You might also like
- Journal-Neural Network Based Terminal Sliding Mode Control For WMRs Affected by An Augmented Ground Friction With Slippage EffectDocument9 pagesJournal-Neural Network Based Terminal Sliding Mode Control For WMRs Affected by An Augmented Ground Friction With Slippage EffectPham ThuanNo ratings yet
- Time Delay ControlDocument7 pagesTime Delay ControlGeet DeokateNo ratings yet
- Dynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkDocument6 pagesDynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkSuhail Ahmad SuhailNo ratings yet
- Robust Adaptive Control of Direct Drive Brushless DC Motors and Applications T o Robotic ManipulatorstDocument6 pagesRobust Adaptive Control of Direct Drive Brushless DC Motors and Applications T o Robotic Manipulatorstbaoboi13112007No ratings yet
- Research ArticleDocument14 pagesResearch ArticleMaria RitaNo ratings yet
- Speed Control of DC Motor Using Fuzzy Logic and PID Controller ComparisonDocument5 pagesSpeed Control of DC Motor Using Fuzzy Logic and PID Controller ComparisonAbdulrahman BastaNo ratings yet
- Friction Compensation and Disturbance Observer Design for Precision Motion ControlDocument5 pagesFriction Compensation and Disturbance Observer Design for Precision Motion ControlaliNo ratings yet
- Artículo Base de DatosDocument6 pagesArtículo Base de DatosJuan Sebas Causil Causil RamirezNo ratings yet
- Friction Compensation for a Double Inverted Pendulum Using a Modified First-Order Dahl ModelDocument6 pagesFriction Compensation for a Double Inverted Pendulum Using a Modified First-Order Dahl Modelمحمد المهندسNo ratings yet
- Kamal DinDocument11 pagesKamal DinGabriel Herrera GonzalezNo ratings yet
- A New Robust Speed-Sensorless Control StrategyDocument13 pagesA New Robust Speed-Sensorless Control StrategyJean-Sébastien FromontNo ratings yet
- A Simple Indirect Field-Oriented Control Scheme For Multiphase Induction Machine, 2005.Document8 pagesA Simple Indirect Field-Oriented Control Scheme For Multiphase Induction Machine, 2005.Ali H. NumanNo ratings yet
- RT-Lab Based Real-Time Simulation of A Direct Field-Oriented Controller For An Induction MotorDocument6 pagesRT-Lab Based Real-Time Simulation of A Direct Field-Oriented Controller For An Induction MotorMagpie 2023No ratings yet
- Luo 2018Document18 pagesLuo 2018Aritra DasguptaNo ratings yet
- Tplus en 4701Document6 pagesTplus en 4701raghav4life8724No ratings yet
- Adaptive Control of Uncertain Gear Transmission Servo Systems With Deadzone NonlinearityDocument9 pagesAdaptive Control of Uncertain Gear Transmission Servo Systems With Deadzone Nonlinearitysaleh1978No ratings yet
- Bodson - Chiasson - Induction Motor Via Input-Output LinearDocument9 pagesBodson - Chiasson - Induction Motor Via Input-Output LinearmorilloatilioNo ratings yet
- Research Article: Type-2 Fuzzy Logic Controller of A Doubly Fed Induction MachineDocument11 pagesResearch Article: Type-2 Fuzzy Logic Controller of A Doubly Fed Induction MachineBharath ykNo ratings yet
- A New Intelligent Adaptation Mechanism of MRAS Based On A Genetic Algorithm Applied To Speed Sensorless Direct Torque Control For Induction MotorDocument16 pagesA New Intelligent Adaptation Mechanism of MRAS Based On A Genetic Algorithm Applied To Speed Sensorless Direct Torque Control For Induction Motorsaid mahfoudNo ratings yet
