You might also like
- Cat c32 - Manual de Partes PDFDocument374 pagesCat c32 - Manual de Partes PDFGALAXY FORCES100% (16)
- Manual 3516 CatDocument126 pagesManual 3516 CatJairo Alonso Toloza93% (41)
- Cat C32Document148 pagesCat C32Luis-Alfonso Marquez Gonzalez78% (9)
- Motor Mtu 5362010580 - 16V2000C12Document127 pagesMotor Mtu 5362010580 - 16V2000C12Bruna Rahd100% (1)
- Condition Based Maintenance Optimization Considering Multiple ObjectivesDocument9 pagesCondition Based Maintenance Optimization Considering Multiple ObjectivesManojkumar KothandapaniNo ratings yet
- A Multi-Criterion Decision-Making On Preventive MaintenanceDocument9 pagesA Multi-Criterion Decision-Making On Preventive Maintenanceieom2012No ratings yet
- Condition-Based Maintenance: A Case Study Focusing On The Managerial and Operational FactorsDocument12 pagesCondition-Based Maintenance: A Case Study Focusing On The Managerial and Operational FactorsRuthieNo ratings yet
- Application of Topsis in Selection of Maintenance Model For Gas A Processing PlantDocument6 pagesApplication of Topsis in Selection of Maintenance Model For Gas A Processing PlantInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- An Integer Linear ProgrammingDocument26 pagesAn Integer Linear ProgrammingFilipe CarneiroNo ratings yet
- Quantifying The Effects of Production Maintenance Decisions Using Discrete Event SimulationDocument9 pagesQuantifying The Effects of Production Maintenance Decisions Using Discrete Event SimulationDavid NyanguNo ratings yet
- Risk-Based Maintenance Strategy for Petrochemical Reforming SystemsDocument6 pagesRisk-Based Maintenance Strategy for Petrochemical Reforming SystemsAramis Alfonso LlanesNo ratings yet
- Implementation of Total Productive MaintenanceDocument17 pagesImplementation of Total Productive MaintenanceChinmay DalviNo ratings yet
- An Uncertain Programming Model For Preventive Maintenance SchedulingDocument12 pagesAn Uncertain Programming Model For Preventive Maintenance Schedulingnovendi eko nugrohoNo ratings yet
- TPM RCMDocument15 pagesTPM RCMflih khadidjaNo ratings yet
- Monte Carlo method for plant availability modelingDocument13 pagesMonte Carlo method for plant availability modelingdanilo sotoNo ratings yet
- RBM strategy for power plant risk reductionDocument13 pagesRBM strategy for power plant risk reductionOsu AmpawanonNo ratings yet
- Literature Review (Charles Dissertation)Document7 pagesLiterature Review (Charles Dissertation)Jeff EmiNo ratings yet
- Integrating Reliability-Centered Maintenance With Cost Optimization e Application in Plant of Hard Chrome PlatingDocument8 pagesIntegrating Reliability-Centered Maintenance With Cost Optimization e Application in Plant of Hard Chrome PlatingDaniloNo ratings yet
- Kumar 2017Document42 pagesKumar 2017mellouli mohjaNo ratings yet
- A combined goal programming—AHP approach to maintenance selectionDocument10 pagesA combined goal programming—AHP approach to maintenance selectiontarkan varmaNo ratings yet
- ACTIVIDAD1 - Practical Aspects of The Application of RCMDocument10 pagesACTIVIDAD1 - Practical Aspects of The Application of RCMeduardoperez.uniNo ratings yet
- Maintenance Planning Based On Computer-Aided Preventive Maintenance PolicyDocument6 pagesMaintenance Planning Based On Computer-Aided Preventive Maintenance Policyuamiranda3518No ratings yet
- Maintenance Management of Tractors and Agricultural Machinery PDFDocument13 pagesMaintenance Management of Tractors and Agricultural Machinery PDFIg0r91100% (1)
- JurnalDocument19 pagesJurnalDelicia SalsabilaNo ratings yet
- How To Choose Between Maintenance Policies 6Document14 pagesHow To Choose Between Maintenance Policies 6orlandoduran100% (1)
- Applications of Maintenance OptimizationDocument12 pagesApplications of Maintenance OptimizationmelatorNo ratings yet
- PART B - Polar Cush vcDocument14 pagesPART B - Polar Cush vcdennisNo ratings yet
