You might also like
- Estimation and Modelling of VariogramsDocument8 pagesEstimation and Modelling of VariogramsAshrafNo ratings yet
- Matrix_CalculusDocument8 pagesMatrix_CalculusfadeevlaNo ratings yet
- 6 HandoutDocument5 pages6 Handoutaladar520No ratings yet
- Randy X: Denition: GradientDocument8 pagesRandy X: Denition: GradientAlmog BendaNo ratings yet
- Movie Segment: InstantaneousDocument18 pagesMovie Segment: InstantaneousAwishka ThuduwageNo ratings yet
- Review of Pre-Calculus - Calculus Volume 1 - OpenStaxDocument4 pagesReview of Pre-Calculus - Calculus Volume 1 - OpenStaxShane BuragaNo ratings yet
- Path Following Methods for Nonlinear Structural AnalysisDocument44 pagesPath Following Methods for Nonlinear Structural AnalysisSudip ShresthaNo ratings yet
- PDE AssigDocument6 pagesPDE Assigsahlewel weldemichaelNo ratings yet
- Calculus with vectors and matrices: Matrix differential calculusDocument16 pagesCalculus with vectors and matrices: Matrix differential calculusAnonymous Y2ibaULes1No ratings yet
- L34 PDFDocument8 pagesL34 PDFManchimsetty Sri NidhiNo ratings yet
- Chap 4Document41 pagesChap 4임종윤No ratings yet
- FEM - 8 Stiffness MatrixDocument26 pagesFEM - 8 Stiffness Matrixwiyorejesend22u.infoNo ratings yet
- Module-IV: Macro Mechanical Behavior of LaminateDocument143 pagesModule-IV: Macro Mechanical Behavior of LaminateAbhishek BeraNo ratings yet
- Directional Derivatives and The Gradient: RemarkDocument4 pagesDirectional Derivatives and The Gradient: RemarkHesham ArifNo ratings yet
- Power Series ExampleDocument2 pagesPower Series ExampleneilNo ratings yet
- Chapter4 1 Objectives and CodeDocument15 pagesChapter4 1 Objectives and Codelinthaw babyNo ratings yet
- Derivatives, Backpropagation, and VectorizationDocument7 pagesDerivatives, Backpropagation, and VectorizationAxel StraminskyNo ratings yet
- 4 Topics in Calculus: 4.1 Transformations From ToDocument6 pages4 Topics in Calculus: 4.1 Transformations From ToYanira EspinozaNo ratings yet
- Compressible and Incompressible Viscous Flow EquationsDocument2 pagesCompressible and Incompressible Viscous Flow EquationsnaveenNo ratings yet
- GTR2019 1Document67 pagesGTR2019 1Bhat SaqibNo ratings yet
- Introduction To Nonlinear Control Lecture # 2 Time-Invariant SystemsDocument53 pagesIntroduction To Nonlinear Control Lecture # 2 Time-Invariant SystemsRafeyTahirNo ratings yet
- EnglishDocument1 pageEnglishMohamed FawziNo ratings yet
- Rectilinear Motion GuideDocument35 pagesRectilinear Motion GuideMohamed HwedyNo ratings yet
- Physics 116C Solutions to Homework Set #1Document8 pagesPhysics 116C Solutions to Homework Set #1Ravi RoyNo ratings yet
- 18 Equilibrium Equation of A Laminated Plate (A Laminate)Document8 pages18 Equilibrium Equation of A Laminated Plate (A Laminate)Khalil DeghoumNo ratings yet
- Asymptotic Methods: Example Sheet 1 1: Send Corrections To David Stuart Dmas2@cam - Ac.ukDocument3 pagesAsymptotic Methods: Example Sheet 1 1: Send Corrections To David Stuart Dmas2@cam - Ac.ukHemanth TallaNo ratings yet
- Applying asymptotic methods to complex analysis problemsDocument1 pageApplying asymptotic methods to complex analysis problemsaudaciousribbonNo ratings yet
- Math152 Spring2023 Section11 9Document11 pagesMath152 Spring2023 Section11 9Nate ProvostNo ratings yet
- Boundary Layers Integral Approach 2 - 2024 (1)Document31 pagesBoundary Layers Integral Approach 2 - 2024 (1)Vedant SharmaNo ratings yet
- Chapter 05Document14 pagesChapter 05No MarNo ratings yet
- CALCULUSDocument5 pagesCALCULUS4gjhfv2yvfNo ratings yet
- Introduction to Second Order Optimization MethodsDocument24 pagesIntroduction to Second Order Optimization MethodsSoumya Sankar PandaNo ratings yet
- Chapter 2: Pressure Distribution in A Fluid: 2 Professor Fred Stern Fall 2005 1Document27 pagesChapter 2: Pressure Distribution in A Fluid: 2 Professor Fred Stern Fall 2005 1Masum DenizNo ratings yet
