You might also like
- 2.2 - Mathematical Modeling & Transfer Function PDFDocument25 pages2.2 - Mathematical Modeling & Transfer Function PDFFatinnnnnn100% (1)
- Advanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterDocument21 pagesAdvanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterBá Linh NguyễnNo ratings yet
- Small Signal Transfer Functions and Mathematical Model of The Boost Power ConverterDocument6 pagesSmall Signal Transfer Functions and Mathematical Model of The Boost Power ConverterNtokozo HlatshwayoNo ratings yet
- Process Reaction Curve Model IdentificationDocument17 pagesProcess Reaction Curve Model IdentificationANDRÉS FELIPE SOTO CUELLARNo ratings yet
- Boost Converter PSO PIDDocument13 pagesBoost Converter PSO PIDAliAlMisbahNo ratings yet
- 3.2.1 - Instrumentation - MeasurementDocument15 pages3.2.1 - Instrumentation - MeasurementFnur FatihahNo ratings yet
- Lecture12 Chapter4 - Buck - CCM - AnalysisDocument39 pagesLecture12 Chapter4 - Buck - CCM - AnalysisCarlos Alberto Viancha SalazarNo ratings yet
- Implementation of A High Voltage Power SupplyDocument4 pagesImplementation of A High Voltage Power SupplyJiakeat LiauNo ratings yet
- PDC Lab Manual for ECE Students at SVCETDocument64 pagesPDC Lab Manual for ECE Students at SVCETeswaranNo ratings yet
- Ceic3006 Lecture 3Document74 pagesCeic3006 Lecture 3sarahNo ratings yet
- Integrator and DifferentiatorDocument4 pagesIntegrator and Differentiatoranisankarhari25No ratings yet
- Week 3 - Basic Elements in Control SystemDocument16 pagesWeek 3 - Basic Elements in Control SystemMohd Yashfi YunusNo ratings yet
- 05 - List of SymbolsDocument6 pages05 - List of Symbolsrajath RaviNo ratings yet
- Empirical Models PDFDocument11 pagesEmpirical Models PDFAhmed HummerNo ratings yet
- RL TransientDocument35 pagesRL Transientkrish104411No ratings yet
- Contoh REPORT Open Ended CONTROLDocument32 pagesContoh REPORT Open Ended CONTROLtiko lolipopNo ratings yet
- Development of Empirical Dynamic Models From Step Response DataDocument21 pagesDevelopment of Empirical Dynamic Models From Step Response DatadhiyaulNo ratings yet
- Open-Loop Process Identification: Reformulation of Response Rate CalculationDocument5 pagesOpen-Loop Process Identification: Reformulation of Response Rate CalculationAhmad Ca'inNo ratings yet
- 4 Transfer FunctionDocument22 pages4 Transfer FunctionSalihin FhooziNo ratings yet
- Characteristics and Firing Control of Thyristor Controlled Series Compensation InstallationsDocument5 pagesCharacteristics and Firing Control of Thyristor Controlled Series Compensation Installationsjm.mankavil6230No ratings yet
- ECD Lab 2Document11 pagesECD Lab 2punjabians626621No ratings yet
- Exp 2 InstroDocument16 pagesExp 2 InstroAbed Alrahman QaddourNo ratings yet
- Lec01 1Document63 pagesLec01 1awabnasirahmednasirNo ratings yet
- Check Fig 5Document7 pagesCheck Fig 5Sureshkumar AlagarsamyNo ratings yet
- Turkish PDFDocument13 pagesTurkish PDFramiNo ratings yet
- Alternating CurrentDocument13 pagesAlternating Currentmakivad893No ratings yet
- Dwarkadas. J. Sanghvi College of EngineeringDocument8 pagesDwarkadas. J. Sanghvi College of EngineeringAbir DeyNo ratings yet
- Proportional,: Controllers) DerivativeDocument3 pagesProportional,: Controllers) DerivativeAnonymous R7wV0zbMNo ratings yet
- Modeling and Control of Series Resonant ConverterDocument7 pagesModeling and Control of Series Resonant ConverterKibargoi KipsetmetNo ratings yet
- Exp. 4, Part 2: Converter Transfer FunctionsDocument41 pagesExp. 4, Part 2: Converter Transfer FunctionsMiyuki KazuyaNo ratings yet
