You might also like
- Analyzing and Designing Castellated Beams in STAAD.ProDocument13 pagesAnalyzing and Designing Castellated Beams in STAAD.ProLukman Nul HakimNo ratings yet
- 04 Trave Mista - Straus7Document12 pages04 Trave Mista - Straus7lupin2013No ratings yet
- Buckling and Lateral Buckling WarehouseDocument8 pagesBuckling and Lateral Buckling WarehouseFatra FuhlerNo ratings yet
- STRAP - Manual Strap 2017 - MÓDULO PROTENDIDODocument53 pagesSTRAP - Manual Strap 2017 - MÓDULO PROTENDIDOMarcos SouzaNo ratings yet
- Cypecad Vs Etabs En2 BisDocument34 pagesCypecad Vs Etabs En2 BisidalicarNo ratings yet
- Design of Columns To EurocodeDocument19 pagesDesign of Columns To EurocodeKasun Karunaratne92% (13)
- Steel Connection Design Using ProkonDocument50 pagesSteel Connection Design Using Prokonapirakq100% (4)
- Important Topics in Civil Engineering (Eng. Anas Dawas)Document198 pagesImportant Topics in Civil Engineering (Eng. Anas Dawas)Mohamed AamerNo ratings yet
- Eurocode: 1.0 Column DesignDocument5 pagesEurocode: 1.0 Column DesignsopnanairNo ratings yet
- Modeling - Rigid End OffsetsDocument7 pagesModeling - Rigid End OffsetsAnonymous DNb6yWERfB100% (1)
- SBE SS5 SecureDocument131 pagesSBE SS5 SecureSergio ValeNo ratings yet
- Plate Results and Design ForcesDocument10 pagesPlate Results and Design Forcesthirumalaichettiar100% (1)
- Hot Rolled Steel - Composite Beam Design OverviewDocument7 pagesHot Rolled Steel - Composite Beam Design Overviewsrikanth.iitkgpNo ratings yet
- Design Aids For Tension Members As Per Revised Is: 800-2007Document7 pagesDesign Aids For Tension Members As Per Revised Is: 800-2007dev_1989No ratings yet
- Effective Length Calculations (Walls BS 8110) PDFDocument2 pagesEffective Length Calculations (Walls BS 8110) PDFdhanya1995No ratings yet
- Etabs Tips: Choose Mesh Wall For Openings Edit Mesh AreasDocument27 pagesEtabs Tips: Choose Mesh Wall For Openings Edit Mesh AreasRohit Y100% (1)
- Flat Slab-PPt-By Habtamu T.Document39 pagesFlat Slab-PPt-By Habtamu T.paulos dagnaw67% (3)
- Design of Steel Compression MembersDocument48 pagesDesign of Steel Compression MembersShivang VivekNo ratings yet
- Finite Element Strip Design MethodDocument5 pagesFinite Element Strip Design MethodStevenNo ratings yet
- T BeamDocument17 pagesT BeamKlefa KlefaNo ratings yet
- PTI EDC-130 Analysis of Continuous Post-Tensioned SpansDocument41 pagesPTI EDC-130 Analysis of Continuous Post-Tensioned SpansKhaled AbdelbakiNo ratings yet
- Lecture 2 Part A-LibreDocument22 pagesLecture 2 Part A-LibreBelinda DawsonNo ratings yet
- TDS Lec 6Document94 pagesTDS Lec 6YAHAMPATH ARACHCHIGE PASAN MADURA YahampathNo ratings yet
- Analysis Assignment 2 - 2021Document8 pagesAnalysis Assignment 2 - 2021kameshNo ratings yet
- Power Transformer Design, Manufacturing and TestingDocument19 pagesPower Transformer Design, Manufacturing and TestingAbd ALRahmanNo ratings yet
- TEnsion MembersDocument24 pagesTEnsion MembersJade CarilloNo ratings yet
- Time Saving-Two Way2Document9 pagesTime Saving-Two Way2Wanda Beasley100% (1)
- Steel Chap5 Ultimate Limit StateDocument35 pagesSteel Chap5 Ultimate Limit StateMesfin Derbew86% (7)
