Volume 8, Issue 11, November – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Modelling a Smart Structure with Sliding Mode
Controller for Vibration Suppression
Sunith. S1 R. Lethakumari2
Dept. of Electrical Engineering Dept. of Electrical Engineering
College of Engineering Trivandrum College of Engineering Trivandrum
Trivandrum, Kerala, India Trivandrum, Kerala, India
Abstract:- Modern satellites need sophisticated piezoelectric, piezoceramics, PVDF, PZT, etc. can be used to
instruments for remote sensing with microlevel accuracy. produce a secondary vibration against the previous one due to
This paper features the modelling and design of a force [4][5]. This causes a destructive interference with
cantilever beam made of aluminium with piezoelectric original response of the system which intact a result of the
sensor and actuator at its free end and a comparative primary source of vibration.
study of the sensor output voltage with a PID controller as
well as Sliding Mode Controller is being done. In earlier The theoretical background can be explained by Euler
methods self-tuning sensors and actuators were used. But Bernoulli beam theory and Timoshenko Beam theory.
it requires coating of the entire beam with piezo film Modelling, controlling and implementation of smart structures
which is much complex. Also, the output of the sensor will using piezo materials can be explained only by using these
not be satisfactory. Since the accuracy is much important two fundamental theories. For classical beam model in Euler-
in remote sensing applications, separate piezoelectric Bernoulli beam theory the assumption is that before and after
sensors and piezoelectric actuators are used by replacing bending, the plane cross section of the beam remains plane
the piezo film coated beam. This work includes design of and normal to the neutral axis [1]. Since the axial
PID and SMC for suppressing the vibration with in displacement and shear force are neglected in Euler Bernoulli
desirable limits against an external disturbance to the theory, the results may be slightly inaccurate. For overcoming
system. these limitations Timoshenko Beam theory is used, as it
considers the effect of axial and shear displacements [2][3].
I. INTRODUCTION
In Timoshenko Beam theory, cross sections remain
Active vibration control can be considered as one of the plane and rotate about the same neutral axis as in Euler
major problems in the study of structures. The best way to Bernoulli model, but do not remain normal to the deformed
solve this problem is by making the structure smart longitudinal axis. The deviation from the normal structure
intelligent, self-controlling and adaptive. The automatic
modification of the systems physical structure is the key point
in active vibration control. The importance of suppressing the
vibrations is that it may otherwise affect the stability and
performance of the structure. For achieving this objective, the
need of a smart structure arises. Smart structure means a
structure which is self-contained such that it should have the
strength to withstand dynamic forces and disturbances in
order to minimize the amount of vibration [1]. Being a smart
structure most preferably it should be cheaper structures
exhibiting superior performance. A system designer’s major
challenge occurring in the field of vibration control. As an
optimal solution to this problem sensor’s and actuators to be Fig 1 A Regular Flexible Beam
integrated with the structure and hence it can be called as a
smart structure. The advantage of using piezoelectric
materials are, they are capable of altering response of the
structure through sensing, actuation and control. These
piezoelectric sensors and actuators can be directly embedded
in to the host structure by mounting it to its surface.
The vibration control system mainly consists of four
parts, a sensor, actuator, controller and the system. When an
external force is applied to a simple cantilever beam it will
undergo vibrations. These vibrations should be suppressed. To
know the amount of deformation first measure the Fig 2 A Small Flexible Beam with Piezo Sensor and Actuator
displacement using piezo sensors and actuators like Placed at the Free end
IJISRT23NOV2023 www.ijisrt.com 1603
Volume 8, Issue 11, November – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Is produced by a transverse shear that is assumed to be Timoshenko Beam theory is considered superior for precisely
constant over the cross section. Total slope of the beam model predicting the beam response.[5][6]
is contributed by bending(θ) and other due to shear(β) . Hence
II. MATHEMATICAL MODELLING OF SMART BEAM
Consider a flexible Aluminium cantilever beam as shown in figure 1. The piezo electric sensor and actuator are bonded at the
tip of the beam as shown in figure 2.
