You might also like
- Lab2 Resistors Network and Wheatstone BridgeDocument8 pagesLab2 Resistors Network and Wheatstone BridgeJames Brian0% (1)
- Testing of MiCOM P643Document33 pagesTesting of MiCOM P643santhosh100% (6)
- Unimat 50Document31 pagesUnimat 50Francisco Diaz50% (2)
- 2017 - OPUS Quant Advanced PDFDocument205 pages2017 - OPUS Quant Advanced PDFIngeniero Alfonzo Díaz Guzmán100% (1)
- Unit II Chapter 9: Vibration Control: UE15ME352: Mechanical Vibrations Question Bank: Partial SolutionsDocument11 pagesUnit II Chapter 9: Vibration Control: UE15ME352: Mechanical Vibrations Question Bank: Partial SolutionsNABIL HUSSAINNo ratings yet
- PolarplotDocument14 pagesPolarplotGeethakshayaNo ratings yet
- exper#4 earth fault relay (3) -محولDocument5 pagesexper#4 earth fault relay (3) -محولarwa zeglamNo ratings yet
- 546 MicomDocument37 pages546 MicomNambiNo ratings yet
- Giovanni Papio FABE 3150-System Dynamics and Electricity Dr. Lichtensteiger 23 March 2017Document4 pagesGiovanni Papio FABE 3150-System Dynamics and Electricity Dr. Lichtensteiger 23 March 2017api-352575896No ratings yet
- Mathematical Modeling and Simulation of SAS System With Magnetorheological (MR) DamperDocument26 pagesMathematical Modeling and Simulation of SAS System With Magnetorheological (MR) DamperRafli AlnursyahNo ratings yet
- IpsDocument11 pagesIpsRushik SantokiNo ratings yet
- Expt 4 Caliberation of Force SensorDocument5 pagesExpt 4 Caliberation of Force SensormijasofoNo ratings yet
- ET8304 Lecture4 2022Document23 pagesET8304 Lecture4 2022Rizwan RafiqueNo ratings yet
- Modification Factor: Example of A Two-Story Unreinforced Masonry Building Retrofitted by ShotcreteDocument13 pagesModification Factor: Example of A Two-Story Unreinforced Masonry Building Retrofitted by ShotcretevatsalNo ratings yet
- Unit 2: Compensator DesignDocument49 pagesUnit 2: Compensator Designharish9No ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Experiment: Schematic of Linear Variable Differential Transformer (LVDT)Document15 pagesExperiment: Schematic of Linear Variable Differential Transformer (LVDT)sivasunnalaNo ratings yet
- BEEE Lab Manual - BT104 - Readings - 1625301921Document8 pagesBEEE Lab Manual - BT104 - Readings - 1625301921sid mankarNo ratings yet
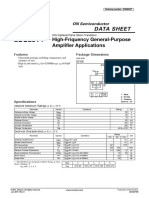
- High-Friquency General-Purpose Amplifier Applications: Package Dimensions FeaturesDocument5 pagesHigh-Friquency General-Purpose Amplifier Applications: Package Dimensions FeaturesArturo ArmuellesNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Ag2000-12 20170214Document26 pagesAg2000-12 20170214cheloniaqNo ratings yet
- Digital Comm Lab 4 PDFDocument11 pagesDigital Comm Lab 4 PDFTalha YILMAZNo ratings yet
- Lecture-4 - S - Plane - Design Nust Masters 2022Document74 pagesLecture-4 - S - Plane - Design Nust Masters 2022Owais JafriNo ratings yet
- Eeb - 331 - Lab - 2 RayDocument9 pagesEeb - 331 - Lab - 2 RayAravis LeatileNo ratings yet
- Evaluation Scheme & Syllabus For B.Tech. First Year: Dr. A.P.J. Abdul Kalam Technical University LucknowDocument20 pagesEvaluation Scheme & Syllabus For B.Tech. First Year: Dr. A.P.J. Abdul Kalam Technical University LucknowAvnishNo ratings yet
- Agriculture PDFDocument20 pagesAgriculture PDFAvnishNo ratings yet