- Pratical Guidance For Design of Buildings1 Compatibility Mode 653Document67 pagesPratical Guidance For Design of Buildings1 Compatibility Mode 653Satya Yugandhar GannamaniNo ratings yet
- Concrete Beam Design ACI 318Document7 pagesConcrete Beam Design ACI 318Kutty MansoorNo ratings yet
- Ethics Team 26Document13 pagesEthics Team 26Kareem MagdyNo ratings yet
- Adapt PT Tutorial Beam FrameDocument22 pagesAdapt PT Tutorial Beam FrameHai NguyenNo ratings yet
- Moment RedistributionDocument8 pagesMoment RedistributionsravanNo ratings yet
- Concrete Beam and Slab Design Using ProkonDocument34 pagesConcrete Beam and Slab Design Using ProkonChamila Kumara Rankoth100% (3)
- Technical Note Wall Pier Flexural Design: S W D ACI 318-02Document19 pagesTechnical Note Wall Pier Flexural Design: S W D ACI 318-02tomxxx34No ratings yet
- Structural Steel Design: Eng Fuad Dhunkal in Civil EngineeringDocument18 pagesStructural Steel Design: Eng Fuad Dhunkal in Civil Engineeringfuaad dhunkaalNo ratings yet
- Asdip ConcreteDocument3 pagesAsdip ConcreteRomani Noel S. Chavez Jr.No ratings yet
- Design Continuous Concrete Beams with ASDIP CONCRETEDocument3 pagesDesign Continuous Concrete Beams with ASDIP CONCRETERomani Noel S. Chavez Jr.No ratings yet
- Design of Pile Caps FinalDocument50 pagesDesign of Pile Caps FinalImam Shakil100% (2)
- Concrete Beam DesignDocument3 pagesConcrete Beam DesignVinoth KumarNo ratings yet
- 01-Two Way SlabsDocument31 pages01-Two Way SlabsMouhamad WehbeNo ratings yet
- Cypecad Vs Etabs - En2Document33 pagesCypecad Vs Etabs - En2dskumar49100% (2)
- CVX7640 28Document18 pagesCVX7640 28malingauomNo ratings yet
- ETABS Users Manual Frame Rigid Offset AssignmentsDocument5 pagesETABS Users Manual Frame Rigid Offset AssignmentsvardogerNo ratings yet
- Flat SlabDocument33 pagesFlat SlabHelen Negash100% (1)
- Engr. Suñega - 2wayslab-DdmDocument31 pagesEngr. Suñega - 2wayslab-DdmJustinNo ratings yet
- Tension MemberDocument35 pagesTension MemberLUGHANO NGAJILONo ratings yet
- TutorialDocument11 pagesTutorialJarrad PhelpsNo ratings yet
- 8/1/13 Beam Part 2Document50 pages8/1/13 Beam Part 2Macqui MaciasNo ratings yet
- Mech3300 Computer Tutorial 1Document5 pagesMech3300 Computer Tutorial 1majin_andrewNo ratings yet
- Lecture 3 Tension MembersDocument28 pagesLecture 3 Tension MembersLhee Ann GarboNo ratings yet
- Composite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsFrom EverandComposite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- A Classification System to Describe Workpieces: DefinitionsFrom EverandA Classification System to Describe Workpieces: DefinitionsW. R. MacconnellNo ratings yet
- Reinforced Concrete Buildings: Behavior and DesignFrom EverandReinforced Concrete Buildings: Behavior and DesignRating: 5 out of 5 stars5/5 (1)
- Link Do en StandardiDocument1 pageLink Do en StandardiMarija DocevskaNo ratings yet
- Prestressed Ideterminate StructuresDocument18 pagesPrestressed Ideterminate StructuresFady Abdel AzizNo ratings yet
- M 1: 1164 X Y Z Beam Elements, Maximum Tensile Stress, Design Case 7109 Sum - 109 C+S, Point BDL, 1 CM 3D 2.00 Mpa (Min - 1.28) (Max 2.56)Document1 pageM 1: 1164 X Y Z Beam Elements, Maximum Tensile Stress, Design Case 7109 Sum - 109 C+S, Point BDL, 1 CM 3D 2.00 Mpa (Min - 1.28) (Max 2.56)Marija DocevskaNo ratings yet
