You might also like
- Highly Integrated Gate Drivers for Si and GaN Power TransistorsFrom EverandHighly Integrated Gate Drivers for Si and GaN Power TransistorsNo ratings yet
- High Performance Differential Protection, Analog Versus NumericalDocument6 pagesHigh Performance Differential Protection, Analog Versus NumericalratheeshkumardNo ratings yet
- Bus Bar Differential ProtrectionDocument16 pagesBus Bar Differential ProtrectionStalin Armijos ZambranoNo ratings yet
- Digital Busbar Protection - RahafDocument8 pagesDigital Busbar Protection - RahafRahaf WaheepNo ratings yet
- Algorithm For Digital Low ImpedanceDocument8 pagesAlgorithm For Digital Low ImpedanceJanen AhujaNo ratings yet
- Rahaf Busbar-ModificationDocument9 pagesRahaf Busbar-ModificationRahaf WaheepNo ratings yet
- Comparison Between High Impedance and Low Impedance Bus Differential ProtectionDocument15 pagesComparison Between High Impedance and Low Impedance Bus Differential Protectionpop papNo ratings yet
- 2006paper19 SegregatedbusDocument32 pages2006paper19 SegregatedbusRahaf WaheepNo ratings yet
- Proteksi BusbarDocument30 pagesProteksi BusbarAdhyartha KerafNo ratings yet
- An Overview of High Impedance Differential Scheme, Design, Protection and Simulation For A 132 KV Double Bus Bar Single Breaker SystemDocument7 pagesAn Overview of High Impedance Differential Scheme, Design, Protection and Simulation For A 132 KV Double Bus Bar Single Breaker SystemparadiseparasNo ratings yet
- Busbar Protection - A ReviewDocument5 pagesBusbar Protection - A ReviewPrajiWazharyNo ratings yet
- Double Bus With Bus Tie ProtectionDocument4 pagesDouble Bus With Bus Tie ProtectionWoei Song OoiNo ratings yet
- 32 IJTPE Issue18 Vol6 No1 Mar2014 pp204 209Document6 pages32 IJTPE Issue18 Vol6 No1 Mar2014 pp204 209Salman ZafarNo ratings yet
- Multi-Terminal DC System Line Protection Requirement and High Speed Protection SolutionsDocument9 pagesMulti-Terminal DC System Line Protection Requirement and High Speed Protection SolutionsMuhammad AftabuzzamanNo ratings yet
- Circuit Breaker Ratings - A Primer For Protection EngineersDocument15 pagesCircuit Breaker Ratings - A Primer For Protection EngineersintrudentalertNo ratings yet
- Diff Protection PDFDocument14 pagesDiff Protection PDFarunNo ratings yet
- High Impedance Relay and Low Impedance RelayDocument1 pageHigh Impedance Relay and Low Impedance RelayIrfan UllahNo ratings yet
- Cpre 2017 8090038Document19 pagesCpre 2017 8090038Rahaf WaheepNo ratings yet
- Ijaerv12n2 02Document6 pagesIjaerv12n2 02Hardik MakwanaNo ratings yet
- Microelectronics Journal: Ali Nejati, Sara Radfar, Parviz Amiri, Mohammad Hossein MaghamiDocument12 pagesMicroelectronics Journal: Ali Nejati, Sara Radfar, Parviz Amiri, Mohammad Hossein MaghamiReza RezaNo ratings yet
- Designing For Circuit Breaker Instantaneous SelectivityDocument9 pagesDesigning For Circuit Breaker Instantaneous Selectivityparrilla506No ratings yet
- Crossley 2005BDocument9 pagesCrossley 2005BJames FitzGeraldNo ratings yet
- ZG Final PHD ThesisDocument228 pagesZG Final PHD ThesisRafael Coats RamirezNo ratings yet
- Phasor-Based Transient Earth-Fault Protection: October 2020Document27 pagesPhasor-Based Transient Earth-Fault Protection: October 2020FredrikNo ratings yet
- Open Core Power Voltage TransformerDocument17 pagesOpen Core Power Voltage TransformergebzoriNo ratings yet
- 6877 ApplicationConsiderations MT 20181207 WebDocument26 pages6877 ApplicationConsiderations MT 20181207 WebintrudentalertNo ratings yet
- The Design of A Modern Protection System For A Static Var CompensatorDocument7 pagesThe Design of A Modern Protection System For A Static Var CompensatorchetanNo ratings yet
- BD1Document11 pagesBD1NeelakantNo ratings yet
- A New Differential Protection Scheme For Busbar Considering CT Saturation EffectDocument4 pagesA New Differential Protection Scheme For Busbar Considering CT Saturation EffectMuruganNo ratings yet
- Bus ProtectionDocument21 pagesBus ProtectionSoumik DandapatNo ratings yet
- Protection of Distribution Grid Having DGDocument16 pagesProtection of Distribution Grid Having DGiftikhar395No ratings yet
- Bus Bar Seminer PresentationDocument28 pagesBus Bar Seminer PresentationEr Chandan Baishya100% (1)