Table 1 Physical Parameters
Parameter (With Units) Symbol Numerical Values
Total Length(m) lb 0.3
Width(m) b 0.024
Density(kg/m3) δb 8030
Young’s Modulus (GPa) Eb 193.06
Constants used in C∗ α,β 0.001,0.0001
Thickness(mm) tb 1
Finite Element Modelling of beam Element
The x-axis is considered as the longitudinal axis of the regular beam element as shown in figure 1. The beam element has
constant modulus of elasticity, moment of inertia, length and mass density. The displacement relations of the regular beam in x,y,z
direction will be [Friedman and Kos Mataka, 1993]
Table 2 Properties of the (PZT) Piezo Sensor/Actuator
Parameter (With Units) Symbol Numerical Values
Length(m) lp 0.075
Width(m) b 0.024
Thickness(mm) ta,ts 0.5
Young’s Modulus(GPa) Ep 68
Density(kg/m3) δp 7700
Piezo stress constant (V mN−1) g31 10.5 × 10−13
Piezo strain constant (m/V ) d31 125 × 10−12
A is the area of cross-section of the beam, K is the shear
coefficient which is equal to [ cooper, 1966]. Total kinetic
…………1 energy can be written as
……………………………..…2
…………………….3
…………….(5)
Where w is the transverse displacement along z axis, θ
is the time dependent rotation of the beam about y-axis , u is
Where δ is the mass density. The total work due to
the axial displacement along x-axis, v is the lateral
external forces in the system is given by
displacement along y-axis, which is equal to zero. Also w1,θ1
and w2,θ2 are the DOF’s at the fixed end and free end
respectively. θ2 is measured in clockwise direction and
calculated according to the sensor output voltage as it is
being proportional with the displacement in y direction. The
total slope of the beam is constituted by θ(x) and β(x) , which
is bending and shear stress respectively. The strain energy of ………………………….(6)
the beam element is given by
Where qd is distributed force at the free end and m represent
moment along the beam length.
………………….(7)
…4
IJISRT23NOV2023 www.ijisrt.com 1604
Volume 8, Issue 11, November – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Substituting the values of strain energy from Eq.(4),
kinetic energy from Eq.(5) and external work done from
Eq.(6)in Eq.(7) and integrating by parts , the result obtained ……………………………………………(15)
will be the differential equations of motion of a general
shaped beam modelled with Timoshenko beam theory as FEM of Piezoelectric Beam Element
The regular beam with piezo sensor and actuator is
shown in figure 2. The bottom layer acts as the sensor and
upper layer will be the actuator. Due to very thin size the
effect of the shear is negligible in these piezo patches. So
………….....(8) piezo modelling is purely based on Euler-Bernoulli beam
theory. From [1][2] the mass matrix is given by
………...…..(9)
For static case having no external force applied to the
beam RHS of Eq.(8) and Eq.(9) will be zero, then differential
equation of motion will be
….16
……………….………(10) Where δp is the mass density of piezoelectric beam
element, Ap is the area of the piezoelectric patch and lp is the
length of piezoelectric patch. The stiffness matrix can be
obtained as [1][2]
………….……(11)
The Eq.(11) obeys Timoshenko beam theory only when
the polynomial order for w is selected one order higher than
the polynomial order for θ[Manjunath and Bandyopadhyay,
2005] For the modelling of regular beam in FEM method the
inevitable thing is the mass matrix of the beam , which will
be the sum of rotational mass and translational mass and is
given by,
...(17)
Where Ep is the modulus of elasticity of piezo material
and Ip is the moment of inertia of the piezoelectric layer.
……12
Piezoelectric Sensors and Actuators
Where [Nw], [Nθ] are shape functions from [1] and from
this by integrating we get
Piezoelectric Sensor Equation
…………………………………..13 D = dT + εTE……………………………………………………(18)
The next foremost important thing is the stiffness Where T is the Stress, E is the electric field and S will
matrix, which is the sum of shear stiffness and bending be the Strain. D can be considered as the di-electric
stiffness and is given by displacement. The other parameters are and d which is
the permittivity of the medium, compliance of the medium
and piezoelectric constant respectively.
The strain in the structure is calculated by using the
direct piezoelectric equation. The strain acting on the sensor
will be directly proportional to the electric displacement
developed on the sensor surface, since no external field is
applied to the sensor layer. If we assume that the poling is
…..14 done along the z-direction of the sensor. i.e. along the
thickness direction of the sensor. Then the electric
Where φ is the ratio of the beam bending stiffness to displacement can be written as,
shear stiffness and is given by
IJISRT23NOV2023 www.ijisrt.com 1605
Volume 8, Issue 11, November – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Dynamic Equation and State Space Model of the Smart
………………………..….(19)
Structure
The dynamic equation can be found out from the
Where Ep is the young’s modulus, e31 is the piezo
matrices in Eq.(13), Eq.(14), Eq(16) and Eq(17). Hence the
electric stress/charge constant and x is the strain of the testing
assembled matrices M and K are obtained. The equation of
structure at a point on the beam. The total charge developed
motion will be
on the sensor surface Q(t) will be the summation of all point
charges developed in the sensor layer. The current developed
Mq¨+ Kq = fext + fctrl = ft……………………………………….(28)
is given by
Where M is the global mass matrix, K is the global
stiffness matrix ,fext is the external force applied to the beam,
fctrl is the controlling force by the actuator. the generalised
………………………...(20) coordinate transformation is given by q = Tg, which gives the
first two vibratory modes. T is the modal matrix containing
Where is the second spacial derivative the eigen vectors representing the first two vibratory modes.
