You might also like
- Guide for Planning, Construction and Maintenance of Forest RoadsFrom EverandGuide for Planning, Construction and Maintenance of Forest RoadsNo ratings yet
- Highway Geometric DesignDocument8 pagesHighway Geometric DesignBin IqbalNo ratings yet
- Sustainable Parking Management: Practices, Policies, and MetricsFrom EverandSustainable Parking Management: Practices, Policies, and MetricsNo ratings yet
- Highway Geometric DesignDocument50 pagesHighway Geometric DesignNITIN AHERNo ratings yet
- Highway Engineering: Planning, Design, and OperationsFrom EverandHighway Engineering: Planning, Design, and OperationsRating: 4.5 out of 5 stars4.5/5 (24)
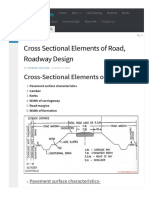
- Cross Sectional Elements of A RoadDocument4 pagesCross Sectional Elements of A RoadAbdur RahmanNo ratings yet
- TransportationDocument107 pagesTransportationHalf EngrNo ratings yet
- Module 2 1Document142 pagesModule 2 1Pankaj N ReddyNo ratings yet
- Cross SectionDocument47 pagesCross SectionDevi PrasadNo ratings yet
- CH-3 Geometric Design of HighwaysDocument146 pagesCH-3 Geometric Design of HighwaysRmesh jhaNo ratings yet
- Unit IvDocument38 pagesUnit IvAmith SharmaNo ratings yet
- STPDF1 - Highway Geometric DesignDocument31 pagesSTPDF1 - Highway Geometric DesignLuis FonbuenaNo ratings yet
- 3.1 - Cross Section Elements FDocument66 pages3.1 - Cross Section Elements FKirtiyadavNo ratings yet
- Transportation Engineering-part 2 (1)Document151 pagesTransportation Engineering-part 2 (1)Bayan AmmoriNo ratings yet
- Geometric Design 1Document59 pagesGeometric Design 1Maria Divina Romero TabuaNo ratings yet
- Transportation Slide PDFDocument147 pagesTransportation Slide PDFMd ZimNo ratings yet
- Highway Engineering BasicsDocument16 pagesHighway Engineering BasicsRupesh PokharelNo ratings yet
- Geometric Design of HighwaysDocument80 pagesGeometric Design of Highwaysc/qaadir100% (1)
- CH 3 Geometric DesignDocument79 pagesCH 3 Geometric DesignMadan SunarNo ratings yet
- HGT Characteristics of Highway PavementsDocument4 pagesHGT Characteristics of Highway PavementsVeeramuthu SundararajuNo ratings yet
- Highway: Geometric DesignDocument33 pagesHighway: Geometric DesignGabriel Abanto QueseaNo ratings yet
- Highway Geometric DesignDocument89 pagesHighway Geometric Designphani sankarNo ratings yet
- Highway Assignments AknDocument6 pagesHighway Assignments AknJOHN KENNETH JIMENONo ratings yet
- Group AssignmentDocument20 pagesGroup AssignmentJoshi ChumbaleNo ratings yet
- Highway Engineering Chapter TwoDocument17 pagesHighway Engineering Chapter TwoCHANDRAKANT BHUKTARENo ratings yet
- Geometric Design of HighwaysDocument41 pagesGeometric Design of HighwaysTafaraNo ratings yet
- Cross Sectional Elements of A RoadDocument16 pagesCross Sectional Elements of A RoadRamanarayanSankritiNo ratings yet
- G4 Written Report HREDocument6 pagesG4 Written Report HREJOLLY JARAMIELNo ratings yet
- Lecture 3 Cross Section ElementsDocument19 pagesLecture 3 Cross Section ElementsNdanu MercyNo ratings yet
- 2.2 Design Criteria of HighwaysDocument26 pages2.2 Design Criteria of HighwaysMikealla David100% (1)
- Geometric Design For Highways and Railways Including Cross Sections Horizontal and Vertical Alignments Super Elevation and EarthworksDocument21 pagesGeometric Design For Highways and Railways Including Cross Sections Horizontal and Vertical Alignments Super Elevation and EarthworksJannila PaulinoNo ratings yet
- Lecture 5 - Cross Section ElementsDocument41 pagesLecture 5 - Cross Section ElementsMalik UmarNo ratings yet