- 2001 Frequency-Domain Analysis of Three-Phase Linear Current Regulators PDFDocument10 pages2001 Frequency-Domain Analysis of Three-Phase Linear Current Regulators PDFdhirajlovesmaaNo ratings yet
- A Robust Controller Design For A Robotic SystemDocument6 pagesA Robust Controller Design For A Robotic SystemPriyanka KilaniyaNo ratings yet
- MATLAB Simulation of Induction Machine With Saturable Leakage and Magnetizing InductancesDocument11 pagesMATLAB Simulation of Induction Machine With Saturable Leakage and Magnetizing InductancesAid ZekolliNo ratings yet
- Improvement in Direct Torque Control ofDocument7 pagesImprovement in Direct Torque Control ofMhamed ZemriNo ratings yet
- Frequency Stability of Synchronous Machines and Grid-Forming Power ConvertersDocument15 pagesFrequency Stability of Synchronous Machines and Grid-Forming Power ConvertersSuhib FekryNo ratings yet
- Speed Nonlinear Control of DC Motor Drive With Field WeakeningDocument7 pagesSpeed Nonlinear Control of DC Motor Drive With Field WeakeningJuan Jose LeónNo ratings yet
- Research Interact With Human Statement 3Document12 pagesResearch Interact With Human Statement 3Alexander Waiganjo MachariaNo ratings yet
- Modified Winding Function Approach To Stator Fault Modelling of Synchronous GeneratorDocument6 pagesModified Winding Function Approach To Stator Fault Modelling of Synchronous GeneratormohammadNo ratings yet
- Backstepping_control_for_an_induction_moDocument6 pagesBackstepping_control_for_an_induction_moNguyễn Văn HoàNo ratings yet
- Proportional-Resonant Current Controllers Design Based On Desired Transient PerformanceDocument5 pagesProportional-Resonant Current Controllers Design Based On Desired Transient PerformanceBook4AllNo ratings yet
- Terminal Sliding ModesDocument4 pagesTerminal Sliding ModesAldin BeganovicNo ratings yet
- Tuning of Control Loops For Grid Connected Voltage Source ConvertersDocument6 pagesTuning of Control Loops For Grid Connected Voltage Source ConvertersThiago Moura GalvãoNo ratings yet
- Control of A Power Circuit Interface of A Flywheel-Based Energy Stor-Age SystemDocument6 pagesControl of A Power Circuit Interface of A Flywheel-Based Energy Stor-Age SystemSantiago Bonilla RiveraNo ratings yet
- Marti Synchronous MachineDocument8 pagesMarti Synchronous MachineAlex SanchezNo ratings yet
- Sciendo: Nonlinear PD Plus Sliding Mode Control With Application To A Parallel Delta RobotDocument8 pagesSciendo: Nonlinear PD Plus Sliding Mode Control With Application To A Parallel Delta RobotĐức QuangNo ratings yet
- Fuzzy Speed Controller Design of Three Phase Induction MotorDocument6 pagesFuzzy Speed Controller Design of Three Phase Induction MotorELECTRICAL DEPARTMENTNo ratings yet
- Simulink Model of an Induction Machine DynamicsDocument9 pagesSimulink Model of an Induction Machine DynamicsHernanda BudizNo ratings yet
- Adaptive Neuro-Fuzzy Controller For Improved Performance A Permanent Magnet Brushless DC MotorDocument4 pagesAdaptive Neuro-Fuzzy Controller For Improved Performance A Permanent Magnet Brushless DC MotorJulián Peláez RestrepoNo ratings yet
- Transient Behaviour of Three Phase Induction Motor Under Supply Interruption of One Phase During StartingDocument4 pagesTransient Behaviour of Three Phase Induction Motor Under Supply Interruption of One Phase During StartingkentNo ratings yet
- Analysis and Design of Adaptive Current Controller For DC Drive Using Z-TransformDocument6 pagesAnalysis and Design of Adaptive Current Controller For DC Drive Using Z-TransformDio Izqhaq Risky SasongkoNo ratings yet