- WPS Solution Work Power EnergyDocument4 pagesWPS Solution Work Power EnergyRahul HebsurNo ratings yet
- Chapter 5. Two-Dimensional Finite Elements: Plane Stress (Thin Members) Out-Of-Plane Normal and Shear Stress Are Zero X yDocument16 pagesChapter 5. Two-Dimensional Finite Elements: Plane Stress (Thin Members) Out-Of-Plane Normal and Shear Stress Are Zero X ysakeriraq81No ratings yet
- 17 - Yield Line Theory For SlabsDocument9 pages17 - Yield Line Theory For SlabsRavindra MR100% (1)
- Static Failure Theories: Introduction To DesignDocument19 pagesStatic Failure Theories: Introduction To DesignJavier Solis TorresNo ratings yet
- Statistics Formulas CheatsheetDocument2 pagesStatistics Formulas Cheatsheetsonsuzakadarccc100% (1)
- 1 Matrisler: X Z XDX X I X XDocument1 page1 Matrisler: X Z XDX X I X Xapi-350250146No ratings yet
- Equations of equilibrium and boundary conditions in elastic bodiesDocument3 pagesEquations of equilibrium and boundary conditions in elastic bodiesAham BrahmasmiNo ratings yet
- SF 2940 FormsDocument23 pagesSF 2940 FormsdeekshaNo ratings yet
- Noether's Theorem: 1 Rotational Symmetry and Conservation of Angular Momentum (2 Dim)Document5 pagesNoether's Theorem: 1 Rotational Symmetry and Conservation of Angular Momentum (2 Dim)Jesus MoralNo ratings yet
- CS229 PS0 Linear Algebra and CalculusDocument2 pagesCS229 PS0 Linear Algebra and CalculusAnonymous aQqan3bxA2No ratings yet
- MA 2261 Probability and Random Processes NotesDocument71 pagesMA 2261 Probability and Random Processes Notesv.kumarNo ratings yet
- X x x x x: x n X x x x x n n X Mo=X l∗ Δ 1 Δ1+Δ2 U n+1 X n xDocument2 pagesX x x x x: x n X x x x x n n X Mo=X l∗ Δ 1 Δ1+Δ2 U n+1 X n xAugustina BrumaretchiNo ratings yet
- Probability and Stochastic ProcessesDocument31 pagesProbability and Stochastic ProcessesVenkateshVedala100% (1)
- Eq Roots1Document10 pagesEq Roots1NARVIN AUGUST DEIPARINENo ratings yet
- QBA Unit-1.77223908Document26 pagesQBA Unit-1.77223908msuriyaprakashNo ratings yet
- Chap1 3Document13 pagesChap1 3River QiuNo ratings yet
- Nonlinear Systems and Control Lecture # 8 Lyapunov StabilityDocument10 pagesNonlinear Systems and Control Lecture # 8 Lyapunov StabilitySauranil DebarshiNo ratings yet
- Lyapunov Stability Lecture NotesDocument10 pagesLyapunov Stability Lecture NotesChampionSudheerNo ratings yet
- Differentials and The Chain Rule: F M F F FDocument2 pagesDifferentials and The Chain Rule: F M F F FRajNo ratings yet
- Engineering Mechanics Formula Sheet Statics and Mechanics of MaterialsDocument1 pageEngineering Mechanics Formula Sheet Statics and Mechanics of MaterialsBussemand12No ratings yet
- LNote 4Document20 pagesLNote 4Jampel kun TsheringNo ratings yet
- Calculus_and_Linear_AlgebraDocument45 pagesCalculus_and_Linear_AlgebraMd parvezsharifNo ratings yet
- 3.0-Support Vector KernelsDocument6 pages3.0-Support Vector Kernelsnavinkumar7197No ratings yet
- Rumus Mat WajibDocument3 pagesRumus Mat WajibEvita CarolineNo ratings yet
- Seismic Resistant Design of Structures: Random VariablesDocument30 pagesSeismic Resistant Design of Structures: Random Variablesprraaddeej chatelNo ratings yet
- The Book of Home How-To - Complete Photo Guide To Home Repair & ImprovementDocument555 pagesThe Book of Home How-To - Complete Photo Guide To Home Repair & ImprovementAmmad Ahmad100% (2)
- Planting Plans For Your Kitchen Garden - How To Create A Vegetable, Herb and Fruit Garden in Easy Stages PDFDocument356 pagesPlanting Plans For Your Kitchen Garden - How To Create A Vegetable, Herb and Fruit Garden in Easy Stages PDFGiampaolo Pastorino100% (2)
- Black & Decker Custom Grills & Smokers Build Your Own Backyard Cooking & Tailgating Equipment PDFDocument178 pagesBlack & Decker Custom Grills & Smokers Build Your Own Backyard Cooking & Tailgating Equipment PDFTab101 Woking100% (3)