- Busbar Protection: Dinesh Kumar Sarda A.Manager (MRSS)Document30 pagesBusbar Protection: Dinesh Kumar Sarda A.Manager (MRSS)karthikNo ratings yet
- Unit Iv - Apparatus Protection: December 2023Document71 pagesUnit Iv - Apparatus Protection: December 2023sapnarauthanNo ratings yet
- Commissioning Complex Busbar Prot SchemesDocument9 pagesCommissioning Complex Busbar Prot Schemesrasheed313No ratings yet
- Electrical Power and Energy Systems: Tomislav Rajic, Zoran StojanovicDocument11 pagesElectrical Power and Energy Systems: Tomislav Rajic, Zoran StojanovicZahaira OblitasNo ratings yet
- 2 Capacitor BanksDocument16 pages2 Capacitor Banksap_venezuelaNo ratings yet
- A New Filter Concept For High Pulse-Frequency 3-PhDocument23 pagesA New Filter Concept For High Pulse-Frequency 3-PhBinh NguyenNo ratings yet
- Differential Protection - Proven Technique For More Than 50 Years - EEPDocument6 pagesDifferential Protection - Proven Technique For More Than 50 Years - EEPAbdul Mohid SheikhNo ratings yet
- On The Insulation Co-Ordination Studies Using (Emtp)Document5 pagesOn The Insulation Co-Ordination Studies Using (Emtp)adauNo ratings yet
- BB ProtectionDocument38 pagesBB ProtectionMOHAMED KHAMIS0% (1)
- Transformador de Estado SolidoDocument48 pagesTransformador de Estado SolidoBalo GrisNo ratings yet
- Arduino Based Short Circuit Protection SDocument5 pagesArduino Based Short Circuit Protection SReena ExpNo ratings yet
- Design HDocument7 pagesDesign HJohn Mark DalidaNo ratings yet
- Survey On Power Optimization Techniques For Low Power Vlsi Circuit in Deep Submicron TechnologyDocument15 pagesSurvey On Power Optimization Techniques For Low Power Vlsi Circuit in Deep Submicron TechnologyAnonymous e4UpOQEPNo ratings yet
- Key Words: Shunt Capacitor Bank, Externally-Fused Capacitor Bank, Fuseless Capacitor Bank, ElementDocument15 pagesKey Words: Shunt Capacitor Bank, Externally-Fused Capacitor Bank, Fuseless Capacitor Bank, ElementMuhammad AliNo ratings yet
- En Product Guide REB670 1.2 Pre-ConfiguredDocument70 pagesEn Product Guide REB670 1.2 Pre-ConfiguredAnonymous JEA0HbNo ratings yet
- Universidad Tecnólogica de Panamá: 1. Commissioning Practical Aspects of Relays With IECDocument20 pagesUniversidad Tecnólogica de Panamá: 1. Commissioning Practical Aspects of Relays With IECIsaac JustinNo ratings yet
- Busbar Protection Systems: Busbars Are A Vital, Yet Often Overlooked, Part of The Power SystemDocument3 pagesBusbar Protection Systems: Busbars Are A Vital, Yet Often Overlooked, Part of The Power SystemKeval VelaniNo ratings yet
- Energies 14 02477 v2Document29 pagesEnergies 14 02477 v2Hasmat MalikNo ratings yet
- M C - E D B P S: Odern OST Fficient Igital Usbar Rotection OlutionsDocument26 pagesM C - E D B P S: Odern OST Fficient Igital Usbar Rotection OlutionsalimaghamiNo ratings yet
- Meyer Rufer 2006Document7 pagesMeyer Rufer 2006IanNo ratings yet
- Design Stratigies of Low Power Voltage Level Shifter Circuits For Multi Supply SystemsDocument6 pagesDesign Stratigies of Low Power Voltage Level Shifter Circuits For Multi Supply SystemsIRJMETS JOURNALNo ratings yet
- Low Power Techniques For VLSI DesignDocument6 pagesLow Power Techniques For VLSI DesignjainatinNo ratings yet
- I. Iger - Open-Core Power Voltage Transformer - Concept, Properties, ApplicationDocument8 pagesI. Iger - Open-Core Power Voltage Transformer - Concept, Properties, ApplicationDalibor MarkovicNo ratings yet
- Bus Bar Hand Book-2Document55 pagesBus Bar Hand Book-2Sakthi MuruganNo ratings yet
- Busbar ProtectionDocument4 pagesBusbar Protectiondundi_kumarNo ratings yet
- Coiled For ProtectionDocument6 pagesCoiled For ProtectionAbdelsalam ElhaffarNo ratings yet
- Proteccion Diferencial de BarrasDocument19 pagesProteccion Diferencial de BarrasSalvador Gutierrez CruzNo ratings yet
- BBP ZGDocument17 pagesBBP ZGRahaf WaheepNo ratings yet
- ReferenceDocument1 pageReferenceRahaf WaheepNo ratings yet
- Cpre 2017 8090038Document19 pagesCpre 2017 8090038Rahaf WaheepNo ratings yet
- 2006paper19 SegregatedbusDocument32 pages2006paper19 SegregatedbusRahaf WaheepNo ratings yet
- Transformer P1Document33 pagesTransformer P1ZelalemNo ratings yet
- Ag2021-29 20211210Document8 pagesAg2021-29 20211210Augusto César MarianoNo ratings yet
- 3RN10131BW10 Datasheet enDocument3 pages3RN10131BW10 Datasheet enXuân Kiên VũNo ratings yet