- Application of Fuzzy Logic To The Speed Control of DC MotorDocument6 pagesApplication of Fuzzy Logic To The Speed Control of DC MotorHemanth SaiNo ratings yet
- Fuzzy Logic Control of Classic Sdof Spring Mass Dashpot SystemDocument8 pagesFuzzy Logic Control of Classic Sdof Spring Mass Dashpot SystemAhmed.AhmedNo ratings yet
- Discrete-Time VSC with Decoupled Disturbance CompensatorDocument10 pagesDiscrete-Time VSC with Decoupled Disturbance CompensatorFernando OrnelasNo ratings yet
- Determination of Synchronous Machine Parameters THDocument4 pagesDetermination of Synchronous Machine Parameters THMoussa Koné KmNo ratings yet
- Mechanical Systems and Signal Processing: Zhi-Cheng QiuDocument19 pagesMechanical Systems and Signal Processing: Zhi-Cheng QiuLakshmi Ganesh SudikondaNo ratings yet
- 2 UnbalancedDocument5 pages2 UnbalancedAnonymous 1kSjOqIhNo ratings yet
- 26th Chinese Control Conference Active Vehicle Suspension ProceedingsDocument6 pages26th Chinese Control Conference Active Vehicle Suspension ProceedingsThiago CésarNo ratings yet
- Bendaas 2014Document7 pagesBendaas 2014Hieu LENo ratings yet
- Fast Flux Linkage Measurement For Switched Reluctance Motors Excluding Rotor Clamping Devices and Position SensorsDocument7 pagesFast Flux Linkage Measurement For Switched Reluctance Motors Excluding Rotor Clamping Devices and Position SensorsLalbahadur MajhiNo ratings yet
- Australian Journal of Basic and Applied Sciences: AENSI JournalsDocument14 pagesAustralian Journal of Basic and Applied Sciences: AENSI JournalsmoafrNo ratings yet
- Analysis of DC Offset in Fault Current Caused by MDocument6 pagesAnalysis of DC Offset in Fault Current Caused by MLast Greed7up1No ratings yet
- Variable structure control improves positioning in hydraulic systemsDocument7 pagesVariable structure control improves positioning in hydraulic systemsPierre TrillosNo ratings yet
- Results in Physics: Mundher H.A. Yaseen, Haider J. AbdDocument7 pagesResults in Physics: Mundher H.A. Yaseen, Haider J. Abdbabylon telecomNo ratings yet
- 1 s2.0 S2307187723001074 MainDocument15 pages1 s2.0 S2307187723001074 MainJohn AsmaraNo ratings yet
- ++field Weakening Operation With Maximum TorqueDocument7 pages++field Weakening Operation With Maximum TorqueGaspar RodriguezNo ratings yet
- Electrical Power and Energy Systems: Maghsoud Mokhtari, Javad Khazaei, Daryoosh NazarpourDocument8 pagesElectrical Power and Energy Systems: Maghsoud Mokhtari, Javad Khazaei, Daryoosh NazarpourAnh TuanNo ratings yet
- elearnica_ir_Sub_Synchronous_ResDocument8 pageselearnica_ir_Sub_Synchronous_ResGanesh DuraisamyNo ratings yet
- Frequency Domain Analysis of Three Phase Linear Current RegulatorsDocument1 pageFrequency Domain Analysis of Three Phase Linear Current RegulatorsFadhil A. HasanNo ratings yet
- Critical Excitation Methods in Earthquake EngineeringFrom EverandCritical Excitation Methods in Earthquake EngineeringRating: 4 out of 5 stars4/5 (1)
- Discrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsFrom EverandDiscrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsNo ratings yet
- Classical Approach to Constrained and Unconstrained Molecular DynamicsFrom EverandClassical Approach to Constrained and Unconstrained Molecular DynamicsNo ratings yet
- ANSI C63 17 v0 4Document80 pagesANSI C63 17 v0 4Aritra DasguptaNo ratings yet
- BM71BLES1FC20B02AADocument70 pagesBM71BLES1FC20B02AAAritra DasguptaNo ratings yet
