You might also like
- Eee424 1 DC-DCDocument184 pagesEee424 1 DC-DCM.Feridun HızNo ratings yet
- E Ex 4350 Assignment 1Document2 pagesE Ex 4350 Assignment 1Madusanka Weebedda100% (1)
- Hu Hao Liu Yang Zhang JianhuaDocument8 pagesHu Hao Liu Yang Zhang JianhuaMagraoui AbdelkadirNo ratings yet
- A Circuit For All Seasons - Switched Capacitor IntegratorDocument3 pagesA Circuit For All Seasons - Switched Capacitor IntegratornsitdelhiNo ratings yet
- Comparison of Direct Voltage Control Methods of Multi-Terminal DC (MTDC) Networks Through Modular Dynamic ModelsDocument10 pagesComparison of Direct Voltage Control Methods of Multi-Terminal DC (MTDC) Networks Through Modular Dynamic ModelsRodrigo Teixeira PintoNo ratings yet
- Fuzzy Logic Based High Gain DC-DC Boost Converter For Microgrid ApplicationDocument7 pagesFuzzy Logic Based High Gain DC-DC Boost Converter For Microgrid ApplicationNishanthi BheemanNo ratings yet
- HVDC Transmission-1 ECE 7990 Assignment #1 Due: Wed Oct 2Document1 pageHVDC Transmission-1 ECE 7990 Assignment #1 Due: Wed Oct 2JagannathWijekoonNo ratings yet
- Modeling, Control and Simulation of A Chain Link Statcom in Emtp-RvDocument8 pagesModeling, Control and Simulation of A Chain Link Statcom in Emtp-RvBožidar Filipović-GrčićNo ratings yet
- 6.cross Regulation in Flyback Convertrers - SolutionsDocument6 pages6.cross Regulation in Flyback Convertrers - SolutionsMityaNo ratings yet
- Two Impedance-Network DC-DC Converters Based On Switched-Capacitor TechniquesDocument5 pagesTwo Impedance-Network DC-DC Converters Based On Switched-Capacitor TechniquesHussain K. SayedNo ratings yet
- EE254: D2 Buck ConverterDocument13 pagesEE254: D2 Buck ConverterNeil Hildick-SmithNo ratings yet
- Research On Dynamic Model and DecouplingDocument4 pagesResearch On Dynamic Model and DecouplingFelix GamarraNo ratings yet
- Expt 5.4Document6 pagesExpt 5.4Joel CatapangNo ratings yet
- Ch05 5 PDFDocument36 pagesCh05 5 PDFSabri BouloumaNo ratings yet
- Flyback Snubber Paper PDFDocument5 pagesFlyback Snubber Paper PDFG_naharNo ratings yet
- Online Monitoring Method For DC-Link Capacitor in ACDCAC ConverterDocument5 pagesOnline Monitoring Method For DC-Link Capacitor in ACDCAC ConverterWeiyang ZhouNo ratings yet
- Ichve 2008 4773986 PDFDocument4 pagesIchve 2008 4773986 PDFpedramNo ratings yet
- Lab Manual: Electrical Engineering Materials & Semiconductor Devices Lab (EC-317-F)Document41 pagesLab Manual: Electrical Engineering Materials & Semiconductor Devices Lab (EC-317-F)Ilavarasan TamizhNo ratings yet
- Multilevel Topologies. Josep PauDocument32 pagesMultilevel Topologies. Josep PauJose ManuelNo ratings yet
- Dynamic Modeling of A VSC-HVDC Converter: Markus Imhof, Student Member, IEEE, G Oran Andersson, Fellow, IEEEDocument6 pagesDynamic Modeling of A VSC-HVDC Converter: Markus Imhof, Student Member, IEEE, G Oran Andersson, Fellow, IEEEFelix GamarraNo ratings yet
- Combined CompensationDocument16 pagesCombined CompensationJayarajan Jayarajan C NNo ratings yet
- HW 3Document3 pagesHW 3Localized Prayer App0% (1)
- Assignment 04 Power ElectronicsDocument3 pagesAssignment 04 Power ElectronicsTayyab Hussain0% (1)
- Dual Boost Rectifier-Buck AC-AC PDFDocument5 pagesDual Boost Rectifier-Buck AC-AC PDFBui DaiNo ratings yet
- Developing A Laptop Power Adaptor For 12 V and 24 V Solar PV SourcesDocument6 pagesDeveloping A Laptop Power Adaptor For 12 V and 24 V Solar PV Sourcesaviti mushiNo ratings yet
- Pole-to-Ground Fault Analysis in Transmission Line of DC Grids Based On VSCDocument5 pagesPole-to-Ground Fault Analysis in Transmission Line of DC Grids Based On VSCCandy ChocolateNo ratings yet
- Current Mode Pi ControllerDocument19 pagesCurrent Mode Pi ControllersunitaNo ratings yet
- 300 Level Alternativev To PracticalDocument6 pages300 Level Alternativev To PracticalDjNo ratings yet
