You might also like
- Jackson7 26Document3 pagesJackson7 26Rafael SerpaNo ratings yet
- Physical-Science11 Q1 MODULE-1 08082020Document27 pagesPhysical-Science11 Q1 MODULE-1 08082020Cristilyn Briones67% (3)
- C407X 12Document17 pagesC407X 12nigel agrippaNo ratings yet
- C407X 11Document14 pagesC407X 11nigel agrippaNo ratings yet
- C407X 10Document15 pagesC407X 10nigel agrippaNo ratings yet
- The Navier-Stokes Equations: 14.1 Conservation LawsDocument14 pagesThe Navier-Stokes Equations: 14.1 Conservation LawsCarlos MontúfarNo ratings yet
- Derivation of Navier Stokes Momentum EquationsDocument2 pagesDerivation of Navier Stokes Momentum EquationsFbgames StefNo ratings yet
- Solution for Chapter 23 causality and transformationsDocument8 pagesSolution for Chapter 23 causality and transformationsSveti JeronimNo ratings yet
- CAPS Technical Note: Acoustic Measurements Theory BasicsDocument26 pagesCAPS Technical Note: Acoustic Measurements Theory BasicslakaviyNo ratings yet
- Adm JournalDocument16 pagesAdm JournalOluwatobi IdowuNo ratings yet
- MIT Feedback Linearization LectureDocument5 pagesMIT Feedback Linearization LectureJosé Ignacio Fierro TravoNo ratings yet
- Lect 13Document14 pagesLect 13alejandrohdz_nNo ratings yet
- Cee235b Handout JacobianDocument4 pagesCee235b Handout JacobianNguyen DuyNo ratings yet
- C407X 03Document15 pagesC407X 03nigel agrippaNo ratings yet
- Karan Problem-1 Solution ElegantDocument6 pagesKaran Problem-1 Solution Elegantdarnit2703No ratings yet
- Derivation of The Lorenz EquationsDocument3 pagesDerivation of The Lorenz EquationsSteven ScottNo ratings yet
- Acoustic Admittance Prediction of Two Nozzle Part2Document3 pagesAcoustic Admittance Prediction of Two Nozzle Part2Abbas AmirifardNo ratings yet
- Space Curve GeometryDocument20 pagesSpace Curve GeometryMANIRAGUHA Jean PaulNo ratings yet
- 15 Differential Quadrature Method: U X, T) F (X, T, U (X, T), U X, T), U X, T) )Document9 pages15 Differential Quadrature Method: U X, T) F (X, T, U (X, T), U X, T), U X, T) )Reza SadeghiNo ratings yet
- Exact Solutions of The Space-Time Fractional EqualDocument7 pagesExact Solutions of The Space-Time Fractional EqualAreesha NoorNo ratings yet
- An Analytic Solution For Finding The Natural Frequency of A Nonlinear Oscillating SystemDocument9 pagesAn Analytic Solution For Finding The Natural Frequency of A Nonlinear Oscillating SystemSanda Pyae SoneNo ratings yet
- BL Chap1Document6 pagesBL Chap1Ashish GuptaNo ratings yet
- Vorticity and TurbulenceDocument34 pagesVorticity and TurbulenceGopal KrishanNo ratings yet
- t T T T 1 α α T 1 T 2 α T 2 t=0 3 1 2 3 3 1 1 2 3 3 1 2 3 α 3Document17 pagest T T T 1 α α T 1 T 2 α T 2 t=0 3 1 2 3 3 1 1 2 3 3 1 2 3 α 3phanvandu09No ratings yet
- Lecture 8. Uniqueness and The WronskianDocument5 pagesLecture 8. Uniqueness and The WronskianParatus AlcántaraNo ratings yet
- The Method of Characteristics Applied To Quasi-Linear PDEsDocument11 pagesThe Method of Characteristics Applied To Quasi-Linear PDEsAmit RaiNo ratings yet
- C407X 09Document15 pagesC407X 09nigel agrippaNo ratings yet
- 2.25 Advanced Fluid Mechanics: MIT Department of Mechanical EngineeringDocument4 pages2.25 Advanced Fluid Mechanics: MIT Department of Mechanical EngineeringIhab OmarNo ratings yet
- 18.034 Honors Differential Equations: Mit OpencoursewareDocument4 pages18.034 Honors Differential Equations: Mit OpencoursewareParatus AlcántaraNo ratings yet
- Solving Stochastic Differential Equations (SDEsDocument64 pagesSolving Stochastic Differential Equations (SDEsMzukisiNo ratings yet
- Qua Tern IonsDocument10 pagesQua Tern IonsPrashant SrivastavaNo ratings yet
- Notes On Solving The Black-Scholes EquationDocument20 pagesNotes On Solving The Black-Scholes EquationCaroline YanNo ratings yet
- Synchronousmotor PDFDocument27 pagesSynchronousmotor PDFJavier Caltzontzi HernandezNo ratings yet