- ELE302 - Lab 2-092021Document17 pagesELE302 - Lab 2-092021hughjass39.99No ratings yet
- Revisit: Resistance and Capacitance MOSFET Model For Digital CircuitsDocument33 pagesRevisit: Resistance and Capacitance MOSFET Model For Digital Circuitsdilshan singhNo ratings yet
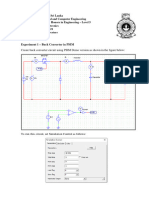
- Eex5453 Lab02 2020-2021Document5 pagesEex5453 Lab02 2020-2021amilapradeepsarangaNo ratings yet
- IJAPE Guideforauthors 2012Document5 pagesIJAPE Guideforauthors 2012Ashish PorwalNo ratings yet
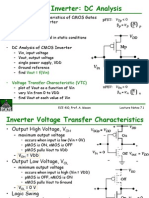
- CMOS Inverter: DC AnalysisDocument32 pagesCMOS Inverter: DC Analysissreekanthreddy peram50% (2)
- On-Chip Measurement of Interconnect CapacitancesDocument5 pagesOn-Chip Measurement of Interconnect CapacitancesAlex WongNo ratings yet
- Analytical Representation of Switching Current ImpDocument6 pagesAnalytical Representation of Switching Current ImpClaudio KaramNo ratings yet
- Process DynamicsDocument80 pagesProcess DynamicsMahmoud MohammadNo ratings yet
- 01 - PDC Study of Step Response of First Order SystemDocument8 pages01 - PDC Study of Step Response of First Order SystemNeena Regi100% (1)
- 15731955056842posz2Document6 pages15731955056842posz2Wilian ChuñirNo ratings yet
- Reducing Emissions in DC-DC Switched Mode Power Supplies by Gentex Corp.Document71 pagesReducing Emissions in DC-DC Switched Mode Power Supplies by Gentex Corp.Miguel PenarandaNo ratings yet
- ECA CAT SolutionsDocument21 pagesECA CAT SolutionsAdan BagajaNo ratings yet
- Lecture 7-8-9Document65 pagesLecture 7-8-9Asad MumtazNo ratings yet
- Assignment 1 - Btech 10040 21Document14 pagesAssignment 1 - Btech 10040 21gvjbhknlkmNo ratings yet
- Capacitor SwitchingDocument5 pagesCapacitor SwitchingbhuvanesbraveNo ratings yet
- ADE PracticalDocument7 pagesADE PracticalLikith VaddadiNo ratings yet
- 07 - ART - Determination of Frequency Characteristics of High Voltage Dividers in Frequency DomainDocument4 pages07 - ART - Determination of Frequency Characteristics of High Voltage Dividers in Frequency DomainLove for gamesNo ratings yet
- Class07 Using Transmission LinesDocument24 pagesClass07 Using Transmission LinesVikram Raj SinghNo ratings yet
- Transfer FunctionsDocument4 pagesTransfer FunctionsAhmed HamoudaNo ratings yet
- Control Systems Engineering: Chapter 2: Modeling in The Frequency DomainDocument55 pagesControl Systems Engineering: Chapter 2: Modeling in The Frequency DomainAphichaya thanchaiNo ratings yet
- Mobile Radio Propagation: Small-Scale Path Loss: EENG473 Mobile Communications Module 3: Week #Document76 pagesMobile Radio Propagation: Small-Scale Path Loss: EENG473 Mobile Communications Module 3: Week #Eyob TadesseNo ratings yet
- 10 1 1 623 275 PDFDocument28 pages10 1 1 623 275 PDFDamir MiletaNo ratings yet
- Experiment 2 BJT SwitchDocument6 pagesExperiment 2 BJT Switchprop_kcp50% (2)
- Lab 7 Dynamic Parameters of 2 Order Measurement SystemsDocument6 pagesLab 7 Dynamic Parameters of 2 Order Measurement Systemsraylo4594No ratings yet
- 04 AC Voltage ControllerDocument20 pages04 AC Voltage Controllerkamlesh jatNo ratings yet
- Jingdao Microelectronics: SS34LFDocument3 pagesJingdao Microelectronics: SS34LFMariano CalandroniNo ratings yet
- Psim SVMDocument9 pagesPsim SVMNarendra ReddyNo ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3Rating: 3 out of 5 stars3/5 (2)
- Essentials of Heat Transfer: Principles, Materials, and Applications, by Massoud KavianyDocument2 pagesEssentials of Heat Transfer: Principles, Materials, and Applications, by Massoud KavianyHarvin WaraichNo ratings yet
