You might also like
- Chapter 1-Digital Locgic FloyedDocument4 pagesChapter 1-Digital Locgic FloyedmigadNo ratings yet
- Lecture Notes Digital Logic and Design (DLD) : Dr. Tahira ShujahDocument7 pagesLecture Notes Digital Logic and Design (DLD) : Dr. Tahira Shujahprince12No ratings yet
- Introduction and Basics: Course Instructor: Aisha DanishDocument30 pagesIntroduction and Basics: Course Instructor: Aisha DanishrizwanNo ratings yet
- 1physical LayerDocument61 pages1physical Layergokul adethyaNo ratings yet
- Digital Concepts: 1.1 Definition of An Analogue QuantityDocument6 pagesDigital Concepts: 1.1 Definition of An Analogue QuantityKiran DNo ratings yet
- Chapter 1Document23 pagesChapter 1Nurul Ashikin Binti Abdul MajidNo ratings yet
- Capter 1Document38 pagesCapter 1Gatluak Thalow KuethNo ratings yet
- Chapter 1 Part 1 - 130912 - 0Document56 pagesChapter 1 Part 1 - 130912 - 0AmriNo ratings yet
- DLDChapter 1Document26 pagesDLDChapter 1PRINCE TeddyNo ratings yet
- 01 IntroductionDocument21 pages01 IntroductionElsteffen GunawanNo ratings yet
- 001 Digital 315 SlidDocument327 pages001 Digital 315 SlidshivamsinghsolankiNo ratings yet
- DLD Lecture1 - Introductory ConceptsDocument45 pagesDLD Lecture1 - Introductory ConceptsHoorain SajjadNo ratings yet
- Pink Floyd Ch.1Document28 pagesPink Floyd Ch.1Abdullah AftabNo ratings yet
- Lecture 02-Physical Layer-Transmission Terminology-1920Document80 pagesLecture 02-Physical Layer-Transmission Terminology-1920Arvin 97No ratings yet
- DLD 2022 1Document32 pagesDLD 2022 1Yasir AliNo ratings yet
- Chapter 1Document11 pagesChapter 1Izzah AmaniNo ratings yet
- Digital Waveform:: Rising Edge Falling Edge Edge Non-Ideal PulsesDocument19 pagesDigital Waveform:: Rising Edge Falling Edge Edge Non-Ideal PulsestaylorNo ratings yet
- LEC#1Document76 pagesLEC#1Manish KumarNo ratings yet
- Digital Electronics Lecture 1 - Introduction: Kwame Oteng Gyasi 0544478819Document19 pagesDigital Electronics Lecture 1 - Introduction: Kwame Oteng Gyasi 0544478819Operation ResearchNo ratings yet
- Unit2 6Document74 pagesUnit2 6PeterNo ratings yet
- Linear Wave ShapingDocument32 pagesLinear Wave ShapingArun Kumar DhupamNo ratings yet
- Data Transmission CH 2Document71 pagesData Transmission CH 2Prïñčé Äl ŜåmádNo ratings yet
- Analog Digital Chap3Document50 pagesAnalog Digital Chap3NirmalNo ratings yet
- CSP Unit 1 MaterialDocument28 pagesCSP Unit 1 MaterialP.V.S. VEERANJANEYULUNo ratings yet
- Information Sources & Signals: CECS 474 Computer Network InteroperabilityDocument20 pagesInformation Sources & Signals: CECS 474 Computer Network InteroperabilityJuan UrdanettNo ratings yet
- For Sync Class - Module 5 - 3TSY2223Document45 pagesFor Sync Class - Module 5 - 3TSY2223teodoro kubaronNo ratings yet
- CIS-111: Digital Logic Design: by Dr. Javaid Khurshid Dcis, PieasDocument38 pagesCIS-111: Digital Logic Design: by Dr. Javaid Khurshid Dcis, PieasAbdul RafayNo ratings yet
- Linear Wave ShapingDocument71 pagesLinear Wave ShapingArun Kumar DhupamNo ratings yet
- DLD AP (Autosaved)Document28 pagesDLD AP (Autosaved)saarimbangladeshNo ratings yet
- Lecture 1Document34 pagesLecture 1Htet ZawNo ratings yet
- Analog & Digital SignalsDocument15 pagesAnalog & Digital SignalsNouman MemonNo ratings yet
- Lec - A-03 - Introduction To Digital Logic and Boolean Algebra 1920Document112 pagesLec - A-03 - Introduction To Digital Logic and Boolean Algebra 1920hbfagfjafasebaNo ratings yet
- L1 DLD Introduction To DLDDocument25 pagesL1 DLD Introduction To DLDandreytagnoNo ratings yet
- Komunikasi Data 5Document67 pagesKomunikasi Data 5Swa FikrahNo ratings yet
