You might also like
- Cat IiDocument72 pagesCat Iizeroseya100% (2)
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Rating: 4.5 out of 5 stars4.5/5 (5)
- The Perfect Answer Physics Revision Guide - Edexcel IGCSE 9-1 - 1st EditionDocument34 pagesThe Perfect Answer Physics Revision Guide - Edexcel IGCSE 9-1 - 1st EditionKevir Man83% (6)
- Dimensional Analysis and SimilitudeDocument25 pagesDimensional Analysis and Similitudejllama20004321No ratings yet
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- Response of Buried Pipelines Subject To Earthquake EffectsDocument276 pagesResponse of Buried Pipelines Subject To Earthquake EffectspdajamNo ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- Physical Quantities and System of Units: Physics Lesson 1Document4 pagesPhysical Quantities and System of Units: Physics Lesson 1Douglas Kufre-Abasi GilbertNo ratings yet
- Name: Score: Course/Section: Date: Schedule (Day/Time)Document6 pagesName: Score: Course/Section: Date: Schedule (Day/Time)Once TWICENo ratings yet
- asset-v1-DelftX+TP102x+3T2016+type@asset+block@Formula Sheet ATPDocument12 pagesasset-v1-DelftX+TP102x+3T2016+type@asset+block@Formula Sheet ATPkennethmsorianoNo ratings yet
- Fundamentals of Underwater Acoustics - Dr. Serkan AKSOYDocument48 pagesFundamentals of Underwater Acoustics - Dr. Serkan AKSOYNikos KampolisNo ratings yet
- Unit 4 PhysicsDocument6 pagesUnit 4 PhysicsChristine MoniqueNo ratings yet
- UNITSDocument1 pageUNITSRaihanNo ratings yet
- 1.0 - Physical Quantities and Units PDFDocument13 pages1.0 - Physical Quantities and Units PDFSeth SimumbaNo ratings yet
- Chapter 1 - Introduction: Phys IDocument4 pagesChapter 1 - Introduction: Phys INiel A.No ratings yet
- Physics Igcse 2012 Exam Revision Notes-56395934Document34 pagesPhysics Igcse 2012 Exam Revision Notes-56395934masairev8No ratings yet
- Introduction To As Level PhysicsDocument4 pagesIntroduction To As Level PhysicsMaria BhaijiNo ratings yet
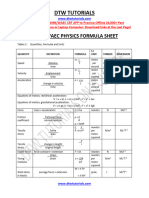
- DTW Tutorials 135 Physics Formula SheetDocument16 pagesDTW Tutorials 135 Physics Formula Sheetggold0934No ratings yet
- Statics of Rigid Bodies: Chapter 1: Introduction To MechanicsDocument17 pagesStatics of Rigid Bodies: Chapter 1: Introduction To MechanicsRyan Philip CatapangNo ratings yet
- Physics SymbolsDocument2 pagesPhysics SymbolsAbdul SamiNo ratings yet
- Lesson 1: Units, Physical Quantities, and Vectors: Physics 1Document8 pagesLesson 1: Units, Physical Quantities, and Vectors: Physics 1GM ShioriNo ratings yet
- Illuminanace Lecture 2 PDFDocument36 pagesIlluminanace Lecture 2 PDFMohammad RazaullahNo ratings yet
- Units and MeasurmentDocument15 pagesUnits and MeasurmentVishwajeet KumarNo ratings yet
- Reading 1Document11 pagesReading 1shafyvonommyNo ratings yet
- Physical Quantities, Standards and Units PDFDocument6 pagesPhysical Quantities, Standards and Units PDFARAVINDNo ratings yet
- Easurements: Course: Diploma Subject: Applied Science Physics Unit: IDocument28 pagesEasurements: Course: Diploma Subject: Applied Science Physics Unit: Ipankaj baviskarNo ratings yet
- Named Units Derived FromDocument5 pagesNamed Units Derived FromYuunari LingNo ratings yet
- WEEK 1 Base and Derived UnitsDocument6 pagesWEEK 1 Base and Derived UnitsannmarieNo ratings yet
- Module 1Document96 pagesModule 1Mariane CarandangNo ratings yet
- Fluid Mechanics FormulaDocument3 pagesFluid Mechanics FormulaKamran ZafarNo ratings yet
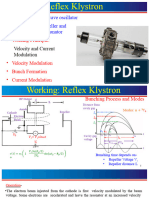
- YS ReflexKlystron TWT MagnetronDocument44 pagesYS ReflexKlystron TWT Magnetronprojects allNo ratings yet
- RevisionDocument16 pagesRevisionKhánh Trà QuốcNo ratings yet
