You might also like
- ASME Geometric Dimension Ing and Tolerance Professional CertificationDocument20 pagesASME Geometric Dimension Ing and Tolerance Professional CertificationPaul Anthony Red60% (5)
- ENSC3001 - Exam NotesDocument13 pagesENSC3001 - Exam NotesGeoffreyWanNo ratings yet
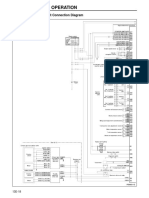
- Structure and Operation: 3. Electronic Control Unit Connection DiagramDocument16 pagesStructure and Operation: 3. Electronic Control Unit Connection DiagramAung Hlaing Min MyanmarNo ratings yet
- Samsung Galaxy Watch 5 Pro User ManualDocument131 pagesSamsung Galaxy Watch 5 Pro User Manualzyron100% (1)
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankFrom EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNo ratings yet
- Applied Mathematics For Business and EconomicsDocument87 pagesApplied Mathematics For Business and EconomicsVladim Romello Persaud100% (3)
- Beamforming For 4.9G/5G Networks: Exploiting Massive MIMO and Active Antenna TechnologiesDocument12 pagesBeamforming For 4.9G/5G Networks: Exploiting Massive MIMO and Active Antenna TechnologiesAymen Ben zinebNo ratings yet
- Analytical Chemistry (CHM111) Laboratory ManualDocument73 pagesAnalytical Chemistry (CHM111) Laboratory ManualKatrina BucudNo ratings yet
- Linear System and Random Process Final PhanLeNhatTan MEEIU23007Document11 pagesLinear System and Random Process Final PhanLeNhatTan MEEIU23007Sirus DanhNo ratings yet
- Robert Sang - QMDocument136 pagesRobert Sang - QMVbsa BsaNo ratings yet
- X n+1 Anxn + bnxn-1: The Numerov Algorithm For Satellite OrbitsDocument6 pagesX n+1 Anxn + bnxn-1: The Numerov Algorithm For Satellite OrbitsEpic WinNo ratings yet
- Maths ProjectDocument26 pagesMaths Projectchaudhary.vansh2307No ratings yet
- Mod - and - Cont - of LIP100Document36 pagesMod - and - Cont - of LIP100muhammad mamoonNo ratings yet
- Opt2017 Part1Document48 pagesOpt2017 Part1Co londota2No ratings yet
- Mal 641 - 19042019Document170 pagesMal 641 - 19042019kashif ali shahNo ratings yet
- Derivation of Orbits in Inverse Square Law Force Fields: Force Center (Also The Coordinate Center)Document6 pagesDerivation of Orbits in Inverse Square Law Force Fields: Force Center (Also The Coordinate Center)Epic WinNo ratings yet
- Calc3 3 Multiple IntegrationDocument24 pagesCalc3 3 Multiple IntegrationNicolas Reyes GomezNo ratings yet
- Empirical Analysis of Detection Cascades of Boosted Classifiers For Rapid Object DetectionDocument8 pagesEmpirical Analysis of Detection Cascades of Boosted Classifiers For Rapid Object DetectionMamik CiamikNo ratings yet
- Maths ProjectDocument18 pagesMaths ProjectSanjay JindalNo ratings yet
- R O M H A H A: Educed Rder Odeling Ybrid Pproach Ybrid PproachDocument30 pagesR O M H A H A: Educed Rder Odeling Ybrid Pproach Ybrid PproachLei TuNo ratings yet
- Functional Analysis. Jie XiaoDocument142 pagesFunctional Analysis. Jie XiaojfeliperqNo ratings yet
- MTHS111 Lesson2 2024Document23 pagesMTHS111 Lesson2 2024pearphelokazi45No ratings yet
- Introduction DFTDocument58 pagesIntroduction DFTdebmallyNo ratings yet
- Trigo Bridging 4Document9 pagesTrigo Bridging 4azziraem jaranillaNo ratings yet
- Linear Prediction: The Problem, Its Solution and Application To SpeechDocument22 pagesLinear Prediction: The Problem, Its Solution and Application To SpeechAlex Krockas Botamas ChonnaNo ratings yet
- Mechanical Engineering Ecet 2021Document10 pagesMechanical Engineering Ecet 2021Mohammed AffanNo ratings yet
- Electrical and Electronics EngineeringDocument10 pagesElectrical and Electronics EngineeringNaseer sNo ratings yet
- Mining EngineeringDocument14 pagesMining EngineeringKonam Varun prasadNo ratings yet
- On-Resolution of Transportation Issues in Fuzzy Environment Exploitation Ranking FunctionDocument6 pagesOn-Resolution of Transportation Issues in Fuzzy Environment Exploitation Ranking FunctionTJPRC PublicationsNo ratings yet
