You might also like
- Lecture-2 Vector Spaces-21Document30 pagesLecture-2 Vector Spaces-21waqar soomroNo ratings yet
- Vectorspace 2Document91 pagesVectorspace 2Ujjwal GuptaNo ratings yet
- Lecture 4Document51 pagesLecture 4Trần Hoàng ViệtNo ratings yet
- Lecture4, Vector SpaceDocument57 pagesLecture4, Vector SpaceHisham MostafaNo ratings yet
- Vector Spaces: Elementary Linear Algebra R. Larson (8 Edition)Document136 pagesVector Spaces: Elementary Linear Algebra R. Larson (8 Edition)shoaibsaleem001No ratings yet
- Vector Spaces SlidesDocument23 pagesVector Spaces SlidesMuhammad AnasNo ratings yet
- Determinants (CTD) : Cramer's Rule (Section 2.3)Document9 pagesDeterminants (CTD) : Cramer's Rule (Section 2.3)asahNo ratings yet
- 7-Vector Spaces-01-02-2024Document95 pages7-Vector Spaces-01-02-2024YashNo ratings yet
- Mathematics Ii: MATH F112 Department of Mathematics BITS Pilani K K Birla Goa CampusDocument27 pagesMathematics Ii: MATH F112 Department of Mathematics BITS Pilani K K Birla Goa CampusJayant ChaudharyNo ratings yet
- Chapter 5 Chapter ContentDocument23 pagesChapter 5 Chapter ContentMeetu KaurNo ratings yet
- Vectorspace 2Document91 pagesVectorspace 2shivani100% (1)
- MA1513 Chapter 2 Lecture NoteDocument40 pagesMA1513 Chapter 2 Lecture NoteJustin NgNo ratings yet
- CH 4Document107 pagesCH 4RainingGirlNo ratings yet
- Chapter 2Document35 pagesChapter 2Jihan KwonNo ratings yet
- Chapter 4 PDFDocument92 pagesChapter 4 PDFVivek Kumar100% (1)
- MA1002D Tutorial 2Document3 pagesMA1002D Tutorial 2raja babuNo ratings yet
- Chapter 1 Introduciton To VectorsDocument9 pagesChapter 1 Introduciton To VectorsLeepsteer LooNo ratings yet
- Linear Algebra - Exercise 1Document2 pagesLinear Algebra - Exercise 1Vishal GaurNo ratings yet
- Vector Spaces: 4.1 Vectors in RDocument54 pagesVector Spaces: 4.1 Vectors in RIper PeterNo ratings yet
- LA Homework2Document2 pagesLA Homework2jayson18819733699No ratings yet
- Week7 9 PDFDocument16 pagesWeek7 9 PDFBrian HaraNo ratings yet
- Linear Algebra Vector - SpaceDocument98 pagesLinear Algebra Vector - SpaceEngr Suleman Memon100% (1)
- 12.4 The Cross Product / Vector: R S R S RsDocument6 pages12.4 The Cross Product / Vector: R S R S RsNabilahJasmiNo ratings yet
- Chapter 3Document154 pagesChapter 3Lucas WeeNo ratings yet
- Lecture 4Document29 pagesLecture 4mjiabir12007No ratings yet
- Chapter 3Document155 pagesChapter 3andyNo ratings yet
- Chapter Foure Vector Space: Asma Alramle November 21, 2020Document8 pagesChapter Foure Vector Space: Asma Alramle November 21, 2020Esmaeil AlkhazmiNo ratings yet
- ProblemSet 01Document3 pagesProblemSet 01Soumya Ranjan SahooNo ratings yet
- ch03 - Part2 - RealVector v2 (42) - DONEDocument42 pagesch03 - Part2 - RealVector v2 (42) - DONEHsinminNo ratings yet
- Vector SpacesDocument6 pagesVector Spacesas_5kNo ratings yet
- Vectors in RNDocument45 pagesVectors in RNKalaniNo ratings yet
- Vector I 2015Document11 pagesVector I 2015Purawin SubramaniamNo ratings yet
- K01603 - 20190413172609 - Lecture Note - Chapter 3 PDFDocument32 pagesK01603 - 20190413172609 - Lecture Note - Chapter 3 PDFSHARIFAH NUR ARISHIA WAN HAZAMINo ratings yet
- Tutorial 1Document2 pagesTutorial 1Sodisetty Rahul KoushikNo ratings yet
