You might also like
- CLC Close G1 TF (1, (1 1 0) ) H 1 ATAUR G1/ (1+G1 H) (WN, Z) Damp (ATAUR) T 0:.1:30 y Step (ATAUR, T) Plot (T, Y) Grid TitleDocument8 pagesCLC Close G1 TF (1, (1 1 0) ) H 1 ATAUR G1/ (1+G1 H) (WN, Z) Damp (ATAUR) T 0:.1:30 y Step (ATAUR, T) Plot (T, Y) Grid TitleSanjid ElahiNo ratings yet
- %dit Ifft: All All 'Enter No of Points' 'Enter Array in Bit Reversal Order'Document8 pages%dit Ifft: All All 'Enter No of Points' 'Enter Array in Bit Reversal Order'Saravana JaiNo ratings yet
- 2nd-Order System Characteristics and Step ResponsesDocument16 pages2nd-Order System Characteristics and Step Responsesalex carterNo ratings yet
- Prewitt vs Sobel Mask DifferencesDocument29 pagesPrewitt vs Sobel Mask DifferencesLal ChandNo ratings yet
- Digital Signal ProcessingDocument7 pagesDigital Signal Processingind sh1No ratings yet
- Lec08 2015Document42 pagesLec08 2015Abdelmajid AbouloifaNo ratings yet
- 1 1functionDocument35 pages1 1functionnor18No ratings yet
- Course Project 2023-2024 Group 2Document8 pagesCourse Project 2023-2024 Group 2elkjgNo ratings yet
- Course Project 2023-2024 Group 1Document8 pagesCourse Project 2023-2024 Group 1elkjgNo ratings yet
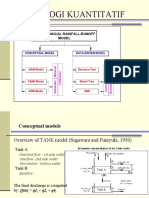
- Model HidrologiDocument32 pagesModel Hidrologizulqi iqbalNo ratings yet
- YASNAC-NX Common Parameter Initial Value TableDocument164 pagesYASNAC-NX Common Parameter Initial Value TableTrí ChốtNo ratings yet
- Pyl101 QM L4Document15 pagesPyl101 QM L4kamakshi gargNo ratings yet
- PF40 Step Logic Code Wizard Rev10Document5 pagesPF40 Step Logic Code Wizard Rev10Er. Piush JindalNo ratings yet
- Chapter 7 System Compensation: (Linear Control System Design)Document35 pagesChapter 7 System Compensation: (Linear Control System Design)Khin AyeNo ratings yet
- Introducción A Las Telecomunicaciones: Unmsm - Fiee E.P. Ingenieria de TelecomunicacionesDocument23 pagesIntroducción A Las Telecomunicaciones: Unmsm - Fiee E.P. Ingenieria de TelecomunicacionesThony HANo ratings yet
- TIA PRO1 06 Binary Operations 2 enDocument19 pagesTIA PRO1 06 Binary Operations 2 endikiNo ratings yet
- Neural Network Limitations OvercomeDocument43 pagesNeural Network Limitations OvercomeRMDNo ratings yet
- ICS Architecture (25 Slides)Document26 pagesICS Architecture (25 Slides)Paul MiersNo ratings yet
- Simulation With MatlabDocument36 pagesSimulation With MatlabKamasani PraveenaNo ratings yet
- Continuous Time Fourier Transform (CTFT) : F (F) Z F (T) e DTDocument5 pagesContinuous Time Fourier Transform (CTFT) : F (F) Z F (T) e DTJanNo ratings yet
- MATLAB Programs: % Program For The Generation of Unit Impulse SignalDocument96 pagesMATLAB Programs: % Program For The Generation of Unit Impulse Signalabdul.azeezNo ratings yet
- LCS Lab 11Document9 pagesLCS Lab 11SaRosh RaeesNo ratings yet
- Signals and System: Lab Sheet - 4Document5 pagesSignals and System: Lab Sheet - 4Shravan Kumar LuitelNo ratings yet
- Sampling and Reconstruction: Hanhdn@hcmut - Edu.vnDocument48 pagesSampling and Reconstruction: Hanhdn@hcmut - Edu.vnThành Vinh PhạmNo ratings yet
- Digital On-Chip Measurement of PLL Bandwidth and Peaking in 45-nm SOIDocument23 pagesDigital On-Chip Measurement of PLL Bandwidth and Peaking in 45-nm SOIgumptionsNo ratings yet
- CS Simulation ManualDocument11 pagesCS Simulation ManualpoornimaNo ratings yet
- CHAPTER 3: Example 8 and 9: Project Management Precedences 3 Time EstimatesDocument4 pagesCHAPTER 3: Example 8 and 9: Project Management Precedences 3 Time EstimatesAllie N. LehrerNo ratings yet
- PR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Document13 pagesPR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Armando MaloneNo ratings yet
- Control System Lab 9Document10 pagesControl System Lab 9Niamatullah WazirNo ratings yet