of the mode shape function of the beam. Open circuit voltage q and g are the generalised and principal co-ordinates
V s can be obtained from the current with the help of a signal respectively. Now Eq.(28) becomes
conditioning device with gain Gc and applies to an actuator
with a controller gain Kc. hence actuator input voltage will be MTg¨ + KTq = fext + fctrl…………………………………….…(29)
Multiplying by TT on both sides and simplifying we get
………………………...(21)
………………….…(30)
Piezoelectric Actuator Equation
S = SET + dE……………………………………………………(22)
Strain developed by the application of electric field Ef ………...……….(31)
on actuator layer is given by
Hence from Eq,(31) 𝑥1̇ = 𝑥3 , 𝑥2̇ = 𝑥4 which can be further
simplified as
……………………….………..(23)
The stress developed in the thickness direction will be ..(32)
……………………………………….(24)
The resultant moment is given by
MA = Epd31𝑧̅𝑉 𝑎 (𝑡)………………………………………..(25)
Where 𝑧̅ is the distance between neutral axis and
piezoelectric layer of the beam. The control force applied by
the actuator is given by
Fig 3 System Block Diagram with PID and SMC
……………………..…..(26) 𝑋̇˙ = Ax(t) + Bu(t) + Er(t)………………………………(33)
[Nθ]T is the first spacial derivative of mode shape Sensor voltage is taken as the output of the system
function of the beam. If an external impulse disturbance acts
on the beam then total force 𝑥1
𝑥2
ft = fext + fctrl………………………………………...………..(27) 𝑦(𝑡) = [0 𝑃𝑇 𝑇] [𝑥3 ] ………………………………..(34)
𝑥4
y(t) = CT x(t) + Du(t)……………………………….……..(35)
IJISRT23NOV2023 www.ijisrt.com 1606
Volume 8, Issue 11, November – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
From Eq.(33) and Eq.(35), we get state equation and the Where w = −ksgn(σ) and let tr = 0.2s
output equation with
∴ w = −[δ + D]sgn(σ)…………………………………..…(44)
In the sliding phase from Eq.(42) the control signal by the
………..(36)
SMC will be
………...(37) u = −[CTAx(t)[CTB]−1] − [δ + D]sgn(σ)……………….….(45)
Where r(t), u(t), A, B, C, D, E, x(t), y(t) represents the IV. SIMULATION AND RESULTS
external force input, the control input, system matrix, input
matrix, output matrix, transmission matrix, external load Open Loop Beam Response
matrix, state vector and the system output (sensor output). When a step change is given at a time t=0 from 0 to 2,
the cantilever beam experiences a fixed force at the free end.
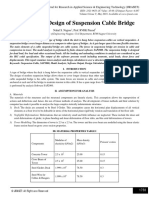
III. CONTROL SYSTEM DESIGN Due to this external force the sensor output voltage deflects
in the range 0 to 2.8 × 10−5v. The open loop disturbance
PID Controller voltage is measured as 1.6 × 10−5v and persist through out in
The block diagram of a specified PID controller in a the system after 0.3 s of initial vibrations.
closed loop system is shown in figure 3. The Output of the
PID controller is given by following equations. Closed Loop Beam Response with PID Controller
When a PID controller is placed with values of Kp = -
1.46, Ki = -6.04, Kd = -2.817, under the same external load
……………….(38) change, the sensor output voltage will deflect from 0 to1.42 ×
10−14 and settles down to 0.8 × 10−14 in 0.235 s. From this
The transfer function of a PID controller is result it is being clear that external persisting load is being
reduced by the controller action through the actuator.
…………………..(39)
…………………………………...(40)
In the design of PID controller for active vibration
control of beam, three parameters are specified: proportional
gain, integral gain and derivative gain. The performance of
the controller directly depends on these parameters. In order
to obtain the desired system response, these parameters are
optimally adjusted by fine tuning in MATLAB. From this the
optimal values of Kp, Ki and Kd are respectively obtained as -
1.4,-6.04 and -2.817.