- Homework 1Document5 pagesHomework 1Stacy TashNo ratings yet
- Fall2013math290lecture17 PDFDocument28 pagesFall2013math290lecture17 PDFGetachew TadesseNo ratings yet
- Lecture 6Document39 pagesLecture 6Tùng Nguyễn LâmNo ratings yet
- Topic 1.1: Vector: 1. Introduction To Vectors Geometric VectorsDocument13 pagesTopic 1.1: Vector: 1. Introduction To Vectors Geometric VectorsJeevan KrishnanNo ratings yet
- Tutorial 2Document4 pagesTutorial 2Prinshu RawatNo ratings yet
- DiscreteDocument43 pagesDiscreteShahd Mamdouh Mostafa AbdelazizNo ratings yet
- Multivariable Calculus Math 21a: Harvard University Spring 2004 Oliver KnillDocument64 pagesMultivariable Calculus Math 21a: Harvard University Spring 2004 Oliver KnillTshegofatso Shroedinger TshipmaticNo ratings yet
- Examples Done On Orthogonal ProjectionDocument79 pagesExamples Done On Orthogonal ProjectionAbraham JyothimonNo ratings yet
- VectorsDocument26 pagesVectorsAyase YOASOBINo ratings yet
- Vectors in Euclidean SpaceDocument11 pagesVectors in Euclidean SpaceAnish PokharelNo ratings yet
- CH 5 Vec & TenDocument40 pagesCH 5 Vec & TenDawit AmharaNo ratings yet
- Vectorspace PDFDocument8 pagesVectorspace PDFTatenda BizureNo ratings yet
- Problems and Solutions in Differential Geometry and ApplicationsDocument125 pagesProblems and Solutions in Differential Geometry and ApplicationsseimomNo ratings yet
- LINEAR ALGEBRA - DPP 05 (Of Lec 07) - Shodh 2.0 Batch For CSIR NET - GATE Mathematical SciencesDocument5 pagesLINEAR ALGEBRA - DPP 05 (Of Lec 07) - Shodh 2.0 Batch For CSIR NET - GATE Mathematical SciencesSayudh Shamik JanaNo ratings yet
- LarLinAlg8 LecturePPTs 04 01Document40 pagesLarLinAlg8 LecturePPTs 04 01Dump AccountNo ratings yet
- Linear Algebra VectorSpacesDocument38 pagesLinear Algebra VectorSpacesno nameNo ratings yet
- Chapter5 (5 1 5 3)Document68 pagesChapter5 (5 1 5 3)Rezif SugandiNo ratings yet
- Linear Algebra Assignment 3Document35 pagesLinear Algebra Assignment 3Himangshu KalitaNo ratings yet
- Linear Algebra, 2Nd Edition - Kenneth Hoffmann and Ray Kunze 20181106233255Document2 pagesLinear Algebra, 2Nd Edition - Kenneth Hoffmann and Ray Kunze 20181106233255Shallu NandwaniNo ratings yet
- MATH 304 Linear Algebra Basis and DimensionDocument16 pagesMATH 304 Linear Algebra Basis and DimensionsparkshockNo ratings yet
- Practice Questions Vec Norm CorrDocument1 pagePractice Questions Vec Norm CorrirfanNo ratings yet
- T1A/T1B, Hmcheungae Math 2121 Tutorial 8 November 1, 2018Document9 pagesT1A/T1B, Hmcheungae Math 2121 Tutorial 8 November 1, 2018Toby ChengNo ratings yet
- Practice Questions VectorandnormsDocument1 pagePractice Questions VectorandnormsirfanNo ratings yet
- Tutorial No 07Document2 pagesTutorial No 07Alkgema StoresNo ratings yet
- Euclidean Vector SpacesDocument88 pagesEuclidean Vector SpacesRezif SugandiNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- SS Assignment - IIIDocument1 pageSS Assignment - IIIriniprem9444No ratings yet
- MI Unit VDocument121 pagesMI Unit Vriniprem9444No ratings yet
- EMT Module 6Document27 pagesEMT Module 6riniprem9444No ratings yet
- 12-AnalysisSequentialCircuits - PrintDocument6 pages12-AnalysisSequentialCircuits - Printriniprem9444No ratings yet
