You might also like
- 西子奥的斯电梯ACD2 MRL调试指导Document54 pages西子奥的斯电梯ACD2 MRL调试指导Ar666No ratings yet
- Modrol MF MSDocument63 pagesModrol MF MSJackam kamNo ratings yet
- Ncr Atm故障代码手册Document64 pagesNcr Atm故障代码手册Gilbert KamanziNo ratings yet
- YEJ (3), YDEJ (3) Gearmotors, Gearboxes, VFD and Electric Motors Drive Solutions For Industries.Document21 pagesYEJ (3), YDEJ (3) Gearmotors, Gearboxes, VFD and Electric Motors Drive Solutions For Industries.Gear motorsNo ratings yet
- vs1 51利用轉速倍頻估測技術應用於振動診斷Document34 pagesvs1 51利用轉速倍頻估測技術應用於振動診斷林唯中No ratings yet
- 20151030 传输、电源设备技术指标Document57 pages20151030 传输、电源设备技术指标Anonymous 2ybd4gNo ratings yet
- 普物Hw07Document6 pages普物Hw07AyayaNo ratings yet
- 常用 交流馬達 馬力 電流對應表Document6 pages常用 交流馬達 馬力 電流對應表000-547105100% (2)
- SDK-Python Manual ZH V1.0Document28 pagesSDK-Python Manual ZH V1.0Chandru ChristurajNo ratings yet
- S7-300 教程从入门到精通 (中文)Document237 pagesS7-300 教程从入门到精通 (中文)Aryo Prastyo AjiNo ratings yet
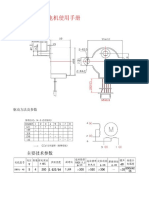
- 24BYJ48 步进电机使用手册Document7 pages24BYJ48 步进电机使用手册cqlNo ratings yet
- 温州制造业 oracle笔试题目Document6 pages温州制造业 oracle笔试题目Roy PayneNo ratings yet
- 11 采用TRIP2 0软件模拟运输机类外形Document6 pages11 采用TRIP2 0软件模拟运输机类外形backfire0No ratings yet
- K2CGDocument4 pagesK2CGBlaire DainesNo ratings yet
- K文件手册【wkf】Document10 pagesK文件手册【wkf】Kaifei WangNo ratings yet
- ComputDocument16 pagesComput[4C28] Yu Shing Hei 俞承希No ratings yet
- Dealour c7Document128 pagesDealour c7chiduwiNo ratings yet
- 附錄A MIPS CPU指令集格式Document59 pages附錄A MIPS CPU指令集格式Elisa TsanNo ratings yet
- 我是Block层 - 副本Document117 pages我是Block层 - 副本scribdwwNo ratings yet
- 80t11 Tablas de Cubicacion de TTPDocument1 page80t11 Tablas de Cubicacion de TTPArmado GarciaNo ratings yet
- AN00275 BandR SDC Using The Touchprobe Function RevA CNDocument6 pagesAN00275 BandR SDC Using The Touchprobe Function RevA CNdave chaudhuryNo ratings yet
- Prctica 1 Inv. OperativaDocument23 pagesPrctica 1 Inv. OperativaDanitza Condo PerezNo ratings yet
- PZ 20MT說明書Document18 pagesPZ 20MT說明書smith_raNo ratings yet
- Robin Nano CFGDocument7 pagesRobin Nano CFGVictor OrtizNo ratings yet
- (4 7 2) - 4 7DataFrame修改操作综合文档Document2 pages(4 7 2) - 4 7DataFrame修改操作综合文档Pandeng LiNo ratings yet
- GF3说明书 (001 039)Document39 pagesGF3说明书 (001 039)home madeNo ratings yet
- #1,2机组一次风机动叶卡涩检查方案 打印Document10 pages#1,2机组一次风机动叶卡涩检查方案 打印Thái BùiNo ratings yet
- EP说明书Document88 pagesEP说明书Thai TranNo ratings yet
- 红外遥控接收模块套件用户手册2010 10 25Document14 pages红外遥控接收模块套件用户手册2010 10 25chqfu2002No ratings yet
- 3 CLEAL CP2 Filter (English) JH-35312216Document2 pages3 CLEAL CP2 Filter (English) JH-35312216Milimas Tirta SolusiNo ratings yet
- windows内核高级篇 - 副本Document88 pageswindows内核高级篇 - 副本宛俊No ratings yet
