You might also like
- 20PWMCT0732 Lab#2Document8 pages20PWMCT0732 Lab#2Imad AhmadNo ratings yet
- 20PWMCT0732 Lab#4Document7 pages20PWMCT0732 Lab#4Imad AhmadNo ratings yet
- 20PWMCT0732 Lab#1Document9 pages20PWMCT0732 Lab#1Imad AhmadNo ratings yet
- 20PWMCT0732 Lab#3Document7 pages20PWMCT0732 Lab#3Imad AhmadNo ratings yet
- 20PWMCT0732 Lab#6Document4 pages20PWMCT0732 Lab#6Imad AhmadNo ratings yet
- MV Lab#1Document12 pagesMV Lab#1Muhammad ShaheerNo ratings yet
- 20PWMCT0732 Ass#3Document8 pages20PWMCT0732 Ass#3Imad AhmadNo ratings yet
- Theory of Machines Lab#1Document6 pagesTheory of Machines Lab#1Muhammad ShaheerNo ratings yet
- Lab 4Document4 pagesLab 4Faraz Ali ShahNo ratings yet
- Lab 6 LU DecompositionDocument6 pagesLab 6 LU DecompositionFaraz Ali ShahNo ratings yet
- Lab Report 01Document11 pagesLab Report 01M Mubashir AlamNo ratings yet
- Theory of Machines Lab#2Document7 pagesTheory of Machines Lab#2Muhammad ShaheerNo ratings yet
- Department of Mechatronics Engineering University of Engineering & Technology, PeshawarDocument5 pagesDepartment of Mechatronics Engineering University of Engineering & Technology, PeshawarFaraz Ali ShahNo ratings yet
- MV LAb#3Document8 pagesMV LAb#3Muhammad ShaheerNo ratings yet
- Lab 4 HandoutsDocument5 pagesLab 4 HandoutsLoveloveNo ratings yet
- MV Lab#4Document4 pagesMV Lab#4Muhammad ShaheerNo ratings yet
- MV Lab#2Document7 pagesMV Lab#2Muhammad ShaheerNo ratings yet
- DLD Lab#8Document10 pagesDLD Lab#8Zain Ullah Inayat UllahNo ratings yet
- Lab 5 Gauss EliminationDocument5 pagesLab 5 Gauss EliminationFaraz Ali ShahNo ratings yet
- Euler Method in MATLABDocument4 pagesEuler Method in MATLABFaraz Ali ShahNo ratings yet
- Lab Report 4 (19PWMCT0718)Document15 pagesLab Report 4 (19PWMCT0718)wahad ur rahmanNo ratings yet
- Lab NoDocument13 pagesLab NoSyed TaimurNo ratings yet
- Balancing of Disk On Motor Spring ApparatusDocument8 pagesBalancing of Disk On Motor Spring ApparatusHasnat SaleemNo ratings yet
- Theory of Machines Lab#3Document14 pagesTheory of Machines Lab#3Muhammad ShaheerNo ratings yet
- Lab Report FormatDocument9 pagesLab Report Formatwahad ur rahmanNo ratings yet
- Lab Report 6 (19PWMCT0718)Document24 pagesLab Report 6 (19PWMCT0718)wahad ur rahmanNo ratings yet
- Lab 6 Two Stroke EngineDocument5 pagesLab 6 Two Stroke EngineWaqas KhattakNo ratings yet
- To Observe The Whirling in The Long Shaft Using Whirling of Shaft ApparatusDocument9 pagesTo Observe The Whirling in The Long Shaft Using Whirling of Shaft ApparatusHasnat SaleemNo ratings yet
- MOM Lab Report 01Document14 pagesMOM Lab Report 01Zain Ullah Inayat UllahNo ratings yet
- MOM Lab Report 03Document11 pagesMOM Lab Report 03Zain Ullah Inayat UllahNo ratings yet
- MOM Lab Report 08 - For MergeDocument28 pagesMOM Lab Report 08 - For MergeZain Ullah Inayat UllahNo ratings yet
- Lab 08Document25 pagesLab 08wahad ur rahmanNo ratings yet
- MOM Lab No3Document4 pagesMOM Lab No3raptordon72No ratings yet
- Department of Mechatronics Engineering: TitleDocument16 pagesDepartment of Mechatronics Engineering: TitleHasnat SaleemNo ratings yet
- MOM Lab Report 04Document14 pagesMOM Lab Report 04Zain Ullah Inayat UllahNo ratings yet
- Lab Report 11 (19PWMCT0715) M Waleed TahirDocument17 pagesLab Report 11 (19PWMCT0715) M Waleed Tahirwahad ur rahmanNo ratings yet
- DLD Lab#6Document7 pagesDLD Lab#6Zain Ullah Inayat UllahNo ratings yet