- 03 - Prilog Za Kolokvium 2Document1 page03 - Prilog Za Kolokvium 2Marija DocevskaNo ratings yet
- M 1: 1164 X Y Z Beam Elements, Maximum Tensile Stress, Design Case 7125 Sum - 125 C+S Infinite, Point TDL, 1 CM 3D 9.02 Mpa (Min - 0.890) (Max 8.36)Document1 pageM 1: 1164 X Y Z Beam Elements, Maximum Tensile Stress, Design Case 7125 Sum - 125 C+S Infinite, Point TDL, 1 CM 3D 9.02 Mpa (Min - 0.890) (Max 8.36)Marija DocevskaNo ratings yet
- Creep PDFDocument3 pagesCreep PDFTejas SawantNo ratings yet
- σc(t15') Data AnalysisDocument3 pagesσc(t15') Data AnalysisMarija DocevskaNo ratings yet
- M 1: 1164 X Y Z Beam Elements, Maximum Tensile Stress, Design Case 7109 Sum - 109 C+S, Point BDL, 1 CM 3D 2.00 Mpa (Min - 1.28) (Max 2.56)Document1 pageM 1: 1164 X Y Z Beam Elements, Maximum Tensile Stress, Design Case 7109 Sum - 109 C+S, Point BDL, 1 CM 3D 2.00 Mpa (Min - 1.28) (Max 2.56)Marija DocevskaNo ratings yet
- Buuco Gvÿ Nugt O + Fce O Ug: S T U+ Ÿ 6Ÿ VW, Xe XyDocument2 pagesBuuco Gvÿ Nugt O + Fce O Ug: S T U+ Ÿ 6Ÿ VW, Xe XyMarija DocevskaNo ratings yet
- Analyzing financial data trendsDocument1 pageAnalyzing financial data trendsMarija DocevskaNo ratings yet
- 08 - Formuli str.46 Do str.60 (Betonske Konstrukcije 2)Document3 pages08 - Formuli str.46 Do str.60 (Betonske Konstrukcije 2)Marija DocevskaNo ratings yet
- Answer To Reviewer#1Document1 pageAnswer To Reviewer#1Marija DocevskaNo ratings yet
- 01 - Konstrukcija Vklestena Kaj TemeliteDocument6 pages01 - Konstrukcija Vklestena Kaj TemeliteMarija DocevskaNo ratings yet
- 01 - Vklestena Kaj TemeliteDocument6 pages01 - Vklestena Kaj TemeliteMarija DocevskaNo ratings yet
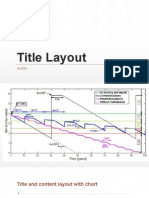
- Title Layout: SubtitleDocument11 pagesTitle Layout: SubtitleMarija DocevskaNo ratings yet
- Analyzing financial data trendsDocument1 pageAnalyzing financial data trendsMarija DocevskaNo ratings yet
- Analyzing financial data trendsDocument1 pageAnalyzing financial data trendsMarija DocevskaNo ratings yet
- VersionsmatrixDocument1 pageVersionsmatrixMarija DocevskaNo ratings yet
- 000Document1 page000Marija DocevskaNo ratings yet
- 03 - Zategnuvanje Na 2-Ot Nadvoresen KabelDocument1 page03 - Zategnuvanje Na 2-Ot Nadvoresen KabelMarija DocevskaNo ratings yet
- Mageba Structural Bearings - Mastering Loads and MovementsDocument4 pagesMageba Structural Bearings - Mastering Loads and MovementsMarija DocevskaNo ratings yet
- 03 - Zategnuvanje Na 2-Ot Nadvoresen KabelDocument1 page03 - Zategnuvanje Na 2-Ot Nadvoresen KabelMarija DocevskaNo ratings yet
- 3Document1 page3Marija DocevskaNo ratings yet
- Armstrong ANFDocument2 pagesArmstrong ANFBramandito DamarNo ratings yet
- E-RPMS PORTFOLIO (Design 3)_DepEdClickDocument51 pagesE-RPMS PORTFOLIO (Design 3)_DepEdClickauhsoj raluigaNo ratings yet
- Zinc Clad II (85) : Inorganic Zinc Rich CoatingDocument2 pagesZinc Clad II (85) : Inorganic Zinc Rich CoatingKatherine Marimón JiménezNo ratings yet
- EIA Case Study of Highway Project WideningDocument10 pagesEIA Case Study of Highway Project WideningSRUTHI FRANCIS M.Tech Environmental Engineering 2020-2022No ratings yet
- PGDM-IIPR Final Research Based ReportDocument9 pagesPGDM-IIPR Final Research Based Reportnavneet dubeyNo ratings yet
