You might also like
- Hydrogen Power Energy HHO Generators PDFDocument70 pagesHydrogen Power Energy HHO Generators PDFKiran Rangineni100% (4)
- Mutliphase Summary 3Document49 pagesMutliphase Summary 3Slim KanounNo ratings yet
- Research (Edible Cutlery)Document9 pagesResearch (Edible Cutlery)Reylsea MayNo ratings yet
- Concrete Material and MixtureDocument51 pagesConcrete Material and MixtureAina Aqilah100% (1)
- Elmod6 Guide PDFDocument147 pagesElmod6 Guide PDFslavijasrb3No ratings yet
- Best Practices For Modeling Multi Phase Flows in Automotive IndustryDocument55 pagesBest Practices For Modeling Multi Phase Flows in Automotive Industryamir_chemeng100% (1)
- Final Project Report Natural CoagulationDocument48 pagesFinal Project Report Natural CoagulationSareeg Thomas0% (1)
- Spent Caustic Treatment Options-Saudi AramcoDocument20 pagesSpent Caustic Treatment Options-Saudi Aramcoonizuka-t22630% (1)
- Flexible Pavement Design SummaryDocument7 pagesFlexible Pavement Design SummarysafeccivilNo ratings yet
- Spe 25890 Pa PDFDocument12 pagesSpe 25890 Pa PDForeNo ratings yet
- Colligative Properties of SolutionsDocument11 pagesColligative Properties of SolutionsNelsonMoseM100% (1)
- Aerospace Material Specification: Nickel Plating (Electrodeposited)Document12 pagesAerospace Material Specification: Nickel Plating (Electrodeposited)BHUSHAN100% (2)
- Multiphase Flow and Fluidization: Continuum and Kinetic Theory DescriptionsFrom EverandMultiphase Flow and Fluidization: Continuum and Kinetic Theory DescriptionsRating: 5 out of 5 stars5/5 (1)
- Kenpave PDFDocument14 pagesKenpave PDFEngr Nissar KakarNo ratings yet
- PuneDocument564 pagesPuneANSHUMANNo ratings yet
- Creating Paper From Pineapple Leaves and Corn HuskDocument6 pagesCreating Paper From Pineapple Leaves and Corn HuskAllen LuisNo ratings yet
- Service Manual: CB 18S CB 27S CB 37SDocument85 pagesService Manual: CB 18S CB 27S CB 37SMack DieselNo ratings yet
- Glass Production: From Wikipedia, The Free EncyclopediaDocument10 pagesGlass Production: From Wikipedia, The Free EncyclopediaMahfuzur Rahman SiddikyNo ratings yet
- LapoujadeDocument10 pagesLapoujadehrr.cv7No ratings yet
- Effect of Interlayer Properties On AC Airfield Pavements Main ResponsesDocument15 pagesEffect of Interlayer Properties On AC Airfield Pavements Main ResponsesJohann CárdenasNo ratings yet
- Finite Element Based Simulation of Dry Sliding WearDocument20 pagesFinite Element Based Simulation of Dry Sliding WearwondwosenAyeleNo ratings yet
- Comparison of Flexible Pavement PerformaDocument8 pagesComparison of Flexible Pavement PerformaHeriberto CastañedaNo ratings yet
- High-Performance Abaqus Simulations in Soil Mechanics: H.M. Hügel, S. Henke, S. KinzlerDocument15 pagesHigh-Performance Abaqus Simulations in Soil Mechanics: H.M. Hügel, S. Henke, S. Kinzlerabubaker ahmedNo ratings yet
- JCSS Workshop On Semi-Probabilistic FEM Calculations: - Load and Material ModelsDocument5 pagesJCSS Workshop On Semi-Probabilistic FEM Calculations: - Load and Material Modelsmocker1987No ratings yet
- Use of Computational Fluid Dynamics in Civil EngineeringDocument14 pagesUse of Computational Fluid Dynamics in Civil EngineeringAnonymous TqP3LLNuuNo ratings yet
- Comparison of Flexible Pavement Performance Using Kenlayer and Chev PC Software ProgramDocument9 pagesComparison of Flexible Pavement Performance Using Kenlayer and Chev PC Software ProgramAnteneh GeremewNo ratings yet
- Dahmani PortugalDocument11 pagesDahmani PortugalhiimrujuNo ratings yet
- 11 22 Emperical and Mechanistic Pavement Design 2Document55 pages11 22 Emperical and Mechanistic Pavement Design 2Shams KhattakNo ratings yet