- DLD Lab Report 03Document7 pagesDLD Lab Report 03Zain Ullah Inayat UllahNo ratings yet
- DLD Lab#07Document8 pagesDLD Lab#07Zain Ullah Inayat UllahNo ratings yet
- MOM Lab Report 02Document10 pagesMOM Lab Report 02Zain Ullah Inayat UllahNo ratings yet
- To Find The Eigen Frequency of The Cantilever Beam & To Analyze The Factor Effecting The Eigan Frequency of Cantilever Beam Using COMSOL MultiphysicsDocument9 pagesTo Find The Eigen Frequency of The Cantilever Beam & To Analyze The Factor Effecting The Eigan Frequency of Cantilever Beam Using COMSOL MultiphysicsHasnat SaleemNo ratings yet
- To Find The Eigen Frequency of The Circular Bimorph Piezo Plate Using COMSOL MultiphysicsDocument12 pagesTo Find The Eigen Frequency of The Circular Bimorph Piezo Plate Using COMSOL MultiphysicsHasnat SaleemNo ratings yet
- DLD Lab Report 4Document11 pagesDLD Lab Report 4Zain Ullah Inayat UllahNo ratings yet
- MOM Lab No 1Document5 pagesMOM Lab No 1raptordon72No ratings yet
- DLD Lab Report 01Document11 pagesDLD Lab Report 01Zain Ullah Inayat UllahNo ratings yet
- MOM Lab Report 07 - For MergeDocument28 pagesMOM Lab Report 07 - For MergeZain Ullah Inayat UllahNo ratings yet
- DLD Lab Report 2Document6 pagesDLD Lab Report 2Zain Ullah Inayat UllahNo ratings yet
- MOM Lab No2Document4 pagesMOM Lab No2raptordon72No ratings yet
- EPHYS 12 Lab 3 ProcedureDocument7 pagesEPHYS 12 Lab 3 ProcedureMERRY CHERRY HYNS BEDURIANo ratings yet
- Department of Mechatronics Engineering University of Engineering & Technology, PeshawarDocument10 pagesDepartment of Mechatronics Engineering University of Engineering & Technology, Peshawarihtishamul HaqNo ratings yet
- PhysE1 Lab Cover-PageDocument2 pagesPhysE1 Lab Cover-Pagejason mr.perfect11No ratings yet
- DLD - Lab# 05Document6 pagesDLD - Lab# 05Zain Ullah Inayat UllahNo ratings yet
- PO2-An Ability To Design and Conduct Experiments, As Well As To Analyze and Interpret DataDocument2 pagesPO2-An Ability To Design and Conduct Experiments, As Well As To Analyze and Interpret DatakesavantNo ratings yet
- Mechanics LAB REPORTDocument6 pagesMechanics LAB REPORTMohd Saiful Aiman Aminuddin100% (1)
- Lab 3Document4 pagesLab 3Abdul Moiz QarniNo ratings yet
- Fieldwork No. 2 (Differential Leveling)Document7 pagesFieldwork No. 2 (Differential Leveling)20101789No ratings yet
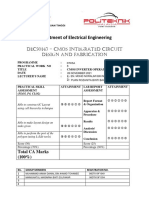
- Department of Electrical Engineering: dEC50143 - CMOS Integrated Circuit Design and FabricationDocument2 pagesDepartment of Electrical Engineering: dEC50143 - CMOS Integrated Circuit Design and FabricationMANNo ratings yet
- Mechanics of Material Lab 03Document20 pagesMechanics of Material Lab 03Syed Suleman Ayub - Section-BNo ratings yet
- Electrical Machines-Open Ended LabDocument3 pagesElectrical Machines-Open Ended LabALISHBA AZAMNo ratings yet
- Assignment DIPDocument17 pagesAssignment DIPImad AhmadNo ratings yet
- Assignment DIPDocument17 pagesAssignment DIPImad AhmadNo ratings yet
- DIP3E Chapter03 ArtDocument63 pagesDIP3E Chapter03 ArtImad AhmadNo ratings yet
- DIP3E Chapter06 ArtDocument51 pagesDIP3E Chapter06 ArtImad AhmadNo ratings yet
- DIP3E Chapter07 ArtDocument43 pagesDIP3E Chapter07 ArtImad AhmadNo ratings yet
- DIP3E - Chapter05 - Art - Image SegmentationDocument34 pagesDIP3E - Chapter05 - Art - Image SegmentationImad AhmadNo ratings yet
- Marketing 5Document27 pagesMarketing 5AliNo ratings yet