- Research Paper Maintenance Strategy and Decision Making - Ahp MethodDocument3 pagesResearch Paper Maintenance Strategy and Decision Making - Ahp Methodprasad kNo ratings yet
- Part bDocument15 pagesPart bdennisNo ratings yet
- Maintenance Strategy SelectionDocument5 pagesMaintenance Strategy SelectionChris HeydenrychNo ratings yet
- 2 1 1 JiomDocument8 pages2 1 1 Jiomjerome okoyeNo ratings yet
- RBM Strategy Using FMEA for Catalytic Reforming PlantDocument8 pagesRBM Strategy Using FMEA for Catalytic Reforming PlantNur Azizah NasutionNo ratings yet
- 07 ZhouDocument8 pages07 ZhouAbdelghani BouchaalaNo ratings yet
- Fuzzy AHP Method for Selecting Optimum Maintenance StrategiesDocument13 pagesFuzzy AHP Method for Selecting Optimum Maintenance StrategiesMary Jane DuranNo ratings yet
- Techniques and Indices For Preventive Maintenance OptimizationDocument6 pagesTechniques and Indices For Preventive Maintenance OptimizationGopi SubramaniamNo ratings yet
- Comparative Aspects Between TPM and World Class Maintenance - Literature ReviewDocument7 pagesComparative Aspects Between TPM and World Class Maintenance - Literature ReviewDaniel RoyNo ratings yet
- Publicacion de MttoDocument6 pagesPublicacion de MttoRaul CastroNo ratings yet
- A Field Methodology For The Control of Musculoskeletal InjuriesDocument14 pagesA Field Methodology For The Control of Musculoskeletal InjuriesIbañez AlejandroNo ratings yet
- Reliability Centered Maintenance - Wikipedia PDFDocument37 pagesReliability Centered Maintenance - Wikipedia PDFEndhy Wisnu NovindraNo ratings yet
- Model MulticriteriaDocument13 pagesModel MulticriteriaLucas FerreiraNo ratings yet
- Methods and Tools Used in Criticality Analysis in Industrial SystemsDocument18 pagesMethods and Tools Used in Criticality Analysis in Industrial SystemsLeandro Baran100% (1)
- 2020 ZeinalnezhadDocument14 pages2020 ZeinalnezhadDaniel Huachani CoripunaNo ratings yet
- True Optimization of Pavement MaintenancDocument12 pagesTrue Optimization of Pavement Maintenancshravan38No ratings yet
- Reliability Engineering and System Safety: Enrico Zio, Michele CompareDocument13 pagesReliability Engineering and System Safety: Enrico Zio, Michele Compareuamiranda3518No ratings yet
- CBM & RCM Applied On Nuclear Power PlantsDocument11 pagesCBM & RCM Applied On Nuclear Power PlantsGeert Henk WijnantsNo ratings yet
- Optimizacion Mantenimiento Preventivo y FallasDocument11 pagesOptimizacion Mantenimiento Preventivo y FallasJorgeNo ratings yet
- 2699-Full-Length Manuscripts-7584-1-10-20201204Document14 pages2699-Full-Length Manuscripts-7584-1-10-20201204Engineering RubixNo ratings yet
- Expert Systems With Applications: Van Tung Tran, Bo-Suk YangDocument12 pagesExpert Systems With Applications: Van Tung Tran, Bo-Suk Yangcgarciag3250No ratings yet
- Statistical Analysis of Caterpillar 793D Haul Truck Engine DataDocument10 pagesStatistical Analysis of Caterpillar 793D Haul Truck Engine DataSaul Leonidas Astocaza AntonioNo ratings yet
- RCM Alan PrideDocument16 pagesRCM Alan PrideambuenaflorNo ratings yet
- Relationship Between TPM and RCM for Improved MaintenanceDocument14 pagesRelationship Between TPM and RCM for Improved MaintenanceGonzaloNo ratings yet
- Maintenance Strategy Selection A Case Study PDFDocument22 pagesMaintenance Strategy Selection A Case Study PDForlandoduran50% (2)
- Admin 2552 6047 1 LeDocument8 pagesAdmin 2552 6047 1 LeJoseph RiverosNo ratings yet
- Shahin 2018 Developing A Decision Making Grid FDocument17 pagesShahin 2018 Developing A Decision Making Grid FLucia QuispeNo ratings yet
- Multi-objective integrated optimization of preventive maintenance planning and production schedulingDocument11 pagesMulti-objective integrated optimization of preventive maintenance planning and production schedulingJai PandeyNo ratings yet