- Review of The Shear-Stress Transport Turbulence Model Experience From An Industrial PerspectiveDocument13 pagesReview of The Shear-Stress Transport Turbulence Model Experience From An Industrial PerspectiveVyssionNo ratings yet
- Detailed Mathematical Modelling of Membrane ModulesDocument8 pagesDetailed Mathematical Modelling of Membrane Modulesrocksoad23No ratings yet
- Computational Fluid Dynamics Technology For Hypersonic ApplicationsDocument12 pagesComputational Fluid Dynamics Technology For Hypersonic ApplicationsSãröj ShâhNo ratings yet
- Evaluation of The Turbulent Models For The Simulation of The Flow Over A NACA 0012 AirfoilDocument44 pagesEvaluation of The Turbulent Models For The Simulation of The Flow Over A NACA 0012 AirfoilAmir KhanNo ratings yet
- 2 Design FactorsDocument7 pages2 Design FactorsshurookNo ratings yet
- Introduction PDFDocument30 pagesIntroduction PDFabimanaNo ratings yet
- Identification of Parameters and Fatigue Life AsseDocument14 pagesIdentification of Parameters and Fatigue Life AsseSidhuRamNo ratings yet
- Lecture 3 Mechanistic-Empirical Pavement DesingDocument61 pagesLecture 3 Mechanistic-Empirical Pavement DesingTadesse MegersaNo ratings yet
- Star CCM+: 3D-CAD ModelerDocument4 pagesStar CCM+: 3D-CAD ModelerlukhmanNo ratings yet
- D 5858 - 96 Rdu4ntgtotzfmqDocument7 pagesD 5858 - 96 Rdu4ntgtotzfmqaskarah100% (1)
- AnsysDocument9 pagesAnsysThe Guntech GamingNo ratings yet
- Fatigue Life Calculation of Monopiles For Offshore Wind Turbines Using A Kinematic Hardening Soil ModelDocument6 pagesFatigue Life Calculation of Monopiles For Offshore Wind Turbines Using A Kinematic Hardening Soil ModelErnest Onoriode OshogbunuNo ratings yet
- ANSYS Explicit Dynamics - Ashish JaiswalDocument57 pagesANSYS Explicit Dynamics - Ashish JaiswalPeriNumerics100% (1)
- Pavement Components 2Document61 pagesPavement Components 2Md. Shofiul IslamNo ratings yet
- Atmospheric Environment Volume 38 Issue 28 2004 (Doi 10.1016 - J.atmosenv.2004.05.041) Steven R Hanna Olav R Hansen Seshu Dharmavaram - FLACS CDocument13 pagesAtmospheric Environment Volume 38 Issue 28 2004 (Doi 10.1016 - J.atmosenv.2004.05.041) Steven R Hanna Olav R Hansen Seshu Dharmavaram - FLACS Cigor VladimirovichNo ratings yet
- FTDDocument188 pagesFTDsharath1199No ratings yet
- Annual Review of Fluid Mechanics 2009 SpalartDocument24 pagesAnnual Review of Fluid Mechanics 2009 SpalartJamie RatnakaranNo ratings yet
- CFD (Introduction)Document46 pagesCFD (Introduction)murad_ashourNo ratings yet
- 2001 MenterDocument11 pages2001 Mentercjunior_132No ratings yet
- A Strong Coupling Partitioned Approach FDocument15 pagesA Strong Coupling Partitioned Approach FHayderAlSamawiNo ratings yet
- CFD Lab Manual PK Final PDFDocument55 pagesCFD Lab Manual PK Final PDFYBSV PRASADNo ratings yet
- Modeling of Flow and Transport in Enhanced Geothermal SystemsDocument8 pagesModeling of Flow and Transport in Enhanced Geothermal SystemsLuca GuglielmettiNo ratings yet
- Scanlon TJ & Taylor IJ - Strathprints - Practical Application of CFD For Wind Loading On Tall Buildings 18 Nov 09Document9 pagesScanlon TJ & Taylor IJ - Strathprints - Practical Application of CFD For Wind Loading On Tall Buildings 18 Nov 09Prasanna AbeysekaraNo ratings yet
- Advances in Engineering Software: A. El Ayadi, B. Picoux, G. Lefeuve-Mesgouez, A. Mesgouez, C. PetitDocument10 pagesAdvances in Engineering Software: A. El Ayadi, B. Picoux, G. Lefeuve-Mesgouez, A. Mesgouez, C. Petitvinod choudhariNo ratings yet