- PR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Document13 pagesPR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Armando MaloneNo ratings yet
- ECE531 Screencast 2.1: Introduction To The Cramer-Rao Lower Bound (CRLB)Document5 pagesECE531 Screencast 2.1: Introduction To The Cramer-Rao Lower Bound (CRLB)Karthik Mohan KNo ratings yet
- Digital Control Systems (DCS) : Lecture-1-2 Lead CompensationDocument61 pagesDigital Control Systems (DCS) : Lecture-1-2 Lead CompensationMeer Zafarullah NoohaniNo ratings yet
- Antimony in Steel Best ConcDocument7 pagesAntimony in Steel Best ConcRinku SingrohaNo ratings yet
- Saftswit Magnetic Psen2.1p-30 DatDocument6 pagesSaftswit Magnetic Psen2.1p-30 DattarekaneNo ratings yet
- PNOZ s4 Safety Relay Magnetic SwitchDocument6 pagesPNOZ s4 Safety Relay Magnetic Switchdalitso ngomaNo ratings yet
- Electromagnetism Laboratory Experiment 1 Determination of Inductance in An LR CircuitDocument10 pagesElectromagnetism Laboratory Experiment 1 Determination of Inductance in An LR CircuitAryan yadavNo ratings yet
- Sensor Magnetico Pilz Psen 1.2p-201.2-208mmDocument6 pagesSensor Magnetico Pilz Psen 1.2p-201.2-208mmAdan LeytonNo ratings yet
- Flux Gate Sensor Analysis PDFDocument17 pagesFlux Gate Sensor Analysis PDFmayaNo ratings yet
- Electric FieldsDocument44 pagesElectric Fieldsayaliya6No ratings yet
- Control Systems I: CompensationDocument47 pagesControl Systems I: Compensationi dint knowNo ratings yet
- 351 - 27435 - EE411 - 2015 - 1 - 1 - 1 - 0 3 EE411 Lec6,7 Compensation RLDocument47 pages351 - 27435 - EE411 - 2015 - 1 - 1 - 1 - 0 3 EE411 Lec6,7 Compensation RLMohamed SaeedNo ratings yet
- Experimental Validation of Superposition TheoremDocument4 pagesExperimental Validation of Superposition TheoremMalik Abdul MajeedNo ratings yet
- Exam RT1 2011 1 enDocument13 pagesExam RT1 2011 1 enArmando MaloneNo ratings yet
- Understanding The Element-Gain Paradox For Receiving Arrays Using Poynting StreamlinesDocument3 pagesUnderstanding The Element-Gain Paradox For Receiving Arrays Using Poynting StreamlinesTommy AsselinNo ratings yet
- Lab ReportDocument5 pagesLab Reportmoslahuddin2022No ratings yet
- 351 - 27435 - EE419 - 2016 - 1 - 2 - 1 - 0 3 EE419 Lec6,7 Compensation RLDocument47 pages351 - 27435 - EE419 - 2016 - 1 - 2 - 1 - 0 3 EE419 Lec6,7 Compensation RLtsegayNo ratings yet
- Lec8 Numerical Distance ProtectionDocument24 pagesLec8 Numerical Distance ProtectionEVTNo ratings yet
- Activity StatDocument7 pagesActivity Statabdurakibtingsonjalilul.iiNo ratings yet
- 2SA1371 SanyoSemiconDeviceDocument5 pages2SA1371 SanyoSemiconDeviceNam TàoNo ratings yet
- 9UGDocument7 pages9UGAnuj PatelNo ratings yet
- Control Systems Course RoadmapDocument5 pagesControl Systems Course RoadmapRezkodaNo ratings yet
- Low-Frequency Power Amplifier Applications: 2SA1705/2SC4485Document4 pagesLow-Frequency Power Amplifier Applications: 2SA1705/2SC4485billNo ratings yet
- Electrical Systems Simulation LAB MANUAL 2019-2020Document25 pagesElectrical Systems Simulation LAB MANUAL 2019-2020Vinay Kumar50% (2)
- Root Locus and Matlab ProgrammingDocument6 pagesRoot Locus and Matlab Programmingshaista00550% (2)
- Lab#11Document4 pagesLab#11Electro OpNo ratings yet
- Ee3100 3Document2 pagesEe3100 3Charandeep TirkeyNo ratings yet
- FALLSEM2021-22 