- 2017 ICSV Det of Unb in A Ror BRG SystemDocument7 pages2017 ICSV Det of Unb in A Ror BRG SystemAka ShriNo ratings yet
- DQ+Bspline 1Document24 pagesDQ+Bspline 1Laila FouadNo ratings yet
- Mathematica Package For Analytical and ControlDocument12 pagesMathematica Package For Analytical and ControlHassan Ali KhanNo ratings yet
- MTHS111 Lesson2 2024Document34 pagesMTHS111 Lesson2 2024pearphelokazi45No ratings yet
- Modelica-Based Modeling and Simulation of Satellite On-Orbit Deployment and Attitude ControlDocument9 pagesModelica-Based Modeling and Simulation of Satellite On-Orbit Deployment and Attitude ControlGkkNo ratings yet
- Question BaNK (New) Soft Branches IVCSDocument7 pagesQuestion BaNK (New) Soft Branches IVCSpukkokignoNo ratings yet
- Calculus I: Assignment Problems Applications of DerivativesDocument37 pagesCalculus I: Assignment Problems Applications of DerivativesИРадојичићNo ratings yet
- Adaptive Noise CancellationDocument33 pagesAdaptive Noise Cancellationvaamarnath100% (2)
- The Structure of Determining Matrices For A Class of Double - Delay Control SystemsDocument18 pagesThe Structure of Determining Matrices For A Class of Double - Delay Control SystemsinventionjournalsNo ratings yet
- Mathematics Project SampleDocument10 pagesMathematics Project Sampletatojsjsj8No ratings yet
- M3Document108 pagesM3KishanJhaNo ratings yet
- An Overview On Tools From Functional Analysis: Matthias Augustin, Sarah Eberle, and Martin GrothausDocument35 pagesAn Overview On Tools From Functional Analysis: Matthias Augustin, Sarah Eberle, and Martin GrothaussergenNo ratings yet
- Some Simple Functions in The Complex PlaneDocument8 pagesSome Simple Functions in The Complex PlaneEpic WinNo ratings yet
- Maths ProjectDocument18 pagesMaths ProjectSanjay JindalNo ratings yet
- Trigonometry 2 Lecture Notes 2Document60 pagesTrigonometry 2 Lecture Notes 2leryNo ratings yet
- Topic 4 Graphs in Trigonometric FunctionsDocument16 pagesTopic 4 Graphs in Trigonometric FunctionslizetteNo ratings yet
- SCI.2. Optical Recursion Systems For The Hasimoto Map and Optical Application Wits s2Document11 pagesSCI.2. Optical Recursion Systems For The Hasimoto Map and Optical Application Wits s2Ahmet SAZAKNo ratings yet
- EISTI - Departement of Mathematics Q.F.R.M. M1 2014-15 An Introduction To Measure and IntegrationDocument33 pagesEISTI - Departement of Mathematics Q.F.R.M. M1 2014-15 An Introduction To Measure and IntegrationqwertyNo ratings yet
- Calculus - LP3 Unit 12Document11 pagesCalculus - LP3 Unit 12Razel Mae LaysonNo ratings yet
- Fiz117 NotebookDocument77 pagesFiz117 NotebookReact DeveloperNo ratings yet
- Application of Residue Theorem To Solve Several ReDocument7 pagesApplication of Residue Theorem To Solve Several ReJekkoi SihombingNo ratings yet
- New Chapter 7 Transcendental FunctionsDocument32 pagesNew Chapter 7 Transcendental FunctionsHarrdeep SinghNo ratings yet
- Geo MeanDocument14 pagesGeo MeanMiguel OrrilloNo ratings yet
- Recursive Least Squares Algorithm For Nonlinear Dual-Rate Systems Using Missing-Output Estimation ModelDocument20 pagesRecursive Least Squares Algorithm For Nonlinear Dual-Rate Systems Using Missing-Output Estimation ModelTín Trần TrungNo ratings yet
- Calcul DiffDocument38 pagesCalcul Difffakraouicpge2019No ratings yet
- 09 SS049Document14 pages09 SS049Út NhỏNo ratings yet
- Young H Kim - Ana Tameru - A Basic Approach To Precalculus Trigonometry - Preparing To Succeed in Calculus-Cognella Academic Publishing (2015)Document129 pagesYoung H Kim - Ana Tameru - A Basic Approach To Precalculus Trigonometry - Preparing To Succeed in Calculus-Cognella Academic Publishing (2015)Jovany Cruz RojasNo ratings yet
- s14 CompletareDocument14 pagess14 CompletareLaura NicoletaNo ratings yet