- Friction FactorDocument7 pagesFriction FactorSuchart TarasapNo ratings yet
- ER - 1110-2-1806 (Análisis Sísmico)Document26 pagesER - 1110-2-1806 (Análisis Sísmico)Tarax515100% (1)
- Steel Design QDocument3 pagesSteel Design QDave JarangueNo ratings yet
- Lab: Flame Tests: Arellano UniversityDocument2 pagesLab: Flame Tests: Arellano UniversityLouis Fetilo FabunanNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29Document30 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29mahendranNo ratings yet
- 4 - Estatica de Corpos Rigidos - 2Document14 pages4 - Estatica de Corpos Rigidos - 2Rosa MaratNo ratings yet
- Static Equilibrium and ElasticityDocument26 pagesStatic Equilibrium and ElasticitydeeparNo ratings yet
- 3D MECHANISTIC MODEL by Petalas&AzizDocument16 pages3D MECHANISTIC MODEL by Petalas&AzizKirat Purohit100% (2)
- EASA B1.1 Module 6.7 SpringsDocument31 pagesEASA B1.1 Module 6.7 Springscrye shotNo ratings yet
- 4 and 5th Lesson MCQDocument5 pages4 and 5th Lesson MCQDhanush RamanNo ratings yet
- Somom PDFDocument429 pagesSomom PDFChandan ChawanNo ratings yet
- Mass Transfer PartDocument29 pagesMass Transfer Partoctoviancletus100% (5)
- Centrifugation (Separation Processes)Document25 pagesCentrifugation (Separation Processes)Allyana Marie Tiemsim100% (2)
- Properties of Dry GasDocument10 pagesProperties of Dry GasChia Boon ChungNo ratings yet
- (AR) 1867 - On Integrals of The Hydrodynamic Equations, Which Express Vortex-Motion - Helmholtz PDFDocument29 pages(AR) 1867 - On Integrals of The Hydrodynamic Equations, Which Express Vortex-Motion - Helmholtz PDFRodrigo AbdoNo ratings yet
- Leyton - Intraplate and InterplateDocument10 pagesLeyton - Intraplate and InterplateAndres LopezNo ratings yet
- Theory of Metal Cutting FundamentalsDocument24 pagesTheory of Metal Cutting FundamentalsSreehari ViswanathanNo ratings yet
- Section 5 - Manual Transmissions and TransaxlesDocument6 pagesSection 5 - Manual Transmissions and TransaxlesSuzan KhouryNo ratings yet
- Phase Diagram Types and FunctionsDocument4 pagesPhase Diagram Types and FunctionsFarhan FadillahNo ratings yet
- Step 1: Mathematical Modeling: 1 Vibration Analysis ProcedureDocument22 pagesStep 1: Mathematical Modeling: 1 Vibration Analysis ProcedureNirmal JayanthNo ratings yet
- Engineering MechanicsqpDocument14 pagesEngineering MechanicsqpKrishna MurthyNo ratings yet
- CLMD4A Science8Document39 pagesCLMD4A Science8GreyNo ratings yet
- Hong Kong Physics Olympiad 2011 Secondary Written ExamDocument10 pagesHong Kong Physics Olympiad 2011 Secondary Written ExamMichael LeungNo ratings yet
- Free Vibration With Coulomb Damping Examples: With Many Figures and Models From Mechanical Vibrations, S. S. RaoDocument20 pagesFree Vibration With Coulomb Damping Examples: With Many Figures and Models From Mechanical Vibrations, S. S. RaoMihir AsharNo ratings yet
- Footing Design According To BS8110 CodeDocument4 pagesFooting Design According To BS8110 CodePre SheetNo ratings yet
- Nde FormulaDocument6 pagesNde FormulasbmmlaNo ratings yet
- RC Design I ColumnsDocument32 pagesRC Design I Columnseph100% (1)
- Pile Negative FrictionDocument5 pagesPile Negative FrictionmangjuhaiNo ratings yet
- Water: Experimental and Numerical Simulation of Water Hammer in Gravitational Pipe Flow With Continuous Air EntrainmentDocument16 pagesWater: Experimental and Numerical Simulation of Water Hammer in Gravitational Pipe Flow With Continuous Air EntrainmentskyNo ratings yet