- Highway RevDocument11 pagesHighway RevChristine Joy ConsolacionNo ratings yet
- Elements of A Typical Cross-Section of Road: Transportation Engineering - IDocument40 pagesElements of A Typical Cross-Section of Road: Transportation Engineering - INasirNo ratings yet
- Geometric Design of Highways for Safe DrivingDocument72 pagesGeometric Design of Highways for Safe DrivingRajas AthalyeNo ratings yet
- Considerations For Highway Planning and Design Highway Geometric DesignDocument13 pagesConsiderations For Highway Planning and Design Highway Geometric DesignJosh TuraiNo ratings yet
- Geometric Design of HighwayDocument30 pagesGeometric Design of HighwayRiyad ArafatNo ratings yet
- Road 2Document8 pagesRoad 2thanshayarNo ratings yet
- Designing The Highway: Reporters: Tizon, Paul Vincent Mangaoil, Jelica Palermo, Rosa Mae Dollado, Ma. JessaDocument30 pagesDesigning The Highway: Reporters: Tizon, Paul Vincent Mangaoil, Jelica Palermo, Rosa Mae Dollado, Ma. JessaMariya MariyaNo ratings yet
- Essential Elements of a Highway Cross-SectionDocument22 pagesEssential Elements of a Highway Cross-SectionKathleen BuenavistaNo ratings yet
- Highway Geometric DesignDocument40 pagesHighway Geometric Designharikeerthan84% (19)
- Geometric Design For Highways and RailwaysDocument5 pagesGeometric Design For Highways and RailwaysBibat, Alexah Marie D.No ratings yet
- What Is Geometric Design of Highway?Document6 pagesWhat Is Geometric Design of Highway?JOHN KENNETH JIMENO100% (1)
- Cross Section Elements of Highways ExplainedDocument24 pagesCross Section Elements of Highways ExplainedChirag AhlawatNo ratings yet
- BTE Activity 3Document9 pagesBTE Activity 3batchitcandidNo ratings yet
- Transportation Lecture 3 To OnwardDocument157 pagesTransportation Lecture 3 To OnwardJr Rameez RajaNo ratings yet
- Road Alignment and Setting OutDocument32 pagesRoad Alignment and Setting OutJEAN DE DIEU MUVARA100% (1)
- CH 3 Geometric Design-TransportationDocument61 pagesCH 3 Geometric Design-TransportationMadan SunarNo ratings yet
- Geometric Design of Highways (2 Units)Document31 pagesGeometric Design of Highways (2 Units)Gerald MagingaNo ratings yet
- Introduction To Geometric DesignDocument12 pagesIntroduction To Geometric DesignDebojit NandiNo ratings yet
- Highway Route Surveys and LocationDocument12 pagesHighway Route Surveys and Locationaklilu teferaNo ratings yet
- Cross Sectional Elements PDFDocument23 pagesCross Sectional Elements PDFmuzamilNo ratings yet
- Report Highway EngineeringDocument33 pagesReport Highway EngineeringjianNo ratings yet
- Chapter 2 Highway EngineeringDocument75 pagesChapter 2 Highway EngineeringChristian Jude LegaspiNo ratings yet
- Chapter - 3-Geometric Design of Highways Cross Sectional ElementsDocument17 pagesChapter - 3-Geometric Design of Highways Cross Sectional ElementsTewodros Abate100% (1)
- CE103-1 - 3. Design Criteria For Highways (DPWH DGCS)Document47 pagesCE103-1 - 3. Design Criteria For Highways (DPWH DGCS)isidro ylananNo ratings yet
- Highway Cross Section ElementsDocument18 pagesHighway Cross Section ElementsPRITI DAS100% (2)
- Module in Highway & Transportation Engineering Topic 4 V 4Document35 pagesModule in Highway & Transportation Engineering Topic 4 V 4Radie ArnaldoNo ratings yet
- 7 - Gemoetric Design of Highway FacilitiesDocument35 pages7 - Gemoetric Design of Highway FacilitiesPenelope MalilweNo ratings yet
- Geometrical Design of HighwayDocument65 pagesGeometrical Design of Highwayjong LacNo ratings yet
