You might also like
- M303, Fluid MEchanics FM - M III P.P. Binu & Sunand CDocument21 pagesM303, Fluid MEchanics FM - M III P.P. Binu & Sunand CPremjith SugunanNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Thermo Cycles 2Document16 pagesThermo Cycles 2cobalt boronNo ratings yet
- Heat Transfer Example ProblemsDocument8 pagesHeat Transfer Example ProblemsNick PapavizasNo ratings yet
- Api 510, Pressure Vessel Inspector Certification ExaminationDocument62 pagesApi 510, Pressure Vessel Inspector Certification ExaminationIrinaNo ratings yet
- Electrical Wiring DiagramDocument46 pagesElectrical Wiring DiagramTùng Phạm xuânNo ratings yet
- Ex. No 1) Thermal Conductivity of Metal RodDocument8 pagesEx. No 1) Thermal Conductivity of Metal RodGaurav Sonawane0% (1)
- Setup and Hold Time CalculationsDocument33 pagesSetup and Hold Time CalculationsRashmi Periwal100% (11)
- Combined Convection and Radiation Report - OdtDocument9 pagesCombined Convection and Radiation Report - OdtPasindu MalithNo ratings yet
- Science Quarter 4 ReviewerDocument8 pagesScience Quarter 4 Reviewercali anna75% (4)
- QUBE-Servo DC Motor ModelingDocument5 pagesQUBE-Servo DC Motor Modelingandres guerreroNo ratings yet
- Thermal Energy Storage - Exercises 2022-2023Document32 pagesThermal Energy Storage - Exercises 2022-2023Michiel WalNo ratings yet
- Plinske Turbine 2015Document13 pagesPlinske Turbine 2015Aleksandar NikolićNo ratings yet
- Diesel CycleDocument18 pagesDiesel CycleJustino BalaneNo ratings yet
- First Law 2Document9 pagesFirst Law 2Mihai MirceaNo ratings yet
- 9 SolutionsDocument6 pages9 SolutionsKathleen HalwachsNo ratings yet
- Analog Communication - AM ModulatorsDocument5 pagesAnalog Communication - AM ModulatorsB.Prashant JhaNo ratings yet
- PC Previous ExamsDocument2 pagesPC Previous ExamsAbse Ps4No ratings yet
- 446-02 Mdls of Sys I (N) - HandoutDocument9 pages446-02 Mdls of Sys I (N) - HandoutFrancisco HurtadoNo ratings yet
- Brayton CycleDocument9 pagesBrayton CycleJustino BalaneNo ratings yet
- EMG2410 Tutorial1Document2 pagesEMG2410 Tutorial1DECENT DECENT MUSINAINo ratings yet
- Heat Transfer - SolutionDocument27 pagesHeat Transfer - SolutionNeeleshNo ratings yet
- 04 - Thermodynamic - Cycles - (Joule - B) PDFDocument8 pages04 - Thermodynamic - Cycles - (Joule - B) PDFAntonio Di FioreNo ratings yet
- Module 4 NotesDocument19 pagesModule 4 Notesgayatrigopalakrishna100% (1)
- M3. Velocity Control For DC Servo MotorsDocument20 pagesM3. Velocity Control For DC Servo Motors21146424No ratings yet
- Synthetic Unit HydrographDocument9 pagesSynthetic Unit HydrographTrisha Gaile MoscosoNo ratings yet
- EC05032!Notes 8 PDFDocument2 pagesEC05032!Notes 8 PDFms_aramanaNo ratings yet
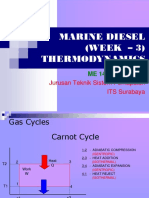
- Marine Diesel (WEEK - 3) Thermodynamics: Jurusan Teknik Sistem Perkapalan ITS SurabayaDocument38 pagesMarine Diesel (WEEK - 3) Thermodynamics: Jurusan Teknik Sistem Perkapalan ITS SurabayafaridNo ratings yet
- Principle of TurbomachineryDocument159 pagesPrinciple of TurbomachineryWalid MohammedNo ratings yet
- 1.) (I) Explain The Principle of Cascade Control IndicatingDocument7 pages1.) (I) Explain The Principle of Cascade Control IndicatingmutencoNo ratings yet