- Current Transformer Application GuideDocument54 pagesCurrent Transformer Application GuideucschewNo ratings yet
- Graphene Transistors by Frank SchwierzDocument10 pagesGraphene Transistors by Frank SchwierzshreypathakNo ratings yet
- 3AP-3FI - Mach Noi BoDocument168 pages3AP-3FI - Mach Noi BoBảo NguyễnNo ratings yet
- Power Sports: Spark Plugs / Resistor Caps Racing Cables / SplicerDocument8 pagesPower Sports: Spark Plugs / Resistor Caps Racing Cables / SplicerraheemNo ratings yet
- T12A P 10008883B S015 A - Main - Circuit - RevDocument2 pagesT12A P 10008883B S015 A - Main - Circuit - RevluchitoferNo ratings yet
- TM 9 4935 601 14 3&PDocument137 pagesTM 9 4935 601 14 3&Pkhaerul jannahNo ratings yet
- Honeywell Fg1625rfm Install GuideDocument2 pagesHoneywell Fg1625rfm Install GuideAlarm Grid Home Security and Alarm MonitoringNo ratings yet
- Manual and Remote Start Unit: Measurements DescriptionDocument2 pagesManual and Remote Start Unit: Measurements DescriptionmoaazabubakrNo ratings yet
- Junction Field Effect TransistorDocument27 pagesJunction Field Effect Transistorsanthosh100% (1)
- Course Outline - Electrical Machines - Feb 7Document5 pagesCourse Outline - Electrical Machines - Feb 7Ahad MunawarNo ratings yet
- Catalog Conectori WagoDocument252 pagesCatalog Conectori WagoCosmin RoboNo ratings yet
- Lect 3Document42 pagesLect 3Supriya Rakshit0% (1)
- Main Control Board User ManualDocument15 pagesMain Control Board User Manualmohammedalathwary100% (1)
- 3.3. Fault Codes: Error Code Origin State of The Centrifuge User's Action 01Document3 pages3.3. Fault Codes: Error Code Origin State of The Centrifuge User's Action 01Ruben DuranNo ratings yet
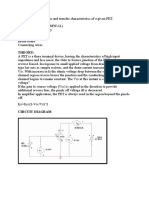
- Plot Characteristics of FETDocument4 pagesPlot Characteristics of FETTapobroto Chatterjee100% (2)
- 300kVA XFMR Installation Project DrawingsDocument5 pages300kVA XFMR Installation Project Drawingsnitroxx7No ratings yet
- Assignment3 - Gated Diode+MOSFETDocument20 pagesAssignment3 - Gated Diode+MOSFETIndranil ChakrabortyNo ratings yet
- Silicon N Channel MOS FET High Speed Power Switching: FeaturesDocument7 pagesSilicon N Channel MOS FET High Speed Power Switching: Featurestecnologo456No ratings yet
- Electrical SafetyDocument10 pagesElectrical SafetyUrsula JohnsonNo ratings yet
- Elastimold 156LRDocument2 pagesElastimold 156LRTamer AlahmedNo ratings yet
- Electrical System in AutomobileDocument13 pagesElectrical System in AutomobileRohit kendreNo ratings yet
- Conventional Fire Alarm AccessoriesDocument1 pageConventional Fire Alarm AccessoriessameeraNo ratings yet
- 12.testing of High Voltage Equipment and Insulation CoordinationDocument53 pages12.testing of High Voltage Equipment and Insulation CoordinationumeshNo ratings yet
- Lab Manual Workshop-Cse 2023-24 Odd SemDocument75 pagesLab Manual Workshop-Cse 2023-24 Odd SemAzad HussainNo ratings yet
- Transmission EHV Substation APL 20220127Document19 pagesTransmission EHV Substation APL 20220127Cristina SubirNo ratings yet
- 3540i ManualDocument10 pages3540i ManualWil WiltmarNo ratings yet
- National Electrical Code: Understanding TheDocument36 pagesNational Electrical Code: Understanding TheJuan Carlos Cabello Montiel50% (2)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)From EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Rating: 5 out of 5 stars5/5 (2)
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyFrom EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyRating: 1.5 out of 5 stars1.5/5 (2)
- Beginning AutoCAD® 2020 Exercise WorkbookFrom EverandBeginning AutoCAD® 2020 Exercise WorkbookRating: 2.5 out of 5 stars2.5/5 (3)
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersFrom EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersNo ratings yet
- Design Research Through Practice: From the Lab, Field, and ShowroomFrom EverandDesign Research Through Practice: From the Lab, Field, and ShowroomRating: 3 out of 5 stars3/5 (7)
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Contactless Vital Signs MonitoringFrom EverandContactless Vital Signs MonitoringWenjin WangNo ratings yet
- Autodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersFrom EverandAutodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersNo ratings yet