- Discrete FourierDocument7 pagesDiscrete Fourierriniprem9444No ratings yet
- Cariño Vs CariñoDocument1 pageCariño Vs CariñoEmmanuel C. DumayasNo ratings yet
- Q2 Grade 8 Music DLLDocument13 pagesQ2 Grade 8 Music DLLBee Gee GeeNo ratings yet
- Ars Quatuor Coronatorum v21 1000057345Document496 pagesArs Quatuor Coronatorum v21 1000057345Δημητρης Ιατριδης0% (1)
- 7 Lessons From The Richest Man in BabylonDocument7 pages7 Lessons From The Richest Man in Babylondchandra15No ratings yet
- Module 25 Hospital Hygiene Infection Control and HCWM - EnglishDocument38 pagesModule 25 Hospital Hygiene Infection Control and HCWM - Englishkhuzaima9No ratings yet
- NikhilDocument4 pagesNikhilAditya JoshiNo ratings yet
- Food Drink Europe Memoria 2015Document28 pagesFood Drink Europe Memoria 2015intspainNo ratings yet
- Chapter02 Core C# Programming ConstructDocument65 pagesChapter02 Core C# Programming ConstructNguyễn Ngọc Liệu100% (1)
- Lecture 1 - Part 1 - Introduction To ECE 105Document12 pagesLecture 1 - Part 1 - Introduction To ECE 105homamhomarNo ratings yet
- Art Therapy and PsychoticDocument12 pagesArt Therapy and PsychoticcacaNo ratings yet
- FLEGGSDocument13 pagesFLEGGSJasper MuvezwaNo ratings yet
- Blood Donor AppDocument5 pagesBlood Donor AppPriya DarshiniNo ratings yet
- 5 Coolest Pinoy Inventions You HavenDocument6 pages5 Coolest Pinoy Inventions You HavenChiela BagnesNo ratings yet
- YOGA MudrasDocument3 pagesYOGA Mudrasviswanath venkiteswaranNo ratings yet
- Jade Vine: Summative Test in Organization and ManagementDocument4 pagesJade Vine: Summative Test in Organization and ManagementJemuel CinsoNo ratings yet
- CCRN PCCN Review Hematology ImmunologyDocument7 pagesCCRN PCCN Review Hematology ImmunologyGiovanni MictilNo ratings yet
- Word Swaping Questions For Bank Clerk Prelims Exam: WWW - Guidely.inDocument9 pagesWord Swaping Questions For Bank Clerk Prelims Exam: WWW - Guidely.inAnku GodaraNo ratings yet
- Assignment 2 T1 2022Document2 pagesAssignment 2 T1 2022Munawwar MohamedNo ratings yet
- Surat Pengenalan Fakulti FirstSolarDocument4 pagesSurat Pengenalan Fakulti FirstSolarMohd Izzat Abd GhaniNo ratings yet
- IKO968959021 Auth LetterDocument3 pagesIKO968959021 Auth LetterGero0412No ratings yet
- LM Drilling Riser Protection FLDRDocument4 pagesLM Drilling Riser Protection FLDRAderobaki GbengaNo ratings yet
- Chapter 1: Project Introduction 1.1 The ProjectDocument5 pagesChapter 1: Project Introduction 1.1 The ProjectGeanno PolinagNo ratings yet
- DOJAC Accomplishment Report - UpdatedDocument47 pagesDOJAC Accomplishment Report - UpdatedAllen GeronimoNo ratings yet
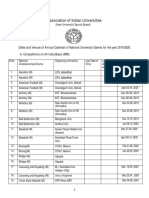
- Sports Calendar 2019-20 PDFDocument10 pagesSports Calendar 2019-20 PDFSailajaNo ratings yet
- Anaphy Possible ExamDocument7 pagesAnaphy Possible ExamZyra Kim ResareNo ratings yet
- Pe v. PeDocument2 pagesPe v. PeElayne MarianoNo ratings yet
- DeVry ACCT 434 Final Exam 1 100% Correct AnswerDocument9 pagesDeVry ACCT 434 Final Exam 1 100% Correct AnswerDeVryHelpNo ratings yet
- Chapter-3 PTD NewDocument34 pagesChapter-3 PTD NewGODNo ratings yet
- HarpDocument9 pagesHarpSergio Miguel MiguelNo ratings yet
- AP Eazy Tiled A4Document33 pagesAP Eazy Tiled A4Tanvir DaphedarNo ratings yet