- Bellman, Lee - Functional Equations in Dynamic ProgrammingDocument18 pagesBellman, Lee - Functional Equations in Dynamic ProgrammingYermakov Vadim IvanovichNo ratings yet
- Quantum Mechanics, Fields and Symmetries: Giovanni GarberoglioDocument53 pagesQuantum Mechanics, Fields and Symmetries: Giovanni GarberoglioChristian L'importanteèloslapsulbasso DioguardiNo ratings yet
- Symbolic Integration Tutorial: Manuel - Bronstein@Document35 pagesSymbolic Integration Tutorial: Manuel - Bronstein@Lucas Gabriel CasagrandeNo ratings yet
- 1 6 Trigonometric Functions 1Document24 pages1 6 Trigonometric Functions 111No ratings yet
- Orthogonal Polynomials by Indre Skripkauskaite Supervised by Dr. Michael DreherDocument30 pagesOrthogonal Polynomials by Indre Skripkauskaite Supervised by Dr. Michael DreherIndre SkripkauskaiteNo ratings yet
- SoftFRAC Matlab Library For RealizationDocument10 pagesSoftFRAC Matlab Library For RealizationKotadai Le ZKNo ratings yet
- Application of ISO 25178 Standard For Multiscale 3Document7 pagesApplication of ISO 25178 Standard For Multiscale 3ThejaswiniNo ratings yet
- ExercisesDocument15 pagesExercisesMario XiaoNo ratings yet
- DCS Ground Charts v350Document34 pagesDCS Ground Charts v350lkjsdflkjNo ratings yet
- Response 2000 IntroductionDocument24 pagesResponse 2000 IntroductionRory Cristian Cordero RojoNo ratings yet
- SOL-Logarithm, Surds and IndicesDocument12 pagesSOL-Logarithm, Surds and Indicesdevli falduNo ratings yet
- Overleaf Keyboard ShortcutsDocument2 pagesOverleaf Keyboard ShortcutsAlberto GiudiciNo ratings yet
- MiningDocument3 pagesMiningDherick RaleighNo ratings yet
- Solved Consider Again The Demand Function For Corn in Formula 1Document1 pageSolved Consider Again The Demand Function For Corn in Formula 1M Bilal SaleemNo ratings yet
- WideScreen Code For PS2 GamesDocument78 pagesWideScreen Code For PS2 Gamesmarcus viniciusNo ratings yet
- Differential Settlement at Bridge ApproaDocument5 pagesDifferential Settlement at Bridge ApproaVictor De los ReyesNo ratings yet
- Critique of Violence - Walter BenjaminDocument14 pagesCritique of Violence - Walter BenjaminKazım AteşNo ratings yet
- Si2304 (Mosfet Sot 23)Document6 pagesSi2304 (Mosfet Sot 23)Alfredo Valencia RodriguezNo ratings yet
- Empowerment TechnologyDocument15 pagesEmpowerment Technologysxhan gwenNo ratings yet
- LogDocument67 pagesLogRudhi Al GhaisanNo ratings yet
- Alignment Technique - The Steam TurbineDocument2 pagesAlignment Technique - The Steam TurbineRajeswar KulanjiNo ratings yet
- Chess AI: Competing Paradigms For Machine Intelligence: Shiva Maharaj Nick Polson Alex TurkDocument15 pagesChess AI: Competing Paradigms For Machine Intelligence: Shiva Maharaj Nick Polson Alex TurkDomingo IslasNo ratings yet
- Alderamin On The Sky - Volume 7Document311 pagesAlderamin On The Sky - Volume 7Pedro SilvaNo ratings yet
- Silenat Berhanu SimaDocument6 pagesSilenat Berhanu SimaSilenat BerhanuNo ratings yet
- Miracle Mills 300 Series Hammer MillsDocument2 pagesMiracle Mills 300 Series Hammer MillsSNo ratings yet
- Wakit, Nico P.Document5 pagesWakit, Nico P.yeng botzNo ratings yet
- Q1 Practical Research 2 - Module 1bDocument15 pagesQ1 Practical Research 2 - Module 1bRhea Mae MacabodbodNo ratings yet
- Final FirstpartDocument11 pagesFinal FirstpartLance Johnpaul SyNo ratings yet
- Law of DemandDocument16 pagesLaw of DemandARUN KUMARNo ratings yet
- Rivers and Their Origin (Top MCQ)Document24 pagesRivers and Their Origin (Top MCQ)Anil Yadav100% (1)
- Motorola Talkabout T82 PDFDocument184 pagesMotorola Talkabout T82 PDFAlex TamayoNo ratings yet
- Compressor-Less: Historical ApplicationsDocument70 pagesCompressor-Less: Historical Applicationssuryakantshrotriya100% (1)
- Burnay, Bushman & Laroi - 2019Document10 pagesBurnay, Bushman & Laroi - 2019TinyjurshNo ratings yet