- A Comparative Analysis Bi-Directional DC-DC Converters: of Non-IsolatedDocument6 pagesA Comparative Analysis Bi-Directional DC-DC Converters: of Non-IsolatedTeam RaagNo ratings yet
- Lecture 19 - Single-Phase Squarewave InvertersDocument24 pagesLecture 19 - Single-Phase Squarewave InvertersAsif MuhammadNo ratings yet
- P 16 ProDocument1 pageP 16 Proconfui_463838409No ratings yet
- Gateeasy D To A PDFDocument3 pagesGateeasy D To A PDFShubham kumarNo ratings yet
- Digital To Analog Converter (Dac)Document3 pagesDigital To Analog Converter (Dac)Shimaa BarakatNo ratings yet
- Homework Assignment #1 Basic Converter Analysis Due at 10 Am MDT On Friday, September 7, 2017Document3 pagesHomework Assignment #1 Basic Converter Analysis Due at 10 Am MDT On Friday, September 7, 2017ollata kalanoNo ratings yet
- Abdelsalam 2015Document9 pagesAbdelsalam 2015gerson gomesNo ratings yet
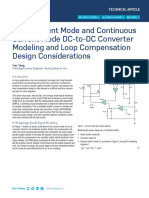
- Peak Current Mode and Continuous Current Mode DC To DC Converter Modeling2Document8 pagesPeak Current Mode and Continuous Current Mode DC To DC Converter Modeling2rajareddy235No ratings yet
- Basic Concept Operation and Control of HVDC Transmission SystemDocument74 pagesBasic Concept Operation and Control of HVDC Transmission Systempongpum100% (7)
- Chen Zhang, Xi-Ran ZHANG, Wei ZHU, Hui ZHONG and Yu SHIDocument5 pagesChen Zhang, Xi-Ran ZHANG, Wei ZHU, Hui ZHONG and Yu SHIMumuji BirbNo ratings yet
- Lab Manual STDocument68 pagesLab Manual STAlex MutiuNo ratings yet
- PDFDocument4 pagesPDFPranav GangwarNo ratings yet
- Digitally Controlled Interface Between Supercapacitor Energy Storage and DC LinkDocument5 pagesDigitally Controlled Interface Between Supercapacitor Energy Storage and DC LinkDipankar Mukherjee100% (1)
- HVDC ControlDocument74 pagesHVDC ControlKaran SinghaniaNo ratings yet
- Arc Flash Hazard Calculations in DC Systems R1Document36 pagesArc Flash Hazard Calculations in DC Systems R1DEVI PRASAD GREENSECURENo ratings yet
- Unit 2 - VLSI Design - WWW - Rgpvnotes.inDocument14 pagesUnit 2 - VLSI Design - WWW - Rgpvnotes.inPranav ChaturvediNo ratings yet
- 4-EC-IES-2013-Conventional Paper-IIDocument6 pages4-EC-IES-2013-Conventional Paper-IIDIGITAL BUSINESSNo ratings yet
- 15 Electric Circuit Analysis: If The Source Is... The Analysis Type Is..Document26 pages15 Electric Circuit Analysis: If The Source Is... The Analysis Type Is..Suresh NikalajeNo ratings yet
- FACTS ControlDocument22 pagesFACTS ControlJayarajan Jayarajan C NNo ratings yet
- 1 Ijeeerjun20171Document12 pages1 Ijeeerjun20171TJPRC PublicationsNo ratings yet
- Energies: Step-Up Partial Power DC-DC Converters For Two-Stage PV Systems With Interleaved Current PerformanceDocument11 pagesEnergies: Step-Up Partial Power DC-DC Converters For Two-Stage PV Systems With Interleaved Current PerformanceBiswarup ChatterjeeNo ratings yet
- EEE308 Midterm Fall 2023Document3 pagesEEE308 Midterm Fall 2023ANWAR SHADMANNo ratings yet
- Flyback PDFDocument11 pagesFlyback PDFlucianoNo ratings yet
- Electrical Technology 08082016Document46 pagesElectrical Technology 08082016AkNo ratings yet
- Analysis of Diode Clamped 3-Level Inverter in 2-Stage Solar PV SystemDocument6 pagesAnalysis of Diode Clamped 3-Level Inverter in 2-Stage Solar PV SystemRinku SatapathyNo ratings yet
- Analysis of Switched Inductor-Capacitor Hybrid Buck-SEPIC Two-Input DC-DC ConverterDocument5 pagesAnalysis of Switched Inductor-Capacitor Hybrid Buck-SEPIC Two-Input DC-DC ConvertervijaNo ratings yet
- Generalized Model of A Bidirectional DC-DC Converter: Nikolay Hinov, Dimitar Arnaudov and Dimitar PenevDocument5 pagesGeneralized Model of A Bidirectional DC-DC Converter: Nikolay Hinov, Dimitar Arnaudov and Dimitar PenevVenkatesan SwamyNo ratings yet
- Reading:: Electric Circuits (EET1411) HW11Document4 pagesReading:: Electric Circuits (EET1411) HW11Эсекьель ГутиеррезNo ratings yet
- Electrical Technology Lab: Dronacharya College of Engineering Khentawas, Gurgaon - 123506Document46 pagesElectrical Technology Lab: Dronacharya College of Engineering Khentawas, Gurgaon - 123506Shreyansh RajNo ratings yet
