedDocument8 pagesSim Topic 1 - PHH1142 - Odl-2021-Luc-EditedHazrina HamidNo ratings yet
- Light As Electromagnetic WaveDocument16 pagesLight As Electromagnetic Wavecreed60No ratings yet
- ILLUMINATION Semi FinalDocument8 pagesILLUMINATION Semi FinalDonna MelgarNo ratings yet
- Reaction PaperDocument6 pagesReaction PaperAngelo Escoro Dante100% (1)
- Physics - XII PB I Marking Scheme-Set A - 22-23Document10 pagesPhysics - XII PB I Marking Scheme-Set A - 22-23Mohd AqeelNo ratings yet
- Optical Instruments1Document225 pagesOptical Instruments1SrithipReddyNo ratings yet
- Geometrical Optics ResonanceDocument8 pagesGeometrical Optics ResonanceArush Nagpal50% (2)
- Saliency Modelling On PMSMDocument6 pagesSaliency Modelling On PMSMmizamaeNo ratings yet
- Light Wave Interference ExplainedDocument26 pagesLight Wave Interference ExplainedSamara CardenasNo ratings yet
- Overview of International Lighting StandardsDocument40 pagesOverview of International Lighting StandardsLazuardi ImamiNo ratings yet
- Ray Optics & Optical Instruments QuizDocument5 pagesRay Optics & Optical Instruments Quizankith sNo ratings yet
- ORL & Back Reflection GuideDocument3 pagesORL & Back Reflection GuideAmir SalahNo ratings yet
- ELK 371E Lecture IV Problem SetDocument5 pagesELK 371E Lecture IV Problem SetFırat YılmazNo ratings yet
- Interior Lamp DesignDocument13 pagesInterior Lamp DesignLihanam KhanNo ratings yet
- Bahir Dar University Chapter on IlluminationDocument171 pagesBahir Dar University Chapter on IlluminationtemamNo ratings yet
- Integrated SLT/YAG PlatformDocument6 pagesIntegrated SLT/YAG Platformhatem elkilaniNo ratings yet
- Zyled Z FP6060 45WDocument5 pagesZyled Z FP6060 45WLuciliano SaezNo ratings yet
- Application of Molecular Absorption SpectrosDocument52 pagesApplication of Molecular Absorption SpectrosVeliana Teta100% (1)
- Quintessence Round - The System Solution For Excellent Visual ComfortDocument5 pagesQuintessence Round - The System Solution For Excellent Visual ComfortAbdelrahman HassanNo ratings yet
- Erco Guide 3 Indoor Lighting enDocument75 pagesErco Guide 3 Indoor Lighting enGilberto A. YlaganNo ratings yet
- 5 Michelson InterferometerDocument8 pages5 Michelson InterferometerSahrish RaeesNo ratings yet
- Aberration of LightDocument9 pagesAberration of LightNaymur RahmanNo ratings yet
- Understanding Lenses and Vision DefectsDocument27 pagesUnderstanding Lenses and Vision DefectsJohn Lester GenizeraNo ratings yet
- Igcse Physics c9 Prac QuesDocument6 pagesIgcse Physics c9 Prac QueshuxxiNo ratings yet