- Gestión de MttoDocument23 pagesGestión de MttoDaniel VilcapomaNo ratings yet
- Optimal Solution For Multi-Objective Facility Layout Problem Using Genetic AlgorithmDocument7 pagesOptimal Solution For Multi-Objective Facility Layout Problem Using Genetic AlgorithmshubNo ratings yet
- AvailabilityDocument9 pagesAvailabilityMuhd Fadzlee ZNo ratings yet
- A Review On Condition-Based Maintenance Optimization Models For Stochastically Deteriorating SystemDocument42 pagesA Review On Condition-Based Maintenance Optimization Models For Stochastically Deteriorating SystemCESARALARCON1No ratings yet
- Reliability Centered Preventive Maintenance Optimization For Aircraft IndicatorsDocument7 pagesReliability Centered Preventive Maintenance Optimization For Aircraft IndicatorsAziz FahrurNo ratings yet
- Cost of Poor MaintenanceDocument11 pagesCost of Poor MaintenanceSaulo CabreraNo ratings yet
- Ranking Maintenance Sustainability Strategies Using PROMETHEE and Fuzzy EntropyDocument18 pagesRanking Maintenance Sustainability Strategies Using PROMETHEE and Fuzzy EntropyCarlos Augusto Sánchez RondónNo ratings yet
- Carbon Balance EquationDocument18 pagesCarbon Balance EquationBruna RahdNo ratings yet
- Passenger cars, light trucks, heavy vehicles, buses and motorcycles emission factorsDocument142 pagesPassenger cars, light trucks, heavy vehicles, buses and motorcycles emission factorsBruna RahdNo ratings yet
- Standardized Emissions Inventory Methodology For Open Pit Mining AreasDocument17 pagesStandardized Emissions Inventory Methodology For Open Pit Mining Areassaurabh shrivastavaNo ratings yet
- Statistical Analysis of Caterpillar 793D Haul Truck Engine DataDocument10 pagesStatistical Analysis of Caterpillar 793D Haul Truck Engine DataSaul Leonidas Astocaza AntonioNo ratings yet
- Comparing estimates of sectoral greenhouse gas reduction potentials from top-down and bottom-up modelsDocument16 pagesComparing estimates of sectoral greenhouse gas reduction potentials from top-down and bottom-up modelsBruna RahdNo ratings yet
- Carbon Balance EquationDocument18 pagesCarbon Balance EquationBruna RahdNo ratings yet
- Energies 13 05073 v2Document24 pagesEnergies 13 05073 v2Bruna RahdNo ratings yet
- Moseni Antenna For LTE ApplicationsDocument17 pagesMoseni Antenna For LTE ApplicationsBruna RahdNo ratings yet
- A Study of Operational Deviation Control To Reduce Diesel Fuel Consumption of A Hundred Tons Mine HaultruckDocument10 pagesA Study of Operational Deviation Control To Reduce Diesel Fuel Consumption of A Hundred Tons Mine HaultruckBruna RahdNo ratings yet
- Kubler K BakerDocument145 pagesKubler K BakerSimon FerezNo ratings yet
- A Condition-Based Replacement and Spare Provisioning PolicyDocument22 pagesA Condition-Based Replacement and Spare Provisioning PolicyBruna RahdNo ratings yet
- Analyses of Diesel Use For Mine Haul and Transport OperationsDocument20 pagesAnalyses of Diesel Use For Mine Haul and Transport OperationsMichael Adu-boahenNo ratings yet
- Operation and Maintenance Manual: 3500B Series II and 3500C Marine Propulsion EnginesDocument144 pagesOperation and Maintenance Manual: 3500B Series II and 3500C Marine Propulsion EnginesRuslanRumyantsev100% (1)
- Operating Instructions: Diesel Engine 12V2000M91 16V2000M91Document169 pagesOperating Instructions: Diesel Engine 12V2000M91 16V2000M91Bruna Rahd100% (1)
- Operation and Maintenance Manual: 3500B Series II and 3500C Marine Propulsion EnginesDocument144 pagesOperation and Maintenance Manual: 3500B Series II and 3500C Marine Propulsion EnginesRuslanRumyantsev100% (1)
- 3512C and 3516C MARINE Auxiliary Engines: Maintenance IntervalsDocument55 pages3512C and 3516C MARINE Auxiliary Engines: Maintenance IntervalsMohamed Sharawey100% (2)
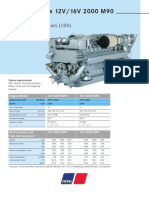
- Mtu 12v&16v2000m90Document2 pagesMtu 12v&16v2000m90Bruna RahdNo ratings yet