- RA For Asphalt WorksDocument19 pagesRA For Asphalt WorksBleep News100% (6)
- CIVE 437 - Syllabus 2023 FallDocument2 pagesCIVE 437 - Syllabus 2023 FallAtifNo ratings yet
- Safety Root Causes AnalysisDocument1 pageSafety Root Causes AnalysisMiguel CasafrancaNo ratings yet
- Highway Engineering I Chapter Three Cross-Sectional Elements of RoadsDocument17 pagesHighway Engineering I Chapter Three Cross-Sectional Elements of RoadsAbush TigabuNo ratings yet
- Road SafetyDocument27 pagesRoad SafetySamson ShineNo ratings yet
- CDI 4N Traffic Incident Investigation With Driving NotesDocument30 pagesCDI 4N Traffic Incident Investigation With Driving NotesGerald B. DawaganNo ratings yet
- Traffic Management Investigation StudentDocument273 pagesTraffic Management Investigation StudentQueenie Mae LucasNo ratings yet
- Nepal 3Document9 pagesNepal 3Er Satya Raj SinghNo ratings yet
- Affidavit of Vehicular AccidentDocument1 pageAffidavit of Vehicular AccidentEric EchonNo ratings yet
- ISO 26262 Training: Module K3 - Concept PhaseDocument70 pagesISO 26262 Training: Module K3 - Concept PhasePradhan HNo ratings yet
- Transportation & Traffic Engineering (Rfa)Document3 pagesTransportation & Traffic Engineering (Rfa)REX AMPONGANNo ratings yet
- CW TS: Symposium On Safety Driving and Bikers AwarenessDocument7 pagesCW TS: Symposium On Safety Driving and Bikers AwarenessEric LucasNo ratings yet
- KS 12-19.11.2019 PDFDocument59 pagesKS 12-19.11.2019 PDFPrasann P'telNo ratings yet
- Parking Studies: DR RawidDocument7 pagesParking Studies: DR RawidaqeelshahNo ratings yet
- Generic Risk Assessment FormDocument6 pagesGeneric Risk Assessment FormarpondevNo ratings yet
- Man Made DisastersDocument5 pagesMan Made DisastersAbhishekNo ratings yet
- Course DiscriptionDocument1 pageCourse DiscriptionJeric CatalanNo ratings yet
- Pawar Et Al. - 2020 - Modelling Braking Behaviour and Accident Probability of Drivers Under Increasing Time Pressure ConditionsDocument17 pagesPawar Et Al. - 2020 - Modelling Braking Behaviour and Accident Probability of Drivers Under Increasing Time Pressure ConditionsDamon SNo ratings yet
- Multiple-choice traffic safety questionsDocument7 pagesMultiple-choice traffic safety questionsSufian AbusninaNo ratings yet
- Highway Rating CircularDocument18 pagesHighway Rating CircularSasanka SekharNo ratings yet
- Traffic Control DevicesDocument10 pagesTraffic Control DevicesYusril YudhaNo ratings yet
- FDOT Design StandardsDocument26 pagesFDOT Design StandardsAkshay PrabhakarNo ratings yet
- Traffic Changes in Granford IELTS Listening Answers With Audio, Transcript, and ExplanationDocument6 pagesTraffic Changes in Granford IELTS Listening Answers With Audio, Transcript, and ExplanationBánh Mặn0% (1)
- IRC Accredited New Materials October2020Document2 pagesIRC Accredited New Materials October2020Yudhir TandonNo ratings yet
- DRC Exam Reviewer 2023 PDF 1Document7 pagesDRC Exam Reviewer 2023 PDF 1kuroakashiteNo ratings yet
- Mste Exam 2Document16 pagesMste Exam 2Greg Rasco, REE, RMPNo ratings yet
- Check List For Audit of Existing RoadDocument7 pagesCheck List For Audit of Existing RoadThasneem K. SNo ratings yet
- TTT-Toyota Theoretical Training Version2019Document206 pagesTTT-Toyota Theoretical Training Version2019yuvi_cool7No ratings yet
- Nepal StatuspaperDocument12 pagesNepal StatuspaperNitish JhaNo ratings yet
- Qd0002 Adm Tem Hse 00018 Lessons Learned Rev 0aDocument2 pagesQd0002 Adm Tem Hse 00018 Lessons Learned Rev 0ashah fahadNo ratings yet