- Root locus analysis and PID controller design for digital control systemDocument6 pagesRoot locus analysis and PID controller design for digital control systemYuv RajNo ratings yet
- Chapter 2Document13 pagesChapter 2randompupil2008No ratings yet
- Practical Training Issues: Network Training Steps and Data PreprocessingDocument34 pagesPractical Training Issues: Network Training Steps and Data PreprocessingAlee LópezNo ratings yet
- 212 EEE 3310 LabSheet 04Document13 pages212 EEE 3310 LabSheet 04proddut ChakrabortyNo ratings yet
- GNG1106 Fall 2016 - Assignment 2 - Solution/Marking Scheme: Question 1 (15 Marks)Document5 pagesGNG1106 Fall 2016 - Assignment 2 - Solution/Marking Scheme: Question 1 (15 Marks)Chiheb DzNo ratings yet
- Introduction To Sigma Delta ConvertersDocument72 pagesIntroduction To Sigma Delta Convertershjtseng1974100% (1)
- Lec 04 Deep Networks 2Document78 pagesLec 04 Deep Networks 2Mr. CoffeeNo ratings yet
- PDFenDocument77 pagesPDFenAravindan Ganapathi subramanianNo ratings yet
- Xor Gate: Perceptron Can Not Realize An XOR Gate. We Need More Complex Network or Use Different Transfer FunctionsDocument12 pagesXor Gate: Perceptron Can Not Realize An XOR Gate. We Need More Complex Network or Use Different Transfer FunctionsRahul SinghNo ratings yet
- Common Nonlinearities and Describing FunctionsDocument16 pagesCommon Nonlinearities and Describing FunctionsMona AliNo ratings yet
- Generating Random SignalsDocument56 pagesGenerating Random SignalssamfgNo ratings yet
- LAB: Z-Transform and Its PropertiesDocument3 pagesLAB: Z-Transform and Its PropertiesMA KhanNo ratings yet
- ECE411 - 4c - The Z-Transform - Problem Set 1Document2 pagesECE411 - 4c - The Z-Transform - Problem Set 1Martine JimenezNo ratings yet
- Process Dynamic and Control: HadiyantoDocument112 pagesProcess Dynamic and Control: HadiyantoAtieGg KorNiea BrusHa LupHaNo ratings yet
- Chapter 4. Inverse Manipulator KinematicsDocument10 pagesChapter 4. Inverse Manipulator KinematicsSaad Ikram CheemaNo ratings yet
- DSP Using Matlab® - 6Document23 pagesDSP Using Matlab® - 6api-3721164100% (4)
- Exercises in Digital Signal Processing: Ivan W. Selesnick September 2, 2005Document74 pagesExercises in Digital Signal Processing: Ivan W. Selesnick September 2, 2005Glan DevadhasNo ratings yet
- Common Nonlinearities and Describing Functions FDocument16 pagesCommon Nonlinearities and Describing Functions FRohit JoshiNo ratings yet
- Chapter 4 Time Response of Dynamic Systems 1Document86 pagesChapter 4 Time Response of Dynamic Systems 1Rakhmeen gulNo ratings yet
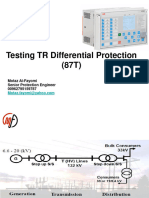
- MF ABB Testing Differential ProtectionDocument68 pagesMF ABB Testing Differential ProtectionGabriel Zenarosa LacsamanaNo ratings yet
- Comparing integration methods and estimating pi using Monte Carlo simulationDocument46 pagesComparing integration methods and estimating pi using Monte Carlo simulationgaur1234No ratings yet
- Fix Promes Masa Pandemi Covid 19Document2 pagesFix Promes Masa Pandemi Covid 19Muhamad ArapatNo ratings yet
- Routh - HurwitzDocument15 pagesRouth - Hurwitzali alaaNo ratings yet
- Control With Matlab Part 1Document28 pagesControl With Matlab Part 1jarossiterNo ratings yet
- Cell: 9952749533 WWW - Researchprojects.infoDocument55 pagesCell: 9952749533 WWW - Researchprojects.infosetsindia3735No ratings yet
- Notes 7.1 Graphing Exponential Functions PDFDocument11 pagesNotes 7.1 Graphing Exponential Functions PDFElias JonesNo ratings yet
- Signal Processing With WaveletDocument29 pagesSignal Processing With Waveletnarasimhan kumaraveluNo ratings yet
- 13exercise SolutionDocument6 pages13exercise Solutionayanabi8753No ratings yet
- Statistics and Data with R: An Applied Approach Through ExamplesFrom EverandStatistics and Data with R: An Applied Approach Through ExamplesRating: 3 out of 5 stars3/5 (2)