- Units and Measures: Table 1. SI Radiometry UnitsDocument6 pagesUnits and Measures: Table 1. SI Radiometry UnitsLeo CerenoNo ratings yet
- Base Si UnitsDocument10 pagesBase Si UnitsJehana NaolNo ratings yet
- Base Quantities & Units: MeasurementsDocument5 pagesBase Quantities & Units: MeasurementsMickyNo ratings yet
- Physics Muster PDFDocument36 pagesPhysics Muster PDFMarlon FariaNo ratings yet
- 1 - Physical Quantities & UnitsDocument9 pages1 - Physical Quantities & UnitsKaem ViottoNo ratings yet
- Rajbala: Ph.D. Student and Teaching AssistantDocument20 pagesRajbala: Ph.D. Student and Teaching AssistantMohamed shabanaNo ratings yet
- Appendix A: The International System of UnitsDocument8 pagesAppendix A: The International System of UnitsIvan gheorgheNo ratings yet
- Physics Exam Quick Revision NotesDocument40 pagesPhysics Exam Quick Revision NotesPinky Ann DanielNo ratings yet
- BJT Frequency Response Laboratory PDFDocument8 pagesBJT Frequency Response Laboratory PDFReiniel Cirujano AntonioNo ratings yet
- System of Units:-: For More Info VisitDocument5 pagesSystem of Units:-: For More Info VisitRishab BNo ratings yet
- List of Symbols For The A2 Course That You Need To LEARN: Equation(s) You Find It in Quantity Symbol Unit Symbol E KQ/RDocument1 pageList of Symbols For The A2 Course That You Need To LEARN: Equation(s) You Find It in Quantity Symbol Unit Symbol E KQ/RTom BellNo ratings yet
- UNITS AND DIMENSIONS Lyst8144Document12 pagesUNITS AND DIMENSIONS Lyst8144Shaam L VNo ratings yet
- Unit and DimensionsDocument5 pagesUnit and DimensionsSanatan KumarNo ratings yet
- Notebook 1: Lindsey ShrinerDocument3 pagesNotebook 1: Lindsey Shrinerapi-338662480No ratings yet
- System of Units:-: Physical Quantity Symbol Dimension Measurement Unit UnitDocument5 pagesSystem of Units:-: Physical Quantity Symbol Dimension Measurement Unit UnitRam KrishNo ratings yet
- ELEC4810: Introduction To Biosensors and Bioinstrumentation: Lecture Notes - Set #10Document17 pagesELEC4810: Introduction To Biosensors and Bioinstrumentation: Lecture Notes - Set #10Kwan ChanNo ratings yet
- Understanding Electrical Networks Understanding Electrical NetworksDocument51 pagesUnderstanding Electrical Networks Understanding Electrical NetworksOana Laura StefanNo ratings yet
- Experiment 09: Angular MomentumDocument29 pagesExperiment 09: Angular MomentumHasan AydonNo ratings yet
- Physics NotesDocument48 pagesPhysics NotesAshley LimNo ratings yet
- General Physics 1 NotesDocument6 pagesGeneral Physics 1 NotesJashley PanillaNo ratings yet
- Radiant Flux Family PDFDocument8 pagesRadiant Flux Family PDFDelos NourseiNo ratings yet
- SI Derived Unit - Wikipedia, The Free EncyclopediaDocument6 pagesSI Derived Unit - Wikipedia, The Free EncyclopediaLauren SerafiniNo ratings yet
- SI Unit Name Symbol British Unit Quantity Definition & FormulaDocument3 pagesSI Unit Name Symbol British Unit Quantity Definition & Formulaapi-356951570No ratings yet
- Physical Quantities and System of Units: Physics Lesson 1Document4 pagesPhysical Quantities and System of Units: Physics Lesson 1Douglas Kufre-Abasi GilbertNo ratings yet
- Physical Quantities and System of Units: Physics Lesson 1Document4 pagesPhysical Quantities and System of Units: Physics Lesson 1Douglas Kufre-Abasi GilbertNo ratings yet
- Notebook 1Document4 pagesNotebook 1api-338661748No ratings yet
- Physics Lesson (Lesson 1)Document4 pagesPhysics Lesson (Lesson 1)Douglas Kufre-Abasi GilbertNo ratings yet
- Derived QuantityDocument3 pagesDerived Quantityclara veronicaNo ratings yet
- Unit 1 - Power System Operation and ControlDocument21 pagesUnit 1 - Power System Operation and ControlSilas StephenNo ratings yet