- Ch.8 - Exhaust Flow Elements and ProblemsDocument1 pageCh.8 - Exhaust Flow Elements and ProblemsJohn Joseph AmoresNo ratings yet
- Experiment 06Document4 pagesExperiment 06DikshitNo ratings yet
- Heat Transfer. Exchangers Design. Effectivness and Number of Transfer Units NTUDocument70 pagesHeat Transfer. Exchangers Design. Effectivness and Number of Transfer Units NTUHenry WicaksanaNo ratings yet
- Exercise - Optimisation Past Year ExamDocument2 pagesExercise - Optimisation Past Year ExamAmirul AfiqNo ratings yet
- Try MeDocument9 pagesTry MeKrizzete HernandezNo ratings yet
- Chemical Exergy CalculationDocument7 pagesChemical Exergy CalculationmaheshNo ratings yet
- PMS Experiment 7 - CSTR Openloop-1Document6 pagesPMS Experiment 7 - CSTR Openloop-1815 PAVANNo ratings yet
- C mc ε NTU: Visit us at: www.nodia.co.inDocument1 pageC mc ε NTU: Visit us at: www.nodia.co.inSameerChauhanNo ratings yet
- Tut 1Document2 pagesTut 1DECENT DECENT MUSINAINo ratings yet
- Analog Communication AM ModulatorsDocument3 pagesAnalog Communication AM ModulatorsGOHIL AJAYKUMAR SHANKARBHAINo ratings yet
- TRIAL ON Vortex TubeDocument7 pagesTRIAL ON Vortex Tubevyankatesh visputeNo ratings yet
- Program For Simulation of A Continuous Stirred Tank Reactor in Matlab'S GuiDocument6 pagesProgram For Simulation of A Continuous Stirred Tank Reactor in Matlab'S GuiFathurRahmanNo ratings yet
- Solutions To Problem Set 5Document6 pagesSolutions To Problem Set 5rc gautamNo ratings yet
- Proposal ExampleDocument4 pagesProposal ExampleEce YağmurNo ratings yet
- Forced ConvectionDocument9 pagesForced Convectionommech2020No ratings yet
- DCS 01 (Dcspeed)Document16 pagesDCS 01 (Dcspeed)K PranavNo ratings yet
- Respuestas 235.Document4 pagesRespuestas 235.blancanestor76No ratings yet
- Experiment-3 Heat Transfer in Agitated Vessel: Sarthak Lathiya Hto Lab 18BT01035Document10 pagesExperiment-3 Heat Transfer in Agitated Vessel: Sarthak Lathiya Hto Lab 18BT01035SARTHAK LATHIYANo ratings yet
- D.K.Pandey: Acceleration Due To Gravity G' by Kater's PendulumDocument2 pagesD.K.Pandey: Acceleration Due To Gravity G' by Kater's PendulumPrashantNo ratings yet
- Assignment One Regular AAIT 2022Document6 pagesAssignment One Regular AAIT 2022tsegaye2321No ratings yet
- Three: Solving The Energy Balance Equation (TC "Solving The Energy Balance Equation" /L 1)Document14 pagesThree: Solving The Energy Balance Equation (TC "Solving The Energy Balance Equation" /L 1)Nguyễn Văn HiếuNo ratings yet
- Optimization of A Steam Boiler PDFDocument8 pagesOptimization of A Steam Boiler PDFSyifaprilia N0% (1)
- Lecture 01Document30 pagesLecture 01Diane ClaireNo ratings yet
- Tugas 2 Siskon FIXDocument4 pagesTugas 2 Siskon FIXShabirin Amin TNo ratings yet
- bài báo cáo httd cuối kìDocument7 pagesbài báo cáo httd cuối kìHoàng TháiNo ratings yet
- Control Systems Engineering D227 S.A.E. Solutions Tutorial 4 - System Response Self Assessment Exercise No.1Document3 pagesControl Systems Engineering D227 S.A.E. Solutions Tutorial 4 - System Response Self Assessment Exercise No.1cataiceNo ratings yet