- Multistage Amplifier (CASCADE)Document58 pagesMultistage Amplifier (CASCADE)Junile Denampo100% (1)
- CEP Report (Linear Control System) - : Student Name: IDDocument10 pagesCEP Report (Linear Control System) - : Student Name: IDMudassir BhattiNo ratings yet
- Premium Corp Radio IRM PELJ2670 - 05142021Document8 pagesPremium Corp Radio IRM PELJ2670 - 05142021Wai MinNo ratings yet
- AS358MDocument15 pagesAS358Mantonio2065100% (1)
- GEH-6800 - Vol - I 2 PDFDocument204 pagesGEH-6800 - Vol - I 2 PDFJorge ContrerasNo ratings yet
- Sta SyllabiDocument6 pagesSta SyllabiRoshan RajuNo ratings yet
- Digital Logic Design Lesson 03 - Electrical & Electronic Symbols Fundamentals (2021)Document9 pagesDigital Logic Design Lesson 03 - Electrical & Electronic Symbols Fundamentals (2021)Jong Suk LeeNo ratings yet
- Digital Bandpass Modulation Techniques 2018Document11 pagesDigital Bandpass Modulation Techniques 2018harold cooperNo ratings yet
- Primary Vs Secondary Injection Testing For Circuit BreakersDocument9 pagesPrimary Vs Secondary Injection Testing For Circuit BreakersEmma TillanoNo ratings yet
- HiZ Auxiliary Units Catalogue SheetDocument12 pagesHiZ Auxiliary Units Catalogue SheetKasenNo ratings yet
- SIMS-201: What Is Bandwidth and How It Is UsedDocument25 pagesSIMS-201: What Is Bandwidth and How It Is UsedElena PocketNo ratings yet
- Applicable Systems: Futaba S-Fhss 2.4Ghz System and TM-FH RF Module Antenna Installation Precaution Usage PrecautionDocument2 pagesApplicable Systems: Futaba S-Fhss 2.4Ghz System and TM-FH RF Module Antenna Installation Precaution Usage PrecautiondanielNo ratings yet
- LSQ5 Man-0964 V3.1.0 enDocument48 pagesLSQ5 Man-0964 V3.1.0 enDiego Mondragon100% (1)
- Tentative: IPS Alpha Technology, LTDDocument19 pagesTentative: IPS Alpha Technology, LTDSetiawan Abdul RochimNo ratings yet
- NAd C425-UM Tuner - Multi-Language ManualDocument68 pagesNAd C425-UM Tuner - Multi-Language ManualPietertje58No ratings yet
- Common-Base ConfigurationDocument10 pagesCommon-Base ConfigurationRakin Mohammad SifullahNo ratings yet
- State-Of-The-Art: Dental Photocuring-A ReviewDocument14 pagesState-Of-The-Art: Dental Photocuring-A Reviewvictor manuel cuarantNo ratings yet
- Bangla BananDocument20 pagesBangla BananHasib MahmudNo ratings yet
- Practical Report Guideline EEE250Document8 pagesPractical Report Guideline EEE250MOHD ASYRAAF BIN SAIDINNo ratings yet
- Answer Key LUSIIIIDocument1 pageAnswer Key LUSIIIIJulcon Avanceña AraizNo ratings yet
- Guide To The EEV System: User ManualDocument28 pagesGuide To The EEV System: User ManualNikola NikolovNo ratings yet
- PR Electronics 4114Document83 pagesPR Electronics 4114Nishanth KallingentavidaNo ratings yet
- Thermocouple Connectors: Standard Specification ForDocument5 pagesThermocouple Connectors: Standard Specification ForteymurNo ratings yet
- Nikon D3200 24.2MP DSLR Camera Full Specifications: GeneralDocument5 pagesNikon D3200 24.2MP DSLR Camera Full Specifications: GeneralQlaypole OcholaNo ratings yet
- RV4PX310R-E2: Electrical SpecificationsDocument3 pagesRV4PX310R-E2: Electrical SpecificationsFernando Cuestas RamirezNo ratings yet
- 2M Led Lit-1Document4 pages2M Led Lit-1ShahzadNo ratings yet
- Spare Parts & Accessories Catalogue: Version 2.0 (28.02.2013)Document55 pagesSpare Parts & Accessories Catalogue: Version 2.0 (28.02.2013)Maintenance Can-Pack UkraineNo ratings yet
- Dec50143 PW4Document8 pagesDec50143 PW4Muhammad JazliNo ratings yet
- Legrand LYNCUS 2019 PDFDocument6 pagesLegrand LYNCUS 2019 PDFArun HangaragiNo ratings yet
- Duct Heaters With 3Ph Thyristor BMS Integration 51230523Document4 pagesDuct Heaters With 3Ph Thyristor BMS Integration 51230523proposals vertexNo ratings yet
- Lesson Plan - Electrical Materials and SuppliesDocument5 pagesLesson Plan - Electrical Materials and Supplieswels berdNo ratings yet