Fig 4 Open Loop Response of the Beam Without Controller
Sliding Mode Controller
From the output Eq.(35), choosing y4 as the sliding
variable and differentiating
y(˙t) = CT [Ax(t) + Bu(t) + Er(t)]………………………….(41)
Multiply by [CTB]−1 and taking y(˙t) = 0
u = −[CT Ax(t)[CTB]−1] +………………………………….(42)
SMC has two phases called Reaching phase and sliding
1
Phase. Let 𝑣 = 𝜎 2 be the chosen Lyapunov function at
2
the reaching phase ∴ v˙ = σσ˙ = −δ|σ| where σ is the sliding
variable
v˙ = σ[CTAx(t)[CTB]−1] + w = σw + σD……………………..(43) Fig 5 Closed Loop Response of the Beam with PID
Controller
IJISRT23NOV2023 www.ijisrt.com 1607
Volume 8, Issue 11, November – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Closed Loop Beam Response with Sliding Mode [4]. Hwang W., and Park H.C., ”Finite element modeling
Controller of piezoelectric sensors and actuators,” AIAA Journal,
By introducing a sliding mode controller in place of Volume 31 Issue 5, Pages 930-937, 1993
PID controller further reduces the external load to 4 × 10−16 [5]. Young-Hun Lim, Senthil Gopinathan V., Vasundara
and settles down with in 0.2 s. Our aim was to completely Varadhan V., and Vijay Varadan K., ”Finite element
eliminate the external load and up to a far extent it is being simulation of smart structures using an optimal output
achieved and the sensor output voltage almost equals to zero feedback controller for vibration and noise control,”
with in the response time assigned to the controller. Journal of Smart Materials and Structures, Volume 8
, Pages 334-337, 1999
V. CONCLUSION
The Cantilever beam with a piezo sensor and piezo
actuator at its free end is modelled and applied a fixed
external disturbance. The beam output deflection is measured
with a piezo sensor with voltage as output. Our aim is to
bring back the cantilever beam to null position by eliminating
the applied disturbance. For that a piezo actuator is placed
and is controlled by a controller. In this paper a comparison
between a PID controller and Sliding mode controller is done
and by verifying the results it is found that placing a Sliding
Mode Controller will be more adequate in bringing the beam
back to null position in desired time. From the results it is
clear that the proposed system can be applicable to
micro/nano level applications such as sensing and eliminating
the deformations of cantilever beams to adjust the focal
length of cameras which are being used in remote sensing
satellites.
Fig 6 Closed Loop Response of the Beam with Sliding Mode
Controller
REFERENCES
[1]. T. C. Manjunath and B. Bandyopadhyay, ”Smart
Control of cantilever structures,” International
Journal of simulations, Vol. 7, No.4, 2004.
[2]. Umapathy M., and Bandyopadhyay B, “Vibration
control of flexible beam through smart structure
concept using periodic output feedback,” System
Science Journal, Volume 26 Issue 1, Pages 23-46,
2000
[3]. Ulrich Gabbertl,Tamara Nestorovic Trajkovl and
Heinz Koppel ”Modeling , control, simulation of
piezoelectric smart structures using FEM and optimal
LQ control ,” Facta Universitatis Series: Mechanics,
Auto. Control and Robotics, Volume 3 Issue 12, Pages
417-430, 2002
IJISRT23NOV2023 www.ijisrt.com 1608
You might also like
- Internship Project Report: Nikhil DattaDocument19 pagesInternship Project Report: Nikhil DattaNikhil DattaNo ratings yet
- Design of Piezoresistive Microcantilever For Mass Sensing: V. Jyothi, B. Rajesh Kumar, V. Suresh, Ch. IndraniDocument7 pagesDesign of Piezoresistive Microcantilever For Mass Sensing: V. Jyothi, B. Rajesh Kumar, V. Suresh, Ch. Indraniijieee ijieeeNo ratings yet
- ch3 PDFDocument67 pagesch3 PDFSwing music academyNo ratings yet
- 2022.10 - ISAP - Low Profile Cylindrical Lens Antenna With Matching Layers For 2-Dimensional Beam-ScanningDocument2 pages2022.10 - ISAP - Low Profile Cylindrical Lens Antenna With Matching Layers For 2-Dimensional Beam-ScanningPhan HưngNo ratings yet
- Experiment No 2Document5 pagesExperiment No 2saish sakharkarNo ratings yet
- An Inductive Angular Displacement Sensor Based On Planar Coil and Contrate RotorDocument8 pagesAn Inductive Angular Displacement Sensor Based On Planar Coil and Contrate RotorakruNo ratings yet
- BTECH JournalDocument4 pagesBTECH Journalashith kodavanjiNo ratings yet
- belli2004Document6 pagesbelli2004rosarioiovino23No ratings yet
- A Novel Multi-Axis Force Sensor For Microrobotics ApplicationsDocument7 pagesA Novel Multi-Axis Force Sensor For Microrobotics ApplicationsAsnide ArmadaNo ratings yet