- Transistor Switching and Sequential CircuitsFrom EverandTransistor Switching and Sequential CircuitsRating: 5 out of 5 stars5/5 (1)
- Bi006008 00 02 - Body PDFDocument922 pagesBi006008 00 02 - Body PDFRamon HidalgoNo ratings yet
- IPPD Presentation Roll OutDocument34 pagesIPPD Presentation Roll OutGracel Alingod Galay100% (1)
- Teaser Rheosolve D 15ASDocument2 pagesTeaser Rheosolve D 15ASwahyuni raufianiNo ratings yet
- STAUFF Catalogue 1 STAUFF Clamps English TERBARU RemovedDocument5 pagesSTAUFF Catalogue 1 STAUFF Clamps English TERBARU RemovedBayuAnggaraNo ratings yet
- Maths Homework Project Year 4Document8 pagesMaths Homework Project Year 4afeuwbdev100% (1)
- Operations Management (Zheng) SU2016 PDFDocument9 pagesOperations Management (Zheng) SU2016 PDFdarwin12No ratings yet
- SABS Standards and Their Relevance to Conveyor SpecificationsDocument17 pagesSABS Standards and Their Relevance to Conveyor SpecificationsRobert Nicodemus Pelupessy0% (1)
- 4 1 Separation of VariablesDocument9 pages4 1 Separation of Variablesapi-299265916No ratings yet
- National Institute of Technology Calicut: Department of Computer Science and EngineeringDocument8 pagesNational Institute of Technology Calicut: Department of Computer Science and EngineeringArun ManuNo ratings yet
- E - Program Files (x86) - Schneider - sft2841 - sft2841 Serie 80 - Notice - en - Manual - Sepam - Series80 - Operation - ENDocument180 pagesE - Program Files (x86) - Schneider - sft2841 - sft2841 Serie 80 - Notice - en - Manual - Sepam - Series80 - Operation - ENJuan Cristóbal Rivera PuellesNo ratings yet
- ERA News Mar 23 - Final - 0Document10 pagesERA News Mar 23 - Final - 0Băltoiu Son AlisaNo ratings yet
- Advanced Long Range Proximity Reader PDFDocument1 pageAdvanced Long Range Proximity Reader PDFPhangkie RecolizadoNo ratings yet
- PDFDocument42 pagesPDFDanh MolivNo ratings yet
- Xpand!2 - User Guide - V1.1Document18 pagesXpand!2 - User Guide - V1.1JamesNo ratings yet
- Herbarium Specimen Preparation and Preservation GuideDocument9 pagesHerbarium Specimen Preparation and Preservation GuideJa sala DasNo ratings yet
- TOS - MathDocument4 pagesTOS - MathGeorge Ezar N. QuiriadoNo ratings yet
- 2013 Sunchaser Brochure PDFDocument12 pages2013 Sunchaser Brochure PDFKelly SimpsonNo ratings yet
- Surface Wettability of Paper (Angle-of-Contact Method) : Standard Test Method ForDocument4 pagesSurface Wettability of Paper (Angle-of-Contact Method) : Standard Test Method ForfadjarNo ratings yet
- Sheet 5 SolvedDocument4 pagesSheet 5 Solvedshimaa eldakhakhnyNo ratings yet
- 4.2 Force and Motion 1Document19 pages4.2 Force and Motion 1ammarsyahmiNo ratings yet
- Grade7Research 1st Quarter MeasuringDocument17 pagesGrade7Research 1st Quarter Measuringrojen pielagoNo ratings yet
- Block Ice Machine Bk50tDocument6 pagesBlock Ice Machine Bk50tWisermenNo ratings yet
- CSIR NET December 2019 Admit CardDocument1 pageCSIR NET December 2019 Admit CardDevendra Singh RanaNo ratings yet
- Vastu House PlanDocument187 pagesVastu House Planshilpa shahNo ratings yet
- QP 7721-Sobha-B+g+8-2town-Pahse IiDocument2 pagesQP 7721-Sobha-B+g+8-2town-Pahse IirajatNo ratings yet
- The World in Which We Believe in Is The Only World We Live inDocument26 pagesThe World in Which We Believe in Is The Only World We Live inYusufMiddeyNo ratings yet
- LPDocument5 pagesLPHeizyl ann VelascoNo ratings yet
- Public Authority CasesDocument11 pagesPublic Authority CasesAbhinav GoelNo ratings yet
- Develop, Implement and Maintain WHS Management System Task 2Document4 pagesDevelop, Implement and Maintain WHS Management System Task 2Harry Poon100% (1)
- K220 Accessories BrochureDocument6 pagesK220 Accessories Brochurehh8g9y6ggcNo ratings yet