- Data Communication NetworksDocument52 pagesData Communication Networksthisa93No ratings yet
- X X XX X Yz X Yx Z Let P Abandq Ab PQ Ab Ab Ab Aab B X Yz X Yx Z B ADocument27 pagesX X XX X Yz X Yx Z Let P Abandq Ab PQ Ab Ab Ab Aab B X Yz X Yx Z B AmeghanaNo ratings yet
- Data Communication Concepts: Dr. Shuchita Upadhyaya Bhasin Professor Department of Computer Science & ApplicationsDocument14 pagesData Communication Concepts: Dr. Shuchita Upadhyaya Bhasin Professor Department of Computer Science & ApplicationsRaj VermaNo ratings yet
- 79 - Unit 1Document27 pages79 - Unit 1Gunjan GuptaNo ratings yet
- Physical Layers:: M. Zaman Ali, Lecturer, CS & ITDocument11 pagesPhysical Layers:: M. Zaman Ali, Lecturer, CS & ITAamir Fayyaz ShahNo ratings yet
- DLLec2b NotesDocument3 pagesDLLec2b NotesChintan MandalNo ratings yet
- Basic Digital ConceptsDocument19 pagesBasic Digital Conceptsaben.ezer443No ratings yet
- 1CSE 1203-Digital Logic Design-IntroductionDocument26 pages1CSE 1203-Digital Logic Design-Introductionmy studyNo ratings yet
- S&S - Week 3Document41 pagesS&S - Week 3machasong98No ratings yet
- Analog and Digital DataDocument11 pagesAnalog and Digital DatamgayananNo ratings yet
- Lecture 2 SignalsandSystems - PPTX - AnnotatedDocument25 pagesLecture 2 SignalsandSystems - PPTX - AnnotatedAkash PerlaNo ratings yet
- Pertemuan 2Document73 pagesPertemuan 2GalihNo ratings yet
- Physical Layer and MediaDocument56 pagesPhysical Layer and MediaVarunNo ratings yet
- Textbook:: Logic CircuitsDocument24 pagesTextbook:: Logic CircuitsMohamed SaadNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument33 pagesData and Computer Communications: Tenth Edition by William StallingsMohamed HelmyNo ratings yet
- تصميم منطقي كاملDocument89 pagesتصميم منطقي كاملmymoon200412No ratings yet
- Data Com 2Document42 pagesData Com 2Vidusha DilshanNo ratings yet
- DataCommunication (5CCI02) Module2 Part1Document131 pagesDataCommunication (5CCI02) Module2 Part1hafsatamer03No ratings yet
- Module 3 Analog and Digital SignalsDocument74 pagesModule 3 Analog and Digital Signalseltn s.No ratings yet
- Digital Timing CircuitsDocument12 pagesDigital Timing CircuitscmanNo ratings yet
- Lecture 09Document7 pagesLecture 09Dr. Rami HalloushNo ratings yet
- ECE 461: Digital Communication Lecture 8b: Pulse Shaping and SamplingDocument9 pagesECE 461: Digital Communication Lecture 8b: Pulse Shaping and SamplingShounak DasguptaNo ratings yet
- Lecture 6Document31 pagesLecture 6NANDINI AGGARWAL 211131No ratings yet
- Chapter-1 Introduction To Signals and Systems: SignalDocument24 pagesChapter-1 Introduction To Signals and Systems: SignalYaregal ChalachewNo ratings yet
- Pulse and Digital Circuits: III-B.Tech I-Sem-ECE (R19 Regulation) Prepared by Dr. K. RajuDocument32 pagesPulse and Digital Circuits: III-B.Tech I-Sem-ECE (R19 Regulation) Prepared by Dr. K. RajurajuNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- DLLec5c NotesDocument12 pagesDLLec5c NotesChintan MandalNo ratings yet
- DLLec3a NotesDocument12 pagesDLLec3a NotesChintan MandalNo ratings yet
- Most Complex Boolean Functions Detected by The Spe PDFDocument10 pagesMost Complex Boolean Functions Detected by The Spe PDFChintan MandalNo ratings yet
- DLLec8b NotesDocument9 pagesDLLec8b NotesChintan MandalNo ratings yet
- 2002 Boolean Functions Whose Fourier Transform Is Concentrated On The First Two Levels PDFDocument11 pages2002 Boolean Functions Whose Fourier Transform Is Concentrated On The First Two Levels PDFChintan MandalNo ratings yet