- Active Vibration Control of A Cantilever Beam Using PZT PATCH (SP-5H)Document3 pagesActive Vibration Control of A Cantilever Beam Using PZT PATCH (SP-5H)erpublicationNo ratings yet
- Using COMSOL-Multiphysics in An Eddy CurrentDocument5 pagesUsing COMSOL-Multiphysics in An Eddy CurrentANo ratings yet
- Dynamic Preisach Hysteresis ModelDocument5 pagesDynamic Preisach Hysteresis ModelairkadNo ratings yet
- Measure vibrations of cantilever beam and mass-spring systemDocument10 pagesMeasure vibrations of cantilever beam and mass-spring systemArun KumarNo ratings yet
- AC Loss Analysis of Striated HTS Compact Cables For Low Loss Cable DesignDocument4 pagesAC Loss Analysis of Striated HTS Compact Cables For Low Loss Cable DesignCristian Daniel Antilao PizarroNo ratings yet
- Seismic Response of Multi-Storey Building With Buckling Restrained Brace SystemDocument14 pagesSeismic Response of Multi-Storey Building With Buckling Restrained Brace Systemandrew cebanNo ratings yet
- KIEE 2010 Magnetic Sensor Design For Linear MachineDocument2 pagesKIEE 2010 Magnetic Sensor Design For Linear MachineKi ChunNo ratings yet
- Two Way Slab Direct Design Method (DDM) : Eng - Loai TarabulsiDocument45 pagesTwo Way Slab Direct Design Method (DDM) : Eng - Loai Tarabulsiمحمد الحمايدةNo ratings yet
- Conformal Wearable Monopole Antenna Backed by A Compact EBG Structure For Body Area NetworksDocument3 pagesConformal Wearable Monopole Antenna Backed by A Compact EBG Structure For Body Area NetworksnikitaNo ratings yet
- Micro - and Nano Systems Based On Vibrating StructuresDocument8 pagesMicro - and Nano Systems Based On Vibrating StructuresjovinjoNo ratings yet
- Analysis and Design of Suspension Cable BridgeDocument6 pagesAnalysis and Design of Suspension Cable BridgeIJRASETPublicationsNo ratings yet
- Spring Core Electrical OutputDocument6 pagesSpring Core Electrical Outputm_adnane_dz3184No ratings yet
- Experimental modal analysis of cantilever beam using wireless sensor nodeDocument4 pagesExperimental modal analysis of cantilever beam using wireless sensor noderanjithkrajNo ratings yet
- Applications of Piezo-Actuated Micro-Robots in Micro-Biology and Material ScienceDocument8 pagesApplications of Piezo-Actuated Micro-Robots in Micro-Biology and Material ScienceHassan allaNo ratings yet
- Calculation of Fluxgate Sensor ParametersDocument4 pagesCalculation of Fluxgate Sensor ParametersilkNo ratings yet
- Parallel P-PD Controller To Achieve Vibration and Position Control of A Flexible BeamDocument12 pagesParallel P-PD Controller To Achieve Vibration and Position Control of A Flexible BeamIAES International Journal of Robotics and AutomationNo ratings yet
- A Novel Miniaturized Polarization Independent Artificial Magnetic Conductor Using Patch Array LoadingDocument6 pagesA Novel Miniaturized Polarization Independent Artificial Magnetic Conductor Using Patch Array LoadinglibiriyazNo ratings yet
- Analytical Calculation of Proximity-Effect Resistance For Planar Coil With Litz Wire and Ferrite Plate in Inductive Power TransferDocument8 pagesAnalytical Calculation of Proximity-Effect Resistance For Planar Coil With Litz Wire and Ferrite Plate in Inductive Power TransfershuangwenNo ratings yet
- Paper Circular Revisi - English-PerbaikanDocument6 pagesPaper Circular Revisi - English-PerbaikanfahmiNo ratings yet
- Modeling and Simulation of The Orthogonal Cut by Using The Law of DamageDocument4 pagesModeling and Simulation of The Orthogonal Cut by Using The Law of DamageHayderyNo ratings yet
- Simulation of Bimorph Piezoelectric MicroactuatorsDocument6 pagesSimulation of Bimorph Piezoelectric MicroactuatorspvegaNo ratings yet
- Hermann Santha 17 PDFDocument15 pagesHermann Santha 17 PDFpradeep324No ratings yet
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- SAW& ComsolDocument5 pagesSAW& Comsollabirint10No ratings yet
- A Versatile Window Function Fro Linear Ion Drift Model-A New ApproachDocument10 pagesA Versatile Window Function Fro Linear Ion Drift Model-A New ApproachAmmuNo ratings yet
- Sciencedirect: An Ideal Mems Parametric Resonator Using A Tapered Comb-DriveDocument4 pagesSciencedirect: An Ideal Mems Parametric Resonator Using A Tapered Comb-DriveAgusAprilyansahNo ratings yet
- FEM Acoustic Analysis - NDT Angle Beam ExampleDocument28 pagesFEM Acoustic Analysis - NDT Angle Beam ExampleN DNo ratings yet
- IMI Sensors ShearvsCompressionDocument5 pagesIMI Sensors ShearvsCompressionTim StubbsNo ratings yet
- Fibre Beam ElementDocument55 pagesFibre Beam Elementmakkusa100% (1)
