You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Balder AsDocument11 pagesBalder AsPaul Simon NacisNo ratings yet
- Protective Relay FundamentalsDocument95 pagesProtective Relay FundamentalsAnirban Bandyopadhyay50% (2)
- Protective Relaying Lecture - 2 - EditedDocument127 pagesProtective Relaying Lecture - 2 - EditedRaush100% (1)
- Over Current RelayDocument42 pagesOver Current Relayyousafali15100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Radio and TV Antenna Protection SystemDocument42 pagesRadio and TV Antenna Protection SystemBhanu Prakash100% (1)
- Empowering Networks: A Comprehensive Guide to Medium Voltage SwitchgearFrom EverandEmpowering Networks: A Comprehensive Guide to Medium Voltage SwitchgearNo ratings yet
- Protective Devices GuideDocument84 pagesProtective Devices Guideعزو عبدالكريم100% (1)
- Switch Gear and Protection Unit 1 by Ramu. SrikakulapuDocument75 pagesSwitch Gear and Protection Unit 1 by Ramu. SrikakulapuAnkit RohatgiNo ratings yet
- Introduction To Protective RelayingDocument2 pagesIntroduction To Protective Relayingboopathi1986No ratings yet
- Report On Radial Feeder ProtectionDocument15 pagesReport On Radial Feeder ProtectionHarshit SharmaNo ratings yet
- Protective RelayDocument4 pagesProtective RelayBaquiran John Paul BaquiranNo ratings yet
- Components of Power System Protection SchemesDocument36 pagesComponents of Power System Protection SchemesAhmed FaragNo ratings yet
- Re LAYDocument98 pagesRe LAYzsoso1796No ratings yet
- Introduction To Protective RelayingDocument3 pagesIntroduction To Protective RelayingVikas GuptaNo ratings yet
- Op-Amp Based Static Over Current RelayDocument6 pagesOp-Amp Based Static Over Current RelayS Bharadwaj ReddyNo ratings yet
- Lecture On System ProtectionDocument33 pagesLecture On System ProtectionTushar KadamNo ratings yet
- A. Basic Relaying Fundamentals-1.1Document129 pagesA. Basic Relaying Fundamentals-1.1George Asuncion100% (1)
- ET601 - Chapter 1Document25 pagesET601 - Chapter 1Thanaletchumy RamesamyNo ratings yet
- Distribution System RelayDocument21 pagesDistribution System RelayDev KumarNo ratings yet
- Practical 01 Introduction To ProtectionDocument5 pagesPractical 01 Introduction To Protectionmanan desaiNo ratings yet
- Protective Relays: B.TECH/EE/EE-602Document4 pagesProtective Relays: B.TECH/EE/EE-602Amit DebnathNo ratings yet
- Overview of Power System ProtectionDocument20 pagesOverview of Power System ProtectionTana AzeezNo ratings yet
- BY Ramu Srikakulapu Assistant Professor Sharda UniversityDocument73 pagesBY Ramu Srikakulapu Assistant Professor Sharda UniversitySaurabh YadavNo ratings yet
- Unit 1Document26 pagesUnit 1chintuchetan123No ratings yet
- Notes Switchgear and Protection Unit 2Document32 pagesNotes Switchgear and Protection Unit 2Pratik SinghNo ratings yet
- Power System RelayingDocument22 pagesPower System RelayingKhairul AshrafNo ratings yet
- Background Theory of Electrical SubstationsDocument24 pagesBackground Theory of Electrical SubstationsMoe Thant OoNo ratings yet
- Report On Radial Feeder ProtectionDocument20 pagesReport On Radial Feeder ProtectionSubhamGangdeb78% (9)
- Basic and Principle of RelaysDocument38 pagesBasic and Principle of Relaysbijoy100% (1)
- Chp-1-Part-1 Fund. of Protection and RelaysDocument97 pagesChp-1-Part-1 Fund. of Protection and RelaysSentex Habasha100% (1)
- O&M of Protection Systems and Relay Coordination GuideDocument72 pagesO&M of Protection Systems and Relay Coordination GuideAlejandro Ramirez Benites100% (2)
- Power Plant ProtectionDocument0 pagesPower Plant ProtectionSHIVAJI CHOUDHURY100% (7)
- The Role of Low Voltage Switchgear in An Electrical SystemDocument4 pagesThe Role of Low Voltage Switchgear in An Electrical SystemKushagra BaliNo ratings yet
- Power System Protection Studies and Relay CoordinationDocument9 pagesPower System Protection Studies and Relay CoordinationJeya Kannan100% (1)
- Chapter 1Document20 pagesChapter 1Mosab SalamaNo ratings yet
- PDF Split PDFDocument24 pagesPDF Split PDFAayush guptaNo ratings yet
- Power System Protection Devices: Prakash KumarDocument27 pagesPower System Protection Devices: Prakash KumarLadyganome NoNo ratings yet
- GET6600G Section 5 Rev 1 BookmarksDocument10 pagesGET6600G Section 5 Rev 1 BookmarksMahmoud AbuziadNo ratings yet
- Adroit Control Engineers Services OfferedDocument19 pagesAdroit Control Engineers Services OfferedAntarika BaruahNo ratings yet
- Principles and Philosophy of Protective RelayingDocument47 pagesPrinciples and Philosophy of Protective Relayingwasonmwonriri5620100% (1)
- PSP 02Document60 pagesPSP 02faizanNo ratings yet
- Protective Relays Functions GuideDocument4 pagesProtective Relays Functions GuideignaciodominguezNo ratings yet
- Electric Power System Protection BasicsDocument12 pagesElectric Power System Protection Basicseuge sylNo ratings yet
- Protective RelaysDocument33 pagesProtective RelaysThotakura Nsc SekharNo ratings yet
- Protect loads from over and under voltagesDocument6 pagesProtect loads from over and under voltagesRika Elvan YulindaNo ratings yet
- 1MRG001023 en The Design of A Modern Protection System For A Static Var orDocument6 pages1MRG001023 en The Design of A Modern Protection System For A Static Var orzaidisofianNo ratings yet
- 2 - 4 Protective RelaysDocument3 pages2 - 4 Protective RelaysMrNo ratings yet
- Fundamentals of Protection PracticeDocument20 pagesFundamentals of Protection PracticealisolmazNo ratings yet
- Relay Circuit Breaker ApplicationDocument58 pagesRelay Circuit Breaker Applicationtenk_manNo ratings yet
- Lab Notes Overcurrent GroundFault Protection v1Document7 pagesLab Notes Overcurrent GroundFault Protection v1srinivasaphanikiranNo ratings yet
- Power System Protection NewDocument79 pagesPower System Protection NewrameshsmeNo ratings yet
- Protective Devices - SETH LAMINADocument20 pagesProtective Devices - SETH LAMINASeth LaminaNo ratings yet
- Performance Tests For Protection Devices - MR ZALPYSDocument21 pagesPerformance Tests For Protection Devices - MR ZALPYSSalah SallamNo ratings yet
- Extra Low Voltage and TerminologyDocument15 pagesExtra Low Voltage and TerminologyNaanaa PalaniNo ratings yet
- Fundamentals of Modern Electrical Substations - Part 2 - R2Document22 pagesFundamentals of Modern Electrical Substations - Part 2 - R2Harish De SilvaNo ratings yet
- Motor ProtectionDocument33 pagesMotor ProtectionMohamed RashidNo ratings yet
- Why Static ExcitationDocument15 pagesWhy Static ExcitationMohamed RashidNo ratings yet
- Parallel Operation With A Network SystemDocument27 pagesParallel Operation With A Network Systemsaulcastano6556100% (3)
- 11 Power System Stability PDFDocument23 pages11 Power System Stability PDFvgarudaNo ratings yet
- Digital Excitation TechnologyDocument11 pagesDigital Excitation TechnologyMohamed RashidNo ratings yet
- Basic GoverningDocument24 pagesBasic GoverningMohamed RashidNo ratings yet
- Closed Loop SystemsDocument11 pagesClosed Loop SystemsMohamed RashidNo ratings yet
- Intro SynchDocument21 pagesIntro SynchMohamed RashidNo ratings yet
- Distributed GenerationDocument14 pagesDistributed GenerationMohamed RashidNo ratings yet
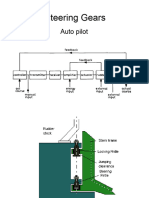
- Steering GearsDocument34 pagesSteering GearsMohamed RashidNo ratings yet
- How To Implement Maintenance Planning & SchedulingDocument18 pagesHow To Implement Maintenance Planning & SchedulingIrete FemiNo ratings yet
- Presentation 5 1Document76 pagesPresentation 5 1Anshul SinghNo ratings yet
- Worksheet Mendel's LawsDocument3 pagesWorksheet Mendel's LawsAkito NikamuraNo ratings yet
- Towards Innovative Community Building: DLSU Holds Henry Sy, Sr. Hall GroundbreakingDocument2 pagesTowards Innovative Community Building: DLSU Holds Henry Sy, Sr. Hall GroundbreakingCarl ChiangNo ratings yet
- Os Ass-1 PDFDocument18 pagesOs Ass-1 PDFDinesh R100% (1)
- CRT 48-35L PS EuDocument35 pagesCRT 48-35L PS Eujose alvaradoNo ratings yet
- VISAYAS STATE UNIVERSITY Soil Science Lab on Rocks and MineralsDocument5 pagesVISAYAS STATE UNIVERSITY Soil Science Lab on Rocks and MineralsAleah TyNo ratings yet
- BPSM Strategic Management ProcessDocument4 pagesBPSM Strategic Management ProcessFaiyaz panchbhayaNo ratings yet
- Materiality of Cultural ConstructionDocument3 pagesMateriality of Cultural ConstructionPaul YeboahNo ratings yet
- Net CallDocument2 pagesNet CallFerdinand Monte Jr.100% (2)
- Teaching Speaking: Daily Activities Lesson PlanDocument3 pagesTeaching Speaking: Daily Activities Lesson PlanMARCELANo ratings yet
- Sketch 5351a Lo LCD Key Uno 1107Document14 pagesSketch 5351a Lo LCD Key Uno 1107nobcha aNo ratings yet
- Modular Kitchen AnalysisDocument3 pagesModular Kitchen AnalysisGhanithan SubramaniamNo ratings yet
- Lamosa CatalogoDocument51 pagesLamosa CatalogoSofi SamareitesNo ratings yet
- Limit of Outside Usage Outside Egypt ENDocument1 pageLimit of Outside Usage Outside Egypt ENIbrahem EmamNo ratings yet
- Jallikattu: Are Caste and Gender the Real Bulls to TameDocument67 pagesJallikattu: Are Caste and Gender the Real Bulls to TameMALLIKA NAGLENo ratings yet
- Contingency PlanDocument1 pageContingency PlanPramod Bodne100% (3)
- Pragmatics: The Study of Its Historical Overview, Meanings, Scope and The Context in Language UseDocument7 pagesPragmatics: The Study of Its Historical Overview, Meanings, Scope and The Context in Language UseIHINOSEN IYOHANo ratings yet
- PreviewpdfDocument68 pagesPreviewpdfwong alusNo ratings yet
- Details of Nodal Officer - HD Officers of Other DepttDocument46 pagesDetails of Nodal Officer - HD Officers of Other DepttManoj KashyapNo ratings yet
- ICT - 81 - F32A - ISO - 13485 - and - MDD - IVDD - Checklist - Rev1 - 01.05.2020 - ALAMIN (1) (Recovered)Document41 pagesICT - 81 - F32A - ISO - 13485 - and - MDD - IVDD - Checklist - Rev1 - 01.05.2020 - ALAMIN (1) (Recovered)Basma ashrafNo ratings yet
- An Approach To Predict The Failure of Water Mains Under Climatic VariationsDocument16 pagesAn Approach To Predict The Failure of Water Mains Under Climatic VariationsGeorge, Yonghe YuNo ratings yet
- Rizal's Works Inspire Filipino PrideDocument2 pagesRizal's Works Inspire Filipino PrideItzLian SanchezNo ratings yet
- ST5DB Skylake U Platform Block Diagram TitleDocument82 pagesST5DB Skylake U Platform Block Diagram TitleJOSE PAZNo ratings yet
- PR1 Module 2Document12 pagesPR1 Module 2Ervin GonzalesNo ratings yet
- Mil PRF 23699FDocument20 pagesMil PRF 23699FalejandroNo ratings yet
- H Configurations V12 enDocument37 pagesH Configurations V12 enJerald SlaterNo ratings yet
- Econometrics IIDocument4 pagesEconometrics IINia Hania SolihatNo ratings yet
- SWAYAM PRABHA 32+ Educational DTH ChannelsDocument2 pagesSWAYAM PRABHA 32+ Educational DTH Channelsలక్ష్మీ సుబ్రహ్మణ్యం పుల్లెలNo ratings yet
- DIK 18A Intan Suhariani 218112100 CJR Research MethodologyDocument9 pagesDIK 18A Intan Suhariani 218112100 CJR Research MethodologyFadli RafiNo ratings yet
- Improving Performance With Goals、Feedback、Reward、and Positive ReinforcementDocument15 pagesImproving Performance With Goals、Feedback、Reward、and Positive ReinforcementMichelle HuwaeNo ratings yet
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxFrom EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNo ratings yet
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)From EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Rating: 5 out of 5 stars5/5 (2)
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)From EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Rating: 5 out of 5 stars5/5 (1)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- Model-based System and Architecture Engineering with the Arcadia MethodFrom EverandModel-based System and Architecture Engineering with the Arcadia MethodNo ratings yet
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- From Cell Phones to VOIP: The Evolution of Communication Technology - Technology Books | Children's Reference & NonfictionFrom EverandFrom Cell Phones to VOIP: The Evolution of Communication Technology - Technology Books | Children's Reference & NonfictionNo ratings yet
- Computer Science: A Concise IntroductionFrom EverandComputer Science: A Concise IntroductionRating: 4.5 out of 5 stars4.5/5 (14)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- 2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersFrom Everand2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersNo ratings yet
- The No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesFrom EverandThe No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesNo ratings yet
- Dancing with Qubits: How quantum computing works and how it can change the worldFrom EverandDancing with Qubits: How quantum computing works and how it can change the worldRating: 5 out of 5 stars5/5 (1)
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionFrom EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionRating: 5 out of 5 stars5/5 (2)