- SI SystemDocument19 pagesSI SystemmyscribdzoneNo ratings yet
- Phychem 1 Review 1 Sept 2015Document2 pagesPhychem 1 Review 1 Sept 2015Jupert Jasser AbellanaNo ratings yet
- AP Electrostatics MCQ With AnswersDocument34 pagesAP Electrostatics MCQ With Answersyash vijayNo ratings yet
- Force and Motion - 1Document31 pagesForce and Motion - 1yasvialan ariantaNo ratings yet
- 18BEFE31-Thermodynamics in Food Processing: Unit - IvDocument53 pages18BEFE31-Thermodynamics in Food Processing: Unit - IvPooja Sri V S BE FPPTNo ratings yet
- 0625 Example Candidate Responses Paper 3 (For Examination From 2016)Document40 pages0625 Example Candidate Responses Paper 3 (For Examination From 2016)Nurul Aufa BadruldinNo ratings yet
- Computer Models For Nonlinear Analysis of Reinforced and Prestressed Concrete StructuresDocument20 pagesComputer Models For Nonlinear Analysis of Reinforced and Prestressed Concrete StructuresLavinia DamianNo ratings yet
- Cement Clinker AnalysisDocument120 pagesCement Clinker AnalysisZarni AungNo ratings yet
- Devices, Circuits, and Applications: Introduction To Renewable EnergyDocument104 pagesDevices, Circuits, and Applications: Introduction To Renewable EnergyAtiq Ur RehmanNo ratings yet
- 4 Mutual InductanceDocument3 pages4 Mutual Inductanceapi-27307515No ratings yet
- Test Papers 176476Document29 pagesTest Papers 176476Gaurav SarkarNo ratings yet
- ECE 373, Part III P-N Junction: Russell Ohl (1898-1987)Document15 pagesECE 373, Part III P-N Junction: Russell Ohl (1898-1987)Zakaria ElwalilyNo ratings yet
- Worksheet: Mixtures and Solutions: ClassDocument4 pagesWorksheet: Mixtures and Solutions: ClassMhia TapulayanNo ratings yet
- Hassan SOSEDocument6 pagesHassan SOSEedgarsierraNo ratings yet
- 8051 Willar ProgrammerDocument5 pages8051 Willar ProgrammerShouvik SaNo ratings yet
- Formula Booklet CHE572 Sept2019Document21 pagesFormula Booklet CHE572 Sept2019Mohd Yashfi YunusNo ratings yet
- NR-310804 - Mass Transfer Operations - IDocument8 pagesNR-310804 - Mass Transfer Operations - ISrinivasa Rao G100% (1)
- Production of Electricity by The Method of Road Power GenerationDocument5 pagesProduction of Electricity by The Method of Road Power GenerationUsama RiazNo ratings yet
- Thermoluminecent Dosimeters: Nayana.M M.Sc. Radiation Physics Calicut UniversityDocument18 pagesThermoluminecent Dosimeters: Nayana.M M.Sc. Radiation Physics Calicut UniversityKopi TiamNo ratings yet
- JEE Main 2023 Jan 31 Shift 2 Physics Question Paper (Memory-Based)Document4 pagesJEE Main 2023 Jan 31 Shift 2 Physics Question Paper (Memory-Based)Nachiketha RNo ratings yet
- On "The Rise and Fall of The Black Hole Paradigm"Document4 pagesOn "The Rise and Fall of The Black Hole Paradigm"Dr Abhas MitraNo ratings yet
- Lesson Exemplar For VolcanoDocument7 pagesLesson Exemplar For VolcanoAngelita MenesesNo ratings yet
- Revised Stokes Law Sedimentationand Settling DesignDocument5 pagesRevised Stokes Law Sedimentationand Settling DesignUghamadu ChikeNo ratings yet
- International Gcse: PhysicsDocument29 pagesInternational Gcse: PhysicsMaryam AburayaNo ratings yet
- W3 Yield Criteria Rev1-BasDocument62 pagesW3 Yield Criteria Rev1-BasKhairul KaiNo ratings yet
- JP XII Physical&Inorganic Chemistry (10) - Prev Chaps + Co-Ordination Compound PDFDocument15 pagesJP XII Physical&Inorganic Chemistry (10) - Prev Chaps + Co-Ordination Compound PDFSudhanshu BharadwajNo ratings yet
- Atom Atom: Electron, The Proton and The NeutronDocument29 pagesAtom Atom: Electron, The Proton and The Neutronrehab ebraheemNo ratings yet
- Chapter 4.1-Lewis StructureDocument4 pagesChapter 4.1-Lewis StructureSupia NazmaNo ratings yet
- Lecture 02Document14 pagesLecture 02Dejan DjokićNo ratings yet