- CMOS-MEMS Scanner Design OptimizationDocument4 pagesCMOS-MEMS Scanner Design Optimizationwenhao chenNo ratings yet
- MEMS Comb Drive Actuator Spring Design OptimizationDocument6 pagesMEMS Comb Drive Actuator Spring Design OptimizationRnSi 0506No ratings yet
- Analytical Scalable PDFDocument9 pagesAnalytical Scalable PDFsourabhbasuNo ratings yet
- Analytical Scalable PDFDocument9 pagesAnalytical Scalable PDFsourabhbasuNo ratings yet
- Limitations of CLT Material Parameters for Vibration ModellingDocument6 pagesLimitations of CLT Material Parameters for Vibration ModellingANSLEM ALBERTNo ratings yet
- Historical Review of Microbend Fiber-Optic SensorsDocument7 pagesHistorical Review of Microbend Fiber-Optic SensorsNadia F Mohammad Al-RoshdeeNo ratings yet
- Eddycurrentsensor PCB SENSOR 2010Document8 pagesEddycurrentsensor PCB SENSOR 2010Siphesihle NkosiNo ratings yet
- Experiment No. 2Document7 pagesExperiment No. 2shivansh4shekharNo ratings yet
- Optik: Venkateswara Rao Kolli, Tupakula Srinivasulu, Gopalkrishna Hegde, T Badrinarayana, Srinivas TalabattulaDocument8 pagesOptik: Venkateswara Rao Kolli, Tupakula Srinivasulu, Gopalkrishna Hegde, T Badrinarayana, Srinivas TalabattulaSeenu IIscNo ratings yet
- Lab Manuel Michelson InterformerDocument9 pagesLab Manuel Michelson InterformerAryan VaidNo ratings yet
- Dual-Band Metamaterial Perfect Absorber With Nearly Polarization-IndependentDocument7 pagesDual-Band Metamaterial Perfect Absorber With Nearly Polarization-IndependentSergio GualduiNo ratings yet
- Waveguide Beam Splitter based on Optical TunnelingDocument2 pagesWaveguide Beam Splitter based on Optical TunnelingAdriel Mamani QuispeNo ratings yet
- Surface Micro Machined AccelerometersDocument10 pagesSurface Micro Machined AccelerometersjamsNo ratings yet
- Smart Structures Monitoring TechnologiesDocument30 pagesSmart Structures Monitoring TechnologiesRichardNo ratings yet
- Small Microstrip Patch AntennaDocument2 pagesSmall Microstrip Patch Antenna正气歌No ratings yet
- Properties of MicrostriplineDocument3 pagesProperties of MicrostriplinePrabhat Man SainjuNo ratings yet
- Kelemen 2008Document3 pagesKelemen 2008jona12345No ratings yet
- Advanced Layout Techniques For High-Speed Analogue Circuits in A 28nm HKMG CMOS ProcessDocument2 pagesAdvanced Layout Techniques For High-Speed Analogue Circuits in A 28nm HKMG CMOS ProcessМариета ЛюбеноваNo ratings yet
- An Engineering Approach in Modeling Overvoltage Effects On Wind Parks Caused by Travelling WavesDocument5 pagesAn Engineering Approach in Modeling Overvoltage Effects On Wind Parks Caused by Travelling WavesLuis José RodríguezNo ratings yet
- Nonlinear Analysis, Instability and Routes To Chaos of A Cracked Rotating ShaftDocument24 pagesNonlinear Analysis, Instability and Routes To Chaos of A Cracked Rotating ShaftSaberElAremNo ratings yet
- Comparison of Three L-Shaped Bent Photonic CrystalDocument4 pagesComparison of Three L-Shaped Bent Photonic CrystalCaptainLinNo ratings yet
- An Analysis on Mental Health Issues among IndividualsDocument6 pagesAn Analysis on Mental Health Issues among IndividualsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Harnessing Open Innovation for Translating Global Languages into Indian LanuagesDocument7 pagesHarnessing Open Innovation for Translating Global Languages into Indian LanuagesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Diabetic Retinopathy Stage Detection Using CNN and Inception V3Document9 pagesDiabetic Retinopathy Stage Detection Using CNN and Inception V3International Journal of Innovative Science and Research TechnologyNo ratings yet
- Investigating Factors Influencing Employee Absenteeism: A Case Study of Secondary Schools in MuscatDocument16 pagesInvestigating Factors Influencing Employee Absenteeism: A Case Study of Secondary Schools in MuscatInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Exploring the Molecular Docking Interactions between the Polyherbal Formulation Ibadhychooranam and Human Aldose Reductase Enzyme as a Novel Approach for Investigating its Potential Efficacy in Management of CataractDocument7 pagesExploring the Molecular Docking Interactions between the Polyherbal Formulation Ibadhychooranam and Human Aldose Reductase Enzyme as a Novel Approach for Investigating its Potential Efficacy in Management of CataractInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Making of Object Recognition Eyeglasses for the Visually Impaired using Image AIDocument6 pagesThe Making of Object Recognition Eyeglasses for the Visually Impaired using Image AIInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Relationship