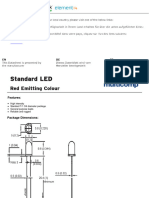
- While Stock Lasts: Power Consumption Rated Life Brightness (LM: Lumens)Document2 pagesWhile Stock Lasts: Power Consumption Rated Life Brightness (LM: Lumens)Aritra DasguptaNo ratings yet
- MurrElektronik Cable Selection GuideDocument8 pagesMurrElektronik Cable Selection GuideAritra DasguptaNo ratings yet
- Technical Data Sheet Luminosity White Color LED: 61-238/XK2C-BXXXXXXXXXX/ETDocument16 pagesTechnical Data Sheet Luminosity White Color LED: 61-238/XK2C-BXXXXXXXXXX/ETAritra DasguptaNo ratings yet
- Energy Efficiency CertificationDocument31 pagesEnergy Efficiency CertificationAritra DasguptaNo ratings yet
- Cree Xlamp XP-e Leds: Product Family Data SheetDocument17 pagesCree Xlamp XP-e Leds: Product Family Data SheetaerNo ratings yet
- Electronic Switches Test Report IEC 60669 - 2 - 1Document61 pagesElectronic Switches Test Report IEC 60669 - 2 - 1Aritra DasguptaNo ratings yet
- 1498852Document5 pages1498852Aritra DasguptaNo ratings yet
- NKBA Kitchen and Bath WorkbookDocument20 pagesNKBA Kitchen and Bath WorkbookJohnNo ratings yet
- Luo 2018Document18 pagesLuo 2018Aritra DasguptaNo ratings yet
- Toaz - Info Bs General Requirements Electrical Accessory PRDocument58 pagesToaz - Info Bs General Requirements Electrical Accessory PRAritra DasguptaNo ratings yet
- An Improved Dimmable LED Driving Scheme With Low Flicker Metrics For Low Voltage ApplicationDocument8 pagesAn Improved Dimmable LED Driving Scheme With Low Flicker Metrics For Low Voltage ApplicationAritra DasguptaNo ratings yet
- An Improved Dimmable LED Driving Scheme With Low Flicker Metrics For Low Voltage ApplicationDocument8 pagesAn Improved Dimmable LED Driving Scheme With Low Flicker Metrics For Low Voltage ApplicationAritra DasguptaNo ratings yet
- Nema Bi 50002-2022 Watermarked - 2023-10-04Document12 pagesNema Bi 50002-2022 Watermarked - 2023-10-04Aritra DasguptaNo ratings yet
- Exp LG 004285 - 0Document1 pageExp LG 004285 - 0Aritra DasguptaNo ratings yet
- Harb 2004Document8 pagesHarb 2004Aritra DasguptaNo ratings yet
- Electrical Encyclopedia and Detail Guide - NEC Code, NEMA Wiring You Need To Know - Father's Day GiftDocument73 pagesElectrical Encyclopedia and Detail Guide - NEC Code, NEMA Wiring You Need To Know - Father's Day GiftAritra DasguptaNo ratings yet
- UL 1995 474 484 CSA 236 117 92 Superseded by UL CSA 60335 2 40 SUN ED 1 1 2024Document8 pagesUL 1995 474 484 CSA 236 117 92 Superseded by UL CSA 60335 2 40 SUN ED 1 1 2024Aritra DasguptaNo ratings yet
- LED Lamp QualityDocument120 pagesLED Lamp QualityAritra DasguptaNo ratings yet
- UL 873 12th Ed 16 Nov 2007 ED 8 31 2019Document4 pagesUL 873 12th Ed 16 Nov 2007 ED 8 31 2019Aritra DasguptaNo ratings yet
- RTLCB PDFDocument243 pagesRTLCB PDFclaudio lopesNo ratings yet
- Visual Bassic GuideDocument1,329 pagesVisual Bassic GuideFernando GonzalezNo ratings yet
- IJEETDocument9 pagesIJEETAritra DasguptaNo ratings yet
- A Comparison of Programming Languages For Graphical User InterfacDocument14 pagesA Comparison of Programming Languages For Graphical User InterfacAritra DasguptaNo ratings yet
- Maths Tuition Test Class - 5: 1. Fill UpsDocument7 pagesMaths Tuition Test Class - 5: 1. Fill UpsYedu KrishnaNo ratings yet
- Artificial Neural NetworkDocument18 pagesArtificial Neural NetworkAbhijit Guha RoyNo ratings yet
- Abhyas Feb 2022 Magazine by Aashish AroraDocument85 pagesAbhyas Feb 2022 Magazine by Aashish AroraSakshi KatiyarNo ratings yet