- The Fokker-Planck Equation ExplainedDocument12 pagesThe Fokker-Planck Equation ExplainedslamNo ratings yet
- Communications On Pure and Applied Analysis Volume 6, Number 1, March 2007Document20 pagesCommunications On Pure and Applied Analysis Volume 6, Number 1, March 2007Mouhcine AsNo ratings yet
- M2an 1977 11 1 93 0Document16 pagesM2an 1977 11 1 93 0Zina SawafNo ratings yet
- Vectorized Matlab Codes For Linear Two-Dimensional ElasticityDocument16 pagesVectorized Matlab Codes For Linear Two-Dimensional ElasticityVincent CucumazzøNo ratings yet
- Double-Phase Parabolic Equations With Variable GroDocument32 pagesDouble-Phase Parabolic Equations With Variable GroChương Quách VănNo ratings yet
- Exact Solutions For Some Unsteady Flows of Generalized Second Grade Fluids in Cylindrical DomainsDocument10 pagesExact Solutions For Some Unsteady Flows of Generalized Second Grade Fluids in Cylindrical DomainsHina MeoNo ratings yet
- Existence and Uniqueness of Periodic SolutionsDocument18 pagesExistence and Uniqueness of Periodic SolutionsAntonio Torres PeñaNo ratings yet
- Dynamic Analysis Using Mode SuperpositionDocument12 pagesDynamic Analysis Using Mode SuperpositionRaul Vilcherrez MendietaNo ratings yet
- MIT2 25F13 SolutionStokes1Document4 pagesMIT2 25F13 SolutionStokes1Mehmet USTANo ratings yet
- Kinematics DynamicsDocument104 pagesKinematics DynamicsNadiaa AdjoviNo ratings yet
- LectureNotes39Nonlinear System.Document18 pagesLectureNotes39Nonlinear System.VinkbgkjgNo ratings yet
- The Jacobian MatrixDocument14 pagesThe Jacobian MatrixŞįśirŚärķeŕNo ratings yet
- C407X 07Document15 pagesC407X 07nigel agrippaNo ratings yet
- Fu YongqiangDocument17 pagesFu Yongqiang2428452058No ratings yet
- Boundary Feedback Stabilization of Boussinesq EquationsDocument22 pagesBoundary Feedback Stabilization of Boussinesq EquationsNo FaceNo ratings yet
- Convergence in Nonlinear Systems With A Forcing Term: 1 PreliminarsDocument4 pagesConvergence in Nonlinear Systems With A Forcing Term: 1 PreliminarsprofjnapolesNo ratings yet
- Kinematics v1Document23 pagesKinematics v1Alessio ScarabelliNo ratings yet
- The Fundamental Theorem of Calculus and The Poincaré LemmaDocument13 pagesThe Fundamental Theorem of Calculus and The Poincaré LemmasuperscriberNo ratings yet
- Lecture 10Document3 pagesLecture 10ThetaOmegaNo ratings yet
- DIP Lab 15Document2 pagesDIP Lab 15Abid UllahNo ratings yet
- Hesi 11Document61 pagesHesi 11Kj DeNo ratings yet
- Jackson Electrodynamics Chapter 1 SolutionDocument13 pagesJackson Electrodynamics Chapter 1 SolutionHayanNo ratings yet
- APPROXIMATION OF CONTROLS FOR LINEAR WAVE EQUATIONSDocument29 pagesAPPROXIMATION OF CONTROLS FOR LINEAR WAVE EQUATIONSSantiago Montaner GarcíaNo ratings yet
- Slides - Atomisation - and - Sprays L3Document21 pagesSlides - Atomisation - and - Sprays L3bouziane.boudraaNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Dynamical Systems Method for Solving Nonlinear Operator EquationsFrom EverandDynamical Systems Method for Solving Nonlinear Operator EquationsRating: 5 out of 5 stars5/5 (1)
- VCQ_SummerSchool_GianLucaGiorgiDocument216 pagesVCQ_SummerSchool_GianLucaGiorginigel agrippaNo ratings yet
- Kopi sheAnd_IDocument47 pagesKopi sheAnd_Inigel agrippaNo ratings yet
- C407X 09Document15 pagesC407X 09nigel agrippaNo ratings yet
- Quantum_Field_Theory_Anomalies_in_Condensed_MatterDocument133 pagesQuantum_Field_Theory_Anomalies_in_Condensed_Matternigel agrippaNo ratings yet
- C407X 01Document7 pagesC407X 01elsaordunaNo ratings yet
- C407X 02Document44 pagesC407X 02nigel agrippaNo ratings yet
- C407X 05Document4 pagesC407X 05nigel agrippaNo ratings yet
- On The Role of Potentials in The Aharonov-Bohm Effect: PACS Numbers: 03.65.-w, 03.65.Vf, 03.65.ta, 03.65.udDocument4 pagesOn The Role of Potentials in The Aharonov-Bohm Effect: PACS Numbers: 03.65.-w, 03.65.Vf, 03.65.ta, 03.65.udnigel agrippaNo ratings yet