- CIGRE-135 Fluid Structure Interaction Methods in Prevention of Transformer ExplosionDocument8 pagesCIGRE-135 Fluid Structure Interaction Methods in Prevention of Transformer ExplosionkamuikNo ratings yet
- Stresses and Strains in Flexible Pavemen PDFDocument116 pagesStresses and Strains in Flexible Pavemen PDFYerko eterovicNo ratings yet
- Malley ResponseSpectrumAnaly PDFDocument14 pagesMalley ResponseSpectrumAnaly PDFNero PereraNo ratings yet
- Summary Models of Paved Road Deterioration Based On HDM-111Document7 pagesSummary Models of Paved Road Deterioration Based On HDM-111SiegfriedNo ratings yet
- FEA ApplicationsDocument7 pagesFEA ApplicationsMuaz AliNo ratings yet
- Assignment Quiz PDFDocument7 pagesAssignment Quiz PDFChristine Ann BasbasNo ratings yet
- Stresses and Strains in Flexible PavemenDocument116 pagesStresses and Strains in Flexible Pavemenحسين الشهريNo ratings yet
- CFD Prediction of Cooling Tower DriftDocument35 pagesCFD Prediction of Cooling Tower DriftberanoshNo ratings yet
- Analytical-Empirical Pavement Evaluation Using The FWD PDFDocument9 pagesAnalytical-Empirical Pavement Evaluation Using The FWD PDFGang Liu100% (1)
- 3D Modeling of Urban Areas For Built Environment CFD Applications Using ComsolDocument7 pages3D Modeling of Urban Areas For Built Environment CFD Applications Using ComsolsreejuslNo ratings yet
- Fatigue of Grouted Joint ConnectionsDocument5 pagesFatigue of Grouted Joint Connectionsscrane@No ratings yet
- F2D414Document194 pagesF2D414DidaBouchNo ratings yet
- Determination of Shock Losses and Pressure Losses in UG Mine OpeningsDocument74 pagesDetermination of Shock Losses and Pressure Losses in UG Mine OpeningsSantanu kumar AichNo ratings yet
- The Use of Adaptive Finite-Element Limit Analysis To Reveal Slip LineDocument7 pagesThe Use of Adaptive Finite-Element Limit Analysis To Reveal Slip LineSam HuckleNo ratings yet
- Seismic Safety Evaluation of Concrete Dams: A Nonlinear Behavioral ApproachFrom EverandSeismic Safety Evaluation of Concrete Dams: A Nonlinear Behavioral ApproachNo ratings yet
- High Performance Computing and the Discrete Element Model: Opportunity and ChallengeFrom EverandHigh Performance Computing and the Discrete Element Model: Opportunity and ChallengeNo ratings yet
- Sanjary Bazar Electric PlanDocument1 pageSanjary Bazar Electric PlanKamaluddin KamalNo ratings yet
- Att 5 Life Health Safety LetterDocument2 pagesAtt 5 Life Health Safety LetterKamaluddin KamalNo ratings yet
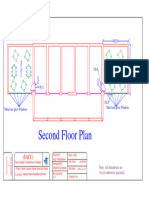
- Second Floor PlanDocument1 pageSecond Floor PlanKamaluddin KamalNo ratings yet
- Asgn#4 (SOM)Document2 pagesAsgn#4 (SOM)Kamaluddin KamalNo ratings yet
- Foundation PlanDocument1 pageFoundation PlanKamaluddin KamalNo ratings yet
- Attch 4 - AF 66 - RTE LaliqueDocument1 pageAttch 4 - AF 66 - RTE LaliqueKamaluddin KamalNo ratings yet
- Att 1 SOW - RCSW-11-076b PSP RLC Ammo Supply PointDocument10 pagesAtt 1 SOW - RCSW-11-076b PSP RLC Ammo Supply PointKamaluddin KamalNo ratings yet
- Effect of Rejuvenator Types and Mixing Procedures On VolumetricDocument8 pagesEffect of Rejuvenator Types and Mixing Procedures On VolumetricKamaluddin KamalNo ratings yet
- Att 3 Chain Link Fence-Gate DrawingsDocument3 pagesAtt 3 Chain Link Fence-Gate DrawingsKamaluddin KamalNo ratings yet
- 1 s2.0 S0950061811003242 MainDocument8 pages1 s2.0 S0950061811003242 MainKamaluddin KamalNo ratings yet
- Review Paper TimelineDocument2 pagesReview Paper TimelineKamaluddin KamalNo ratings yet
- Experiment 01Document1 pageExperiment 01Kamaluddin KamalNo ratings yet
- Review Flow ChartDocument1 pageReview Flow ChartKamaluddin KamalNo ratings yet