- The Big Book of Sales PlaysDocument22 pagesThe Big Book of Sales PlaysBruna RahdNo ratings yet
- 730e 81 PDFDocument16 pages730e 81 PDFNicole SmithNo ratings yet
- Maersk QuestionnaireDocument43 pagesMaersk QuestionnaireSahil SharmaNo ratings yet
- Interfacial Phenomena in Pharmaceutical FormulationDocument21 pagesInterfacial Phenomena in Pharmaceutical FormulationNickson DrabeNo ratings yet
- Water Spray Nozzle: Fire Fighting Equipment Data SheetDocument7 pagesWater Spray Nozzle: Fire Fighting Equipment Data SheetJosef MadronaNo ratings yet
- Fundamental aim training routines and benchmarksDocument8 pagesFundamental aim training routines and benchmarksAchilles SeventySevenNo ratings yet
- Newton's Laws of Motion Summative TestDocument1 pageNewton's Laws of Motion Summative TestXHiri Pabuaya MendozaNo ratings yet
- API Calcs Rev1 (Version 2)Document112 pagesAPI Calcs Rev1 (Version 2)Jake Sparrow100% (1)
- English HL Grade 8 Language Exam Nov 2017 MEMODocument12 pagesEnglish HL Grade 8 Language Exam Nov 2017 MEMOThegn's PicklesNo ratings yet
- Mathematical Structures of The UniverseDocument228 pagesMathematical Structures of The UniverseMaki MajomNo ratings yet
- Waste Management in Vienna. MA 48Document12 pagesWaste Management in Vienna. MA 484rtttt4ttt44No ratings yet
- Akbh PSK (V), TRBH As Y: AdhimokṣADocument8 pagesAkbh PSK (V), TRBH As Y: AdhimokṣA张晓亮No ratings yet
- Packaging Materials and Handling Technique: Dr. Ranjeet SinghDocument48 pagesPackaging Materials and Handling Technique: Dr. Ranjeet Singharon demagiba100% (1)
- Miniaturized 90 Degree Hybrid Coupler Using High Dielectric Substrate For QPSK Modulator PDFDocument4 pagesMiniaturized 90 Degree Hybrid Coupler Using High Dielectric Substrate For QPSK Modulator PDFDenis CarlosNo ratings yet
- Hyundai-25 30 33L 35LN-9A19.01Rev.6 Eng-D4 PDFDocument20 pagesHyundai-25 30 33L 35LN-9A19.01Rev.6 Eng-D4 PDFVicente Antonio GonzalezNo ratings yet
- Module 2 Chem 1Document25 pagesModule 2 Chem 1melissa cabreraNo ratings yet
- Tugas Bahasa Inggris-1Document8 pagesTugas Bahasa Inggris-1Nur KomariyahNo ratings yet
- Fi & EiDocument3 pagesFi & EiPrasanna S Kulkarni100% (1)
- SaponificationDocument2 pagesSaponificationK.SaravananNo ratings yet
- AAB 075323 EPDM Waterproofing Membrane (For RC Roof Build-Up Inc. Insulation)Document3 pagesAAB 075323 EPDM Waterproofing Membrane (For RC Roof Build-Up Inc. Insulation)tewodrosNo ratings yet
- Worthy - Elevation WorshipDocument1 pageWorthy - Elevation WorshipSabine J.100% (1)
- Bathymetry and Its Applications PDFDocument158 pagesBathymetry and Its Applications PDFArseni MaximNo ratings yet
- TheologicalDiscipleship English 2011-1Document144 pagesTheologicalDiscipleship English 2011-1bilnyangnatNo ratings yet
- Solvent Extraction: Please Submit Question 4 For MarkingDocument3 pagesSolvent Extraction: Please Submit Question 4 For MarkingThembi Matebula100% (1)
- Flow Forming PresentatiionDocument24 pagesFlow Forming PresentatiionSrinivas Ds100% (1)
- Bronchiolitis A Practical Approach For The General RadiologistDocument42 pagesBronchiolitis A Practical Approach For The General RadiologistTara NareswariNo ratings yet
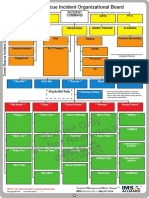
- Sample Only Do Not Reproduce: Trench Rescue Incident Organizational BoardDocument1 pageSample Only Do Not Reproduce: Trench Rescue Incident Organizational BoardLuis Diaz CerdanNo ratings yet
- Alaina W - Food Project ReflectionDocument1 pageAlaina W - Food Project Reflectionapi-438601399No ratings yet
- Oxford SuprEsser ManualDocument34 pagesOxford SuprEsser ManualaaaNo ratings yet
- Eliminating False Detection: Sensing Guide Pulse Level SensorDocument16 pagesEliminating False Detection: Sensing Guide Pulse Level SensorRafael MirandaNo ratings yet
- Jean NouvelDocument1 pageJean Nouvelc.sioson.540553No ratings yet
- Autocad Lab ManualDocument84 pagesAutocad Lab ManualRaghu RamNo ratings yet