between Teacher Reflective Practice and Students Engagement in the Public Elementary SchoolDocument31 pagesThe Relationship between Teacher Reflective Practice and Students Engagement in the Public Elementary SchoolInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Dense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)Document2 pagesDense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Comparatively Design and Analyze Elevated Rectangular Water Reservoir with and without Bracing for Different Stagging HeightDocument4 pagesComparatively Design and Analyze Elevated Rectangular Water Reservoir with and without Bracing for Different Stagging HeightInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of Digital Marketing Dimensions on Customer SatisfactionDocument6 pagesThe Impact of Digital Marketing Dimensions on Customer SatisfactionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Electro-Optics Properties of Intact Cocoa Beans based on Near Infrared TechnologyDocument7 pagesElectro-Optics Properties of Intact Cocoa Beans based on Near Infrared TechnologyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Formulation and Evaluation of Poly Herbal Body ScrubDocument6 pagesFormulation and Evaluation of Poly Herbal Body ScrubInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Advancing Healthcare Predictions: Harnessing Machine Learning for Accurate Health Index PrognosisDocument8 pagesAdvancing Healthcare Predictions: Harnessing Machine Learning for Accurate Health Index PrognosisInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Utilization of Date Palm (Phoenix dactylifera) Leaf Fiber as a Main Component in Making an Improvised Water FilterDocument11 pagesThe Utilization of Date Palm (Phoenix dactylifera) Leaf Fiber as a Main Component in Making an Improvised Water FilterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Cyberbullying: Legal and Ethical Implications, Challenges and Opportunities for Policy DevelopmentDocument7 pagesCyberbullying: Legal and Ethical Implications, Challenges and Opportunities for Policy DevelopmentInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Auto Encoder Driven Hybrid Pipelines for Image Deblurring using NAFNETDocument6 pagesAuto Encoder Driven Hybrid Pipelines for Image Deblurring using NAFNETInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Terracing as an Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains- CameroonDocument14 pagesTerracing as an Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains- CameroonInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Survey of the Plastic Waste used in Paving BlocksDocument4 pagesA Survey of the Plastic Waste used in Paving BlocksInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Hepatic Portovenous Gas in a Young MaleDocument2 pagesHepatic Portovenous Gas in a Young MaleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design, Development and Evaluation of Methi-Shikakai Herbal ShampooDocument8 pagesDesign, Development and Evaluation of Methi-Shikakai Herbal ShampooInternational Journal of Innovative Science and Research Technology100% (3)
- Explorning the Role of Machine Learning in Enhancing Cloud SecurityDocument5 pagesExplorning the Role of Machine Learning in Enhancing Cloud SecurityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Review: Pink Eye Outbreak in IndiaDocument3 pagesA Review: Pink Eye Outbreak in IndiaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Automatic Power Factor ControllerDocument4 pagesAutomatic Power Factor ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Review of Biomechanics in Footwear Design and Development: An Exploration of Key Concepts and InnovationsDocument5 pagesReview of Biomechanics in Footwear Design and Development: An Exploration of Key Concepts and InnovationsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Mobile Distractions among Adolescents: Impact on Learning in the Aftermath of COVID-19 in IndiaDocument2 pagesMobile Distractions among Adolescents: Impact on Learning in the Aftermath of COVID-19 in IndiaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Studying the Situation and Proposing Some Basic Solutions to Improve Psychological Harmony Between Managerial Staff and Students of Medical Universities in Hanoi AreaDocument5 pagesStudying the Situation and Proposing Some Basic Solutions to Improve Psychological Harmony Between Managerial Staff and Students of Medical Universities in Hanoi AreaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Navigating