- S7-200 伺服馬達速度追隨變頻馬達 - v0Document12 pagesS7-200 伺服馬達速度追隨變頻馬達 - v0Bob0526100% (2)
- simulink使用技巧1Document2 pagessimulink使用技巧1yunfeng.leeNo ratings yet
- Mac Rosyn TecDocument43 pagesMac Rosyn Tecthope_baekNo ratings yet
- Chromebook出廠內測 SOPDocument27 pagesChromebook出廠內測 SOP黃強尼No ratings yet
- SBF 系列 V121Document106 pagesSBF 系列 V121Santiago AndradeNo ratings yet
- ENSP笔记Document36 pagesENSP笔记ra KamisoNo ratings yet
- 20080701 093 工業自動化實驗上課講義Document23 pages20080701 093 工業自動化實驗上課講義engineeringhandbook100% (1)
- 型錄 IE3Document6 pages型錄 IE3李豐裕No ratings yet
- 高低温试验7 16Document1 page高低温试验7 16cuserNo ratings yet
- Termostato Digital XevDocument5 pagesTermostato Digital XevPubli CadorNo ratings yet
- SK 727299045 221121 1732 136Document15 pagesSK 727299045 221121 1732 136Saya SayaNo ratings yet
- Pc15050if5473 240217 SR6HP ZH ElettrDocument239 pagesPc15050if5473 240217 SR6HP ZH Elettripasrl.guestNo ratings yet
- MB Manual Z790-Ae-Series 1102 C 231109Document44 pagesMB Manual Z790-Ae-Series 1102 C 231109Om YansenNo ratings yet
- $ 贝尔7360 EPON快速配置文档-v1.0Document7 pages$ 贝尔7360 EPON快速配置文档-v1.0andrew chiangNo ratings yet
- 運動體軌跡和相關物理量測量Document6 pages運動體軌跡和相關物理量測量顏子皓No ratings yet
- 過電流保護電驛操作手冊Document39 pages過電流保護電驛操作手冊kokonut1128No ratings yet
- E3533s-2TCPU-V200R002B318D27SP00C441&WEBUI-V100R005B100D10SP01C441 Version Configuration Information FormDocument2 pagesE3533s-2TCPU-V200R002B318D27SP00C441&WEBUI-V100R005B100D10SP01C441 Version Configuration Information FormAlexandru DumbravaNo ratings yet
- 如何玩儿转控制参数设计?有哪些段位? 公众号文章v0.6修改Document10 pages如何玩儿转控制参数设计?有哪些段位? 公众号文章v0.6修改HAN JUNo ratings yet
- 350Document52 pages350Aros IsaiasNo ratings yet
- DCS控制系统基础知识Document59 pagesDCS控制系统基础知识QianheSuNo ratings yet
- bat脚本教程v1 0Document56 pagesbat脚本教程v1 0张洋No ratings yet
- FK3U 24MT 6AI2AO使用手册Document12 pagesFK3U 24MT 6AI2AO使用手册Nguyễn Đăng Đức100% (1)
- Normal Math SkillsDocument56 pagesNormal Math Skillscam10307No ratings yet
- matlab简明教程 PDFDocument72 pagesmatlab简明教程 PDFdanielNo ratings yet
- 封包擷取與分析Document6 pages封包擷取與分析dc0937No ratings yet
- SmartPosAndroidSDK EMV - V2.0.0 - 20190312Document31 pagesSmartPosAndroidSDK EMV - V2.0.0 - 20190312Christian AsarhasaNo ratings yet
- FC991AI Fault+ (FC991) ErwDocument2 pagesFC991AI Fault+ (FC991) Erw谐和No ratings yet
- MatlabDocument147 pagesMatlabEthan LiNo ratings yet
- 1.2 童年絮味Document39 pages1.2 童年絮味yuxin yeoNo ratings yet
- PM Motor AdjustDocument4 pagesPM Motor AdjustdupreemNo ratings yet
- Pattern RecognitionDocument22 pagesPattern RecognitionDavid ZambranoNo ratings yet
- 时代来临!中国低轨巨型星座国际申报开启!Document27 pages时代来临!中国低轨巨型星座国际申报开启!Jordan SchneiderNo ratings yet
- WP Contentuploads2018102017 DSE PHY 2 MS 1 PDFDocument3 pagesWP Contentuploads2018102017 DSE PHY 2 MS 1 PDF香志聪No ratings yet