- Module 1 2nd Quarter d11Document5 pagesModule 1 2nd Quarter d11Abbie RañosaNo ratings yet
- Eng1001 Vectors ExamplesDocument2 pagesEng1001 Vectors ExamplesAhza JufriNo ratings yet
- BCSL-022Document7 pagesBCSL-022Sagnik BairagyaNo ratings yet
- Perimeter and CircumferenceDocument3 pagesPerimeter and CircumferenceLezerf LanatnopNo ratings yet
- 24.3.9. Setting Time-Dependent Parameters For The Explicit Volume Fraction FormulationDocument2 pages24.3.9. Setting Time-Dependent Parameters For The Explicit Volume Fraction Formulations18025 s18025No ratings yet
- Performance Based Assessment - Week 1Document3 pagesPerformance Based Assessment - Week 1Endeno JessicaNo ratings yet
- Nguyễn Nhật Anh Sc 2312 Private Test 137 Mads 1600Document20 pagesNguyễn Nhật Anh Sc 2312 Private Test 137 Mads 1600anh.nguyennhat.279No ratings yet
- Linear Programming (Basic Concepts)Document4 pagesLinear Programming (Basic Concepts)vasuNo ratings yet
- DES-TIME-2006 Numerical Methods with the Voyage 200Document19 pagesDES-TIME-2006 Numerical Methods with the Voyage 200José RêgoNo ratings yet
- A Brief History of Feedback Control Lewis PDFDocument19 pagesA Brief History of Feedback Control Lewis PDFAnonymous VfH06fQXbANo ratings yet
- Calculate the volume of the Louvre PyramidDocument11 pagesCalculate the volume of the Louvre PyramidAPNo ratings yet
- Unit 1 Real Numbers - Activities 1 (4º ESO)Document3 pagesUnit 1 Real Numbers - Activities 1 (4º ESO)lumaromartinNo ratings yet
- Yogi (2000) - Market CyclesDocument23 pagesYogi (2000) - Market CyclesRajat PorwalNo ratings yet
- Number TheoryDocument83 pagesNumber TheorySanat KamatNo ratings yet
- 1 Matrix Inversion by Gauss Jordan EliminationDocument6 pages1 Matrix Inversion by Gauss Jordan EliminationSphinx RainxNo ratings yet
- 3D Incompressible Flow Over Spheres and General Panel TechniquesDocument22 pages3D Incompressible Flow Over Spheres and General Panel TechniquessaintanddevilNo ratings yet
- MQ 10 Surds AnswersDocument68 pagesMQ 10 Surds Answershey148No ratings yet
- Understanding key convergence concepts in probabilityDocument17 pagesUnderstanding key convergence concepts in probabilityOsho AgrawalNo ratings yet
- Model Predictive ControlDocument42 pagesModel Predictive Controlzohaib319No ratings yet
- Introduction To PDE With FDDocument22 pagesIntroduction To PDE With FDإحسان خالد جودة الشحات ٣٥٧٣No ratings yet
- Fem 9Document22 pagesFem 9tilahun yeshiyeNo ratings yet
- Response of A Continuous Guideway On Equally Spaced Supports Traversed by A Moving VehicleDocument7 pagesResponse of A Continuous Guideway On Equally Spaced Supports Traversed by A Moving VehicleanirbanNo ratings yet
- For All Sanfoundry MCQ (1000+ MCQ) JOIN Telegram Group : Prev NextDocument368 pagesFor All Sanfoundry MCQ (1000+ MCQ) JOIN Telegram Group : Prev Nextsuraj rautNo ratings yet
- Data Structure and Algorithm - Fundamental Programing Part 1Document22 pagesData Structure and Algorithm - Fundamental Programing Part 1eli indahNo ratings yet
- Ib Mathematics HLDocument127 pagesIb Mathematics HLLorraine SabbaghNo ratings yet
- CS229 Problem Set #4 Neural Networks, EM Algorithm, and ConvergenceDocument10 pagesCS229 Problem Set #4 Neural Networks, EM Algorithm, and Convergencenxp HeNo ratings yet
- Mathematics Department MAT112 Tut 4a 2015Document1 pageMathematics Department MAT112 Tut 4a 2015victorNo ratings yet