Digitalization: AHP Insights for SMEs' Strategic TransformationDocument11 pagesNavigating Digitalization: AHP Insights for SMEs' Strategic TransformationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Drug Dosage Control System Using Reinforcement LearningDocument8 pagesDrug Dosage Control System Using Reinforcement LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Effect of Time Variables as Predictors of Senior Secondary School Students' Mathematical Performance Department of Mathematics Education Freetown PolytechnicDocument7 pagesThe Effect of Time Variables as Predictors of Senior Secondary School Students' Mathematical Performance Department of Mathematics Education Freetown PolytechnicInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Formation of New Technology in Automated Highway System in Peripheral HighwayDocument6 pagesFormation of New Technology in Automated Highway System in Peripheral HighwayInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- TN Govt RecruitmentDocument12 pagesTN Govt RecruitmentPriyanka ShankarNo ratings yet
- Science, Technology, Engineering and Mathematics (Stem) Grade 11 Grade 12 First Semester Second Semester First Semester Second SemesterDocument1 pageScience, Technology, Engineering and Mathematics (Stem) Grade 11 Grade 12 First Semester Second Semester First Semester Second SemesterJhondriel Lim71% (7)
- Cse 3003: Computer Networks: Dr. Sanket Mishra ScopeDocument56 pagesCse 3003: Computer Networks: Dr. Sanket Mishra ScopePOTNURU RAM SAINo ratings yet
- FLANSI CAP SONDA CatalogsDocument30 pagesFLANSI CAP SONDA CatalogsTeodor Ioan Ghinet Ghinet DorinaNo ratings yet
- SAP MM ReportsDocument59 pagesSAP MM Reportssaprajpal95% (21)
- Examen TSMDocument4 pagesExamen TSMKaryna VeraNo ratings yet
- D-2 UTEP Currey Final ReportDocument23 pagesD-2 UTEP Currey Final ReporthmcNo ratings yet
- Active and Passive Voice Chart PDFDocument1 pageActive and Passive Voice Chart PDFcastillo ceciliaNo ratings yet
- Trailers Parts - Rocket Trailers - Suspension & FastenersDocument24 pagesTrailers Parts - Rocket Trailers - Suspension & FastenersRocket TrailersNo ratings yet
- (Drago) That Time I Got Reincarnated As A Slime Vol 06 (Sub Indo)Document408 pages(Drago) That Time I Got Reincarnated As A Slime Vol 06 (Sub Indo)PeppermintNo ratings yet
- To Quantitative Analysis: To Accompany by Render, Stair, Hanna and Hale Power Point Slides Created by Jeff HeylDocument94 pagesTo Quantitative Analysis: To Accompany by Render, Stair, Hanna and Hale Power Point Slides Created by Jeff HeylNino NatradzeNo ratings yet
- Black Veil BridesDocument2 pagesBlack Veil BridesElyza MiradonaNo ratings yet
- Topic 4a Presentation: Types of PatrolDocument4 pagesTopic 4a Presentation: Types of PatrolGesler Pilvan SainNo ratings yet
- DriveDebug User ManualDocument80 pagesDriveDebug User ManualFan CharlesNo ratings yet
- Nad C541iDocument37 pagesNad C541iapi-3837207No ratings yet
- Ebola Research ProposalDocument10 pagesEbola Research ProposalChege AmbroseNo ratings yet
- Telegram Log File Details Launch Settings Fonts OpenGLDocument5 pagesTelegram Log File Details Launch Settings Fonts OpenGLThe nofrizalNo ratings yet
- Dimension ReductionDocument15 pagesDimension ReductionShreyas VaradkarNo ratings yet
- DOCS-#165539-v8-Technical Manual FOB4 TS Section 5 - MaintenanceDocument108 pagesDOCS-#165539-v8-Technical Manual FOB4 TS Section 5 - MaintenanceBME AOHNo ratings yet
- Bahasa Inggris RanggaDocument3 pagesBahasa Inggris RanggaArdiyantoNo ratings yet
- 4 Types and Methods of Speech DeliveryDocument2 pages4 Types and Methods of Speech DeliveryKylie EralinoNo ratings yet
- Yatendra Kumar Sharma ResumeDocument3 pagesYatendra Kumar Sharma ResumeDheeraj SharmaNo ratings yet
- 2746 PakMaster 75XL Plus (O)Document48 pages2746 PakMaster 75XL Plus (O)Samuel ManducaNo ratings yet
- Course 4Document3 pagesCourse 4Ibrahim SalahudinNo ratings yet
- Ndeb Bned Reference Texts 2019 PDFDocument11 pagesNdeb Bned Reference Texts 2019 PDFnavroop bajwaNo ratings yet
- Alicrite StringDocument4 pagesAlicrite Stringtias_marcoNo ratings yet
- Basic Computer Quiz - MCQ on Components, Generations & HistoryDocument7 pagesBasic Computer Quiz - MCQ on Components, Generations & Historyprem sagar100% (2)
- JSMSC - TDv3 6 20Document251 pagesJSMSC - TDv3 6 20Jason20170% (1)
- Vertical Transportation SystemDocument15 pagesVertical Transportation SystemAnupama MorankarNo ratings yet
- RCD-GillesaniaDocument468 pagesRCD-GillesaniaJomarie Alcano100% (2)