- Global Solution of The Electromagnetic Field-Particle System of EquationsDocument17 pagesGlobal Solution of The Electromagnetic Field-Particle System of Equationsnigel agrippaNo ratings yet
- Trends in Maternal Mortality: Executive SummaryDocument16 pagesTrends in Maternal Mortality: Executive SummarykansaNo ratings yet
- Troubleshooting Edge Quality: Mild SteelDocument14 pagesTroubleshooting Edge Quality: Mild SteelAnonymous U6yVe8YYCNo ratings yet
- Sump Pumps: Single Channel Soft Solids Handling Sewage PumpDocument2 pagesSump Pumps: Single Channel Soft Solids Handling Sewage PumpMohammad ZeeshanNo ratings yet
- Cultural Dimensions & EthnocentrismDocument38 pagesCultural Dimensions & EthnocentrismKatya Alexis SalitaNo ratings yet
- Einas Mansour - Curriculum VitaeDocument3 pagesEinas Mansour - Curriculum VitaeEinas MansourNo ratings yet
- Bridge Superstructure DesignDocument276 pagesBridge Superstructure Designrenzo wilber bernedo beltranNo ratings yet
- Analysis of Wood Bending PropertiesDocument11 pagesAnalysis of Wood Bending Propertiesprasanna020391100% (1)
- Pate, M. B., Evaporators and Condensers For Refrigeration and Air-Conditioning Systems, in Boilers, Evaporators andDocument1 pagePate, M. B., Evaporators and Condensers For Refrigeration and Air-Conditioning Systems, in Boilers, Evaporators andpete pansNo ratings yet
- 2.5 PsedoCodeErrorsDocument35 pages2.5 PsedoCodeErrorsAli RazaNo ratings yet
- TSSA Fuels Safety High Pressure Piping Code, TSSA HPP-2017 November 2017Document7 pagesTSSA Fuels Safety High Pressure Piping Code, TSSA HPP-2017 November 2017Manoj SaralayaNo ratings yet
- Scope of WorkDocument4 pagesScope of WorkMathivanan AnbazhaganNo ratings yet
- Apollo System Engineering Manual. Environmental Control SystemDocument137 pagesApollo System Engineering Manual. Environmental Control Systemjackie_fisher_email8329100% (2)
- Laser Light PriceDocument5 pagesLaser Light Priceluis palominoNo ratings yet
- LCD LG (M17,1917S-BNN E)Document34 pagesLCD LG (M17,1917S-BNN E)Ion IonutNo ratings yet
- TwinCAT 3 Booklet PDFDocument17 pagesTwinCAT 3 Booklet PDFAlaeddin Ben HammedNo ratings yet
- Solution Manual For Macroeconomics 13th Edition Michael ParkinDocument24 pagesSolution Manual For Macroeconomics 13th Edition Michael ParkinBonnieGoodmanxajb100% (45)
- Clare Foster CVDocument2 pagesClare Foster CVfostressNo ratings yet
- OM Sample QPDocument8 pagesOM Sample QPChandra ShekarNo ratings yet
- Frontal - Cortex Assess Battery FAB - ScaleDocument2 pagesFrontal - Cortex Assess Battery FAB - Scalewilliamsa01No ratings yet
- Nozomi Networks Smart Polling Data SheetDocument4 pagesNozomi Networks Smart Polling Data SheetFlávio Camilo CruzNo ratings yet
- Generac Generac CAT MTU Cummins KohlerDocument3 pagesGenerac Generac CAT MTU Cummins KohlerJuly E. Maldonado M.No ratings yet
- Theoretical Foundation in Nursing: LESSON 8Document4 pagesTheoretical Foundation in Nursing: LESSON 8Gabriel SorianoNo ratings yet
- 16656561931665656193FinancialModellingProfessional 1 (1) CompressedDocument17 pages16656561931665656193FinancialModellingProfessional 1 (1) CompressedDharmik UndaviyaNo ratings yet
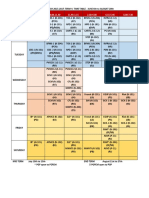
- Term 4 Time Table & Exam Schedule.Document4 pagesTerm 4 Time Table & Exam Schedule.Anonymous FD3MCd89ZNo ratings yet
- CHAPTER 9 Microsoft Excel 2016 Back ExerciseDocument3 pagesCHAPTER 9 Microsoft Excel 2016 Back ExerciseGargi SinghNo ratings yet
- Species - Age of RebellionDocument10 pagesSpecies - Age of RebellionLeo VieiraNo ratings yet
- Mitch Fryling and Linda Hayes - Motivation in Behavior Analysis A Critique PDFDocument9 pagesMitch Fryling and Linda Hayes - Motivation in Behavior Analysis A Critique PDFIrving Pérez Méndez0% (1)
- Agile Assignment 2Document2 pagesAgile Assignment 2Sameen ShakeelNo ratings yet
- Class Test Dec 10Document6 pagesClass Test Dec 10trudes100No ratings yet