- Black & Decker PDFDocument547 pagesBlack & Decker PDFXax Xax Xax100% (3)
- The Complete Guide To Garages - Design, Build, Remodel & Maintain Your GarageDocument243 pagesThe Complete Guide To Garages - Design, Build, Remodel & Maintain Your GarageAmmad AhmadNo ratings yet
- The Complete Guide To Outdoor Carpentry - Complete Plans For Beautiful Backyard Building ProjectsDocument211 pagesThe Complete Guide To Outdoor Carpentry - Complete Plans For Beautiful Backyard Building ProjectsAmmad Ahmad100% (2)
- A Brief Introduction To Myth and Archetypal CriticismDocument3 pagesA Brief Introduction To Myth and Archetypal Criticismafacean100% (2)
- Syllabus For 11thDocument3 pagesSyllabus For 11thirfannoble100% (1)
- The Art of ParagraphingDocument8 pagesThe Art of ParagraphingGloria Ngeri Dan-OrawariNo ratings yet
- Landler Kuffner PDFDocument1 pageLandler Kuffner PDFPrashanthNo ratings yet
- Industrial Buses Super Basic IntroDocument153 pagesIndustrial Buses Super Basic Introvasanth_erNo ratings yet
- Curriculum Vitae: Tubagus G.PDocument3 pagesCurriculum Vitae: Tubagus G.PTB Gita PriadiNo ratings yet
- OOC NotesDocument61 pagesOOC NoteschayashreeNo ratings yet
- Excellent Comprehension and 93% on English Knowledge TestDocument7 pagesExcellent Comprehension and 93% on English Knowledge TestYeimmy Julieth Cardenas MillanNo ratings yet
- Detailed Content Sem 1 PDFDocument13 pagesDetailed Content Sem 1 PDFAbhishekAnandNo ratings yet
- Questões EPCAR - Simulado 1Document5 pagesQuestões EPCAR - Simulado 1meusgatos2024No ratings yet
- Aqa 8702 Worlds and Lives Poetry Cluster TGDocument24 pagesAqa 8702 Worlds and Lives Poetry Cluster TGlucy baikNo ratings yet
- Router ManualDocument244 pagesRouter ManualSatish GaikwadNo ratings yet
- Harper and de Jong Misconceptions About Teaching ELLsDocument11 pagesHarper and de Jong Misconceptions About Teaching ELLsAdriana Onofrei100% (1)
- Learn the Present Continuous TenseDocument8 pagesLearn the Present Continuous TenseDo Huynh Khiem CT20V1Q531No ratings yet
- Manual Operation (AT150A)Document23 pagesManual Operation (AT150A)Candra Guantama83% (6)
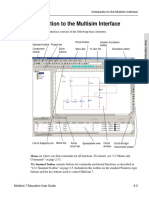
- Multisim InterfaceDocument10 pagesMultisim InterfaceZwe Zan LynnNo ratings yet
- LogDocument23 pagesLogGoya TinderaNo ratings yet
- Kertas Kerja InternshipDocument6 pagesKertas Kerja InternshipBibie MaureenaNo ratings yet
- Let's GO 3Document86 pagesLet's GO 3dxvx1230No ratings yet
- SDS Expense TrackerDocument13 pagesSDS Expense TrackermekidesNo ratings yet
- Computer Shortcut Keys ListDocument6 pagesComputer Shortcut Keys ListArslan ShahidNo ratings yet
- Annex-A.1.1-List of ICT Equipment, Goods, Support Services and Consulting ServicesDocument5 pagesAnnex-A.1.1-List of ICT Equipment, Goods, Support Services and Consulting ServicesBee BlancNo ratings yet
- Wuolah Free Katherine Mansfield BlissDocument17 pagesWuolah Free Katherine Mansfield Blissinmaculadaferia23No ratings yet
- Summer Task 4Document8 pagesSummer Task 4Jayy ZeeNo ratings yet
- The Greatest Problem - 2nd BookletDocument46 pagesThe Greatest Problem - 2nd Bookletcaroline.mamdouhNo ratings yet
- (Cambridge Elements. Elements in The Philosophy of Religion) Elliott Sober - The Design Argument (2019, Cambridge University Press)Document94 pages(Cambridge Elements. Elements in The Philosophy of Religion) Elliott Sober - The Design Argument (2019, Cambridge University Press)Marcelo Monteiro0% (1)
- Q2 AnsDocument121 pagesQ2 AnsNatalieNo ratings yet
- J.S. Bach's 6 Cello SuitesDocument1 pageJ.S. Bach's 6 Cello SuitesZachary HarriottNo ratings yet
- Physical Count Report of School PropertyDocument24 pagesPhysical Count Report of School PropertyLiz Rabaya IntiaNo ratings yet
- Speedtest Oleh Ookla - Uji Kecepatan Broadband GlobalDocument9 pagesSpeedtest Oleh Ookla - Uji Kecepatan Broadband GlobalFranky SetionoNo ratings yet