- Experiment 04Document3 pagesExperiment 04Kamaluddin KamalNo ratings yet
- Attachment For Q3 in Assignment #3 DSR Test Procedure (AASHTO T 315)Document10 pagesAttachment For Q3 in Assignment #3 DSR Test Procedure (AASHTO T 315)Kamaluddin KamalNo ratings yet
- Effects of Rejuvenating Agents On Superpave Mixtures Containing Reclaimed Asphalt PavementDocument9 pagesEffects of Rejuvenating Agents On Superpave Mixtures Containing Reclaimed Asphalt PavementKamaluddin KamalNo ratings yet
- Experiment Sheet (HPM)Document1 pageExperiment Sheet (HPM)Kamaluddin KamalNo ratings yet
- Exam 2013 Questions Examination 2Document8 pagesExam 2013 Questions Examination 2Kamaluddin KamalNo ratings yet
- 3SnF@ 12Document1 page3SnF@ 12Kamaluddin KamalNo ratings yet
- Experimental Study of Recycled Asphalt Concrete Modified by High-Modulus AgentDocument9 pagesExperimental Study of Recycled Asphalt Concrete Modified by High-Modulus AgentKamaluddin KamalNo ratings yet
- Moisture Damage Evaluation of Asphalt Mixtures Using AASHTO T283 and DC (T) Fracture TestDocument13 pagesMoisture Damage Evaluation of Asphalt Mixtures Using AASHTO T283 and DC (T) Fracture TestKamaluddin KamalNo ratings yet
- NCHRP09-33 HMATools 6 1 Draft FinalDocument186 pagesNCHRP09-33 HMATools 6 1 Draft FinalKamaluddin KamalNo ratings yet
- Hardtop XP Alu: Technical Data SheetDocument5 pagesHardtop XP Alu: Technical Data SheetAfrizal Albar RamadhanNo ratings yet
- Steel Angles D 1322Document2 pagesSteel Angles D 1322Shanmuga SundaramNo ratings yet
- Department of Environment and Natural Resources Environmental Management BureauDocument22 pagesDepartment of Environment and Natural Resources Environmental Management BureauGaisano Capital Tacloban MainNo ratings yet
- N2XH FE 180/E: Controls, IncDocument2 pagesN2XH FE 180/E: Controls, IncShoaib-Ur -RehmanNo ratings yet
- Transmission Towers & Lines: Download Brochure PDFDocument2 pagesTransmission Towers & Lines: Download Brochure PDFGhayas Ud-din DarNo ratings yet
- Parts, Adhesives and SealantsDocument44 pagesParts, Adhesives and SealantsClaris BaylenNo ratings yet
- 100mm (4") BOREWELL Submersible Pumpsets: Genie SeriesDocument3 pages100mm (4") BOREWELL Submersible Pumpsets: Genie SeriesPazhamalairajan KaliyaperumalNo ratings yet
- ST014 Sod - MetasilicateDocument1 pageST014 Sod - MetasilicateAreIf Cron BmxStreetNo ratings yet
- ACE Hammer CatalogueDocument8 pagesACE Hammer CatalogueAgung NgurahNo ratings yet
- HC15 Manual PDFDocument24 pagesHC15 Manual PDFnstefosNo ratings yet
- Effects of Alloying Elements On SteelDocument2 pagesEffects of Alloying Elements On SteelKISHORNo ratings yet
- Level 3 Post Emulsifiable Fluorescent Penetrant: Product Data SheetDocument2 pagesLevel 3 Post Emulsifiable Fluorescent Penetrant: Product Data SheetAnand AmanNo ratings yet
- CM P1 11643 en SKF Microlog Accessories CatalogDocument100 pagesCM P1 11643 en SKF Microlog Accessories CatalogJeffersonDeOliveiraFerreiraNo ratings yet
- Aqua Mats 2005 SDFspecsheet R6Document1 pageAqua Mats 2005 SDFspecsheet R6indomie11No ratings yet
- H4 Pipe Friction GroupDocument31 pagesH4 Pipe Friction GroupYash PersÌeNo ratings yet
- Mobile Charging Using Nano GeneratorDocument4 pagesMobile Charging Using Nano GeneratorPriscilla JenniferNo ratings yet
- Pyrolysis Presentation - PPTM (Autosaved) .PPTMDocument13 pagesPyrolysis Presentation - PPTM (Autosaved) .PPTMSoul LyricsNo ratings yet
- ACI 363r 92 State of The Art Report On HDocument55 pagesACI 363r 92 State of The Art Report On Hosama anterNo ratings yet
- API 600 Trim No.Document19 pagesAPI 600 Trim No.SUBHASISH BHATTACHARYYANo ratings yet