- RC Circuits and Applications: Lab Ticket and Write-Up CommentsDocument12 pagesRC Circuits and Applications: Lab Ticket and Write-Up CommentsSatyajit MoreNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Doble - Symmetrical Type Phase Shifting Transformers Basic Relay Protection PDFDocument25 pagesDoble - Symmetrical Type Phase Shifting Transformers Basic Relay Protection PDFsulemankhalidNo ratings yet
- VRF AUTOMATIC PUMP DOWN PACKAGE APPLICATIONS MANUAL Issue 7 080817 SmallDocument60 pagesVRF AUTOMATIC PUMP DOWN PACKAGE APPLICATIONS MANUAL Issue 7 080817 SmallAlyoom NewsNo ratings yet
- Chart Recorder Operation & TroubleshootingDocument3 pagesChart Recorder Operation & TroubleshootingJhon JJNo ratings yet
- LoadingDocument29 pagesLoadingtumbNo ratings yet
- Diffusion Grilles: Imos-Vdq Technical ConditionsDocument7 pagesDiffusion Grilles: Imos-Vdq Technical ConditionsKundzoNo ratings yet
- Spray Angle Variation of Liquid-Liquid Swirl Coaxial InjectorsDocument8 pagesSpray Angle Variation of Liquid-Liquid Swirl Coaxial InjectorsAlireza RamezaniNo ratings yet
- Physical Properties of SoilDocument3 pagesPhysical Properties of SoilCESHNo ratings yet
- Cat - Qa 09 - TSD-3Document34 pagesCat - Qa 09 - TSD-3Deepankar Sadhan Banik100% (1)
- Chapter 2 NumericalsDocument36 pagesChapter 2 NumericalsAASHISH KATUWALNo ratings yet
- CIE PhysicsDocument14 pagesCIE PhysicsengrroyNo ratings yet
- Seminar Kimia SPM Mmu 2017 CG Adura Jawapan Kertas 2 PDFDocument48 pagesSeminar Kimia SPM Mmu 2017 CG Adura Jawapan Kertas 2 PDFNoorleha Mohd YusoffNo ratings yet
- Module 2 2QDocument24 pagesModule 2 2Qchef curryNo ratings yet
- BST (Unit 4&5)Document22 pagesBST (Unit 4&5)sheeladeepakNo ratings yet
- 6-Air Receiver CALCULATIONDocument3 pages6-Air Receiver CALCULATIONAhmed AymanNo ratings yet
- Fluids and Their Motion: The State of A FluidDocument25 pagesFluids and Their Motion: The State of A FluidNOVENO SEMESTRENo ratings yet
- TYPE CRT3000 - CRT22500: Description ApplicationsDocument2 pagesTYPE CRT3000 - CRT22500: Description ApplicationscindyNo ratings yet
- Go Borrow VesselDocument8 pagesGo Borrow VesselDave UlanNo ratings yet
- Load Curve: Importance of Load Curve, Demand Factor, Load FactorDocument7 pagesLoad Curve: Importance of Load Curve, Demand Factor, Load Factorryan hardiantoNo ratings yet
- 4 Important Methods of Ground Resistance TestingDocument5 pages4 Important Methods of Ground Resistance TestingAbdul Mohid SheikhNo ratings yet
- fqp9n25c fqpf9n25ct Fqpf9n25cydtuDocument10 pagesfqp9n25c fqpf9n25ct Fqpf9n25cydtuEsther AsturiasNo ratings yet
- Chemistry Practical Salt Analysis and Volumetric Analysis Class 12Document20 pagesChemistry Practical Salt Analysis and Volumetric Analysis Class 12Science RetroNo ratings yet
- PDFenDocument77 pagesPDFenAravindan Ganapathi subramanianNo ratings yet
- Chemistry: Unit I. Chemistry and Us Factual KnowledgeDocument31 pagesChemistry: Unit I. Chemistry and Us Factual KnowledgeMARICEL MIRANDANo ratings yet
- Soal Latihan Penurunan PondasiDocument24 pagesSoal Latihan Penurunan PondasiKeluarga NainggolanNo ratings yet
- Colimador Manual CompleteDocument78 pagesColimador Manual CompleteLuis Alberto Díaz OlmedoNo ratings yet
- Basics of Ultrasonic Flow MetersDocument18 pagesBasics of Ultrasonic Flow MetersMiroslav IlićNo ratings yet