- Anachip 18CV8P 25 DatasheetDocument11 pagesAnachip 18CV8P 25 DatasheetMarcelo PerezNo ratings yet
- Single-Chip 8-Bit Microcontroller With 10-Bit A/D, Capture/compare Timer, High-Speed Outputs, PWMDocument23 pagesSingle-Chip 8-Bit Microcontroller With 10-Bit A/D, Capture/compare Timer, High-Speed Outputs, PWMVelelectron VnrNo ratings yet
- Xaar 128 OpGuide OptDocument70 pagesXaar 128 OpGuide OptmehoNo ratings yet
- Digital Logic Design (EL-227) : Laboratory Manual Spring-2020Document5 pagesDigital Logic Design (EL-227) : Laboratory Manual Spring-2020Demin revisNo ratings yet
- An 368.PdfcnDocument8 pagesAn 368.PdfcnAlcides AcevedoNo ratings yet
- Unit 08Document36 pagesUnit 08Saidur Rahman SidNo ratings yet
- Logic Signal Voltage LevelsDocument51 pagesLogic Signal Voltage LevelsDoDuyBacNo ratings yet
- User's Manual of RDC6445GZ Control System V1.0 PDFDocument71 pagesUser's Manual of RDC6445GZ Control System V1.0 PDFСергейNo ratings yet
- NV10 Bank Note Validating System: Innovative Technology LimitedDocument43 pagesNV10 Bank Note Validating System: Innovative Technology LimitedZoffi PedersenNo ratings yet
- Lecture 17 PDFDocument11 pagesLecture 17 PDFattiqueNo ratings yet
- Gate AssignmentDocument5 pagesGate AssignmentAtta Ur Rahman AfridiNo ratings yet
- Glossray To Digital ElectronicsDocument9 pagesGlossray To Digital ElectronicsTarun SrivastavaNo ratings yet
- Collection LCD Led Panel Failure and Faults v1.0Document159 pagesCollection LCD Led Panel Failure and Faults v1.0Francisco AntonioNo ratings yet
- Max 7301Document17 pagesMax 7301hugosaldanoNo ratings yet
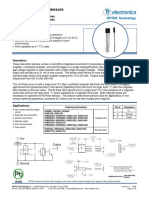
- Hallogic Hall-Effect Sensors: FeaturesDocument9 pagesHallogic Hall-Effect Sensors: FeaturesMichel MoacirNo ratings yet
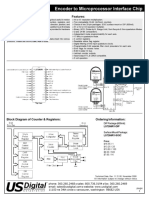
- Encoder To Microprocessor Interface Chip Chip: Features: DescriptionDocument6 pagesEncoder To Microprocessor Interface Chip Chip: Features: DescriptionserviciobsasNo ratings yet
- S 000542Document19 pagesS 000542Anonymous BkmsKXzwyKNo ratings yet
- Datasheet - AX5312 12-Bit 10 12 15V DAC MAX5312Document19 pagesDatasheet - AX5312 12-Bit 10 12 15V DAC MAX5312carrubaNo ratings yet
- Digital Electronics 1 (ET181) Laboratory Manual: (Where Theory Meets Practice)Document111 pagesDigital Electronics 1 (ET181) Laboratory Manual: (Where Theory Meets Practice)Isha MohadikarNo ratings yet
- Data Sheet 7404Document7 pagesData Sheet 7404Thorik AchsanNo ratings yet
- PMS-300 Rhino Hardware ManualDocument39 pagesPMS-300 Rhino Hardware ManualGanesh Kumar ArumugamNo ratings yet
- Logic Gates QuestionsDocument14 pagesLogic Gates QuestionsDinMat0% (2)
- Mfi 2.0BDocument48 pagesMfi 2.0BPremchand NidigantiNo ratings yet
- E46 Trouble CodesDocument15 pagesE46 Trouble CodesAndreea Filip86% (7)
- Arduino KeypadDocument12 pagesArduino KeypadscreamoutNo ratings yet
- STM6600, STM6601: Smart Push-Button On/off Controller With Smart Reset™ and Power-On LockoutDocument52 pagesSTM6600, STM6601: Smart Push-Button On/off Controller With Smart Reset™ and Power-On LockoutJAYAKRISHNAN.K.RNo ratings yet
- Manual CO2 Laser SHPower SupplyDocument9 pagesManual CO2 Laser SHPower SupplyDawid RyżakNo ratings yet
- Advanced Motion Controls BE30A8Document9 pagesAdvanced Motion Controls BE30A8Servo2GoNo ratings yet
- Co4011B-Fl: Single Chip Canopen Controller For Remote I/ODocument45 pagesCo4011B-Fl: Single Chip Canopen Controller For Remote I/OKrum KashavarovNo ratings yet
- Injector and Ignition Driver For Automotive ApplicationsDocument25 pagesInjector and Ignition Driver For Automotive ApplicationsAnonymous 4IEjoc100% (2)