- Introduction To Operations Research 11E Ise 11Th Ise Edition Frederick S Hillier Full ChapterDocument67 pagesIntroduction To Operations Research 11E Ise 11Th Ise Edition Frederick S Hillier Full Chapterrobin.mccomb793No ratings yet
- Table of Specs Mil 1st PTDocument2 pagesTable of Specs Mil 1st PTRowel Magsino GonzalesNo ratings yet
- Manufacturing Process AssignmentDocument5 pagesManufacturing Process AssignmentPalani SuntharajanNo ratings yet
- Urban Bias in Community Development: Student: Tiongson Yvonne P. Instructor: Ar. Irene G. FlorendoDocument9 pagesUrban Bias in Community Development: Student: Tiongson Yvonne P. Instructor: Ar. Irene G. FlorendoYvonne TiongsonNo ratings yet
- ISO 90012015checklist - tcm14 57745 PDFDocument25 pagesISO 90012015checklist - tcm14 57745 PDFDaniela Muñoz SaldiasNo ratings yet
- Java Io NotesDocument19 pagesJava Io Notesgupta_ssrkm2747No ratings yet
- Apex CheatsheetDocument4 pagesApex CheatsheetAmit GangwarNo ratings yet
- Sogc AssignmentDocument2 pagesSogc Assignmentapi-573219210No ratings yet
- Module 5 Utilitarianism Part IDocument30 pagesModule 5 Utilitarianism Part IDenver Acenas100% (1)
- AccountingDocument45 pagesAccountingAfia ZaheenNo ratings yet
- Micro SplatDocument17 pagesMicro SplatCarlosAndresGarnicaSalazarNo ratings yet
- Alfa Laval PHEDocument16 pagesAlfa Laval PHESergio SmithNo ratings yet
- Ok - Las-Q2 Oral - Com W1Document5 pagesOk - Las-Q2 Oral - Com W1Ruben Rosendal De AsisNo ratings yet
- Nursing ResumeDocument2 pagesNursing Resumeapi-655558844No ratings yet
- 7.0 Overview of Vibrational Structural Health Monitoring With Representative Case StudiesDocument9 pages7.0 Overview of Vibrational Structural Health Monitoring With Representative Case Studiesankurshah1986No ratings yet
- The Sixth Extinction An Unnatural HistoryDocument20 pagesThe Sixth Extinction An Unnatural HistoryEDISON ALARCON100% (1)
- Microsoft Excel - Class 1Document12 pagesMicrosoft Excel - Class 1Carllouie De LaraNo ratings yet
- Momentum Equation in Cylindrical Coordinate: Appendix BDocument8 pagesMomentum Equation in Cylindrical Coordinate: Appendix BAbdul Rauf AttariNo ratings yet
- Domain 2 Communication and Interpersonal SkillsDocument4 pagesDomain 2 Communication and Interpersonal SkillsLip StickNo ratings yet
- Jmu Honors Thesis ProposalDocument4 pagesJmu Honors Thesis Proposalwbrgaygld100% (2)
- Decimal To BinaryDocument3 pagesDecimal To BinaryAngel AntonioNo ratings yet
- Worksheet - Work and Power ProblemsDocument2 pagesWorksheet - Work and Power ProblemsDaisy Soriano PrestozaNo ratings yet
- Pallet Truck wp3000 Spec1 GBDocument6 pagesPallet Truck wp3000 Spec1 GBEjaz EjazNo ratings yet
- Industrial Mechanical Vapour Recompression 1Document2 pagesIndustrial Mechanical Vapour Recompression 1Gaurav UpaNo ratings yet
- Standard Operating Procedure For Clinical Biochemistry: R. K. Life Services Private LimitedDocument7 pagesStandard Operating Procedure For Clinical Biochemistry: R. K. Life Services Private LimitedAniruddha ChatterjeeNo ratings yet
- CCINFMJ Passlist - 05082022Document2 pagesCCINFMJ Passlist - 05082022Kamlakar SadavarteNo ratings yet
- BEE MCQ Unit IVDocument16 pagesBEE MCQ Unit IVUmesh PatilNo ratings yet
- F639 1479757-1Document3 pagesF639 1479757-1Thaweekarn ChangthongNo ratings yet
- Sport Obermeyer PaperDocument10 pagesSport Obermeyer PaperagarwalankurkNo ratings yet