- Introduction to Capacitors and DielectricsDocument55 pagesIntroduction to Capacitors and DielectricsParthuNo ratings yet
- 199 - R.O. Burt - C. Mills - Gravity Concentration 1000 Years Old and Still OmprovingDocument10 pages199 - R.O. Burt - C. Mills - Gravity Concentration 1000 Years Old and Still OmprovingMaría Alejandra Vera BurauNo ratings yet
- Amazon Food Review Clustering Using K-Means, Agglomerative & DBSCANDocument79 pagesAmazon Food Review Clustering Using K-Means, Agglomerative & DBSCANkrishnaNo ratings yet
- Add Math SbaDocument17 pagesAdd Math SbaYana TvNo ratings yet
- An Ecological Approach For Social Work PracticeDocument11 pagesAn Ecological Approach For Social Work PracticeJona MempinNo ratings yet
- In Corean-JKoreanTunnelUndergrSpacAssoc-v15n6-2013-EvaluationRockLoadBasedCriticalShearStrainConceptTunnels-Kim Et AlDocument17 pagesIn Corean-JKoreanTunnelUndergrSpacAssoc-v15n6-2013-EvaluationRockLoadBasedCriticalShearStrainConceptTunnels-Kim Et AlClovis GonzattiNo ratings yet
- Lab 4B Moles of Iron and CopperDocument6 pagesLab 4B Moles of Iron and CopperLaura Sitar0% (1)
- BV Endura R2.3Document10 pagesBV Endura R2.3OMAR GONZALEZNo ratings yet
- Test Specification: iUBT435 - Anatomy and PhysiologyDocument3 pagesTest Specification: iUBT435 - Anatomy and PhysiologyVicki TseNo ratings yet
- Probability Spinner WorksheetDocument2 pagesProbability Spinner WorksheetSara ShaiboonNo ratings yet
- DLP For UCSPDocument6 pagesDLP For UCSPruth taccadNo ratings yet
- Automatic Optimization and Elastic ConstantsDocument15 pagesAutomatic Optimization and Elastic ConstantsFebriman ZendratoNo ratings yet
- Publikasi Ketujuh TF-CCRDocument6 pagesPublikasi Ketujuh TF-CCRRiny AgustinNo ratings yet
- Geology Lesson PlanDocument6 pagesGeology Lesson Planapi-501773574No ratings yet
- Value Based MalaysiaDocument14 pagesValue Based MalaysiaabduNo ratings yet
- Avian 48 Guide PDFDocument8 pagesAvian 48 Guide PDFEng-Mohamed Zakria ElbadryNo ratings yet
- Exam 2020-2021Document8 pagesExam 2020-2021Rawan ToubarNo ratings yet
- Demystifying Interventional Radiology A Guide For Medical StudentsDocument195 pagesDemystifying Interventional Radiology A Guide For Medical StudentsMo Haroon100% (1)
- Graduate School: Mariano Marcos State UniversityDocument2 pagesGraduate School: Mariano Marcos State UniversityLeslie Anne BiteNo ratings yet
- Ultra Low Dose CT Vs Chest X Ray in Non Traumatic Emergency D 2023 EClinicaDocument14 pagesUltra Low Dose CT Vs Chest X Ray in Non Traumatic Emergency D 2023 EClinicaronaldquezada038No ratings yet
- ANZ Aboriginal history, culture, and demographicsDocument13 pagesANZ Aboriginal history, culture, and demographicsЛада ПоселянинаNo ratings yet
- School of Engineering Department of Mechanical EngineeringDocument17 pagesSchool of Engineering Department of Mechanical EngineeringMohammed KawashNo ratings yet
- Mathematics Reference Books: No. Name Author PublisherDocument1 pageMathematics Reference Books: No. Name Author PublisherDelicateDogNo ratings yet
- Visual Division-1Document3 pagesVisual Division-1Jumran BaharNo ratings yet
- Small Sewage Treatment Plant PDFDocument44 pagesSmall Sewage Treatment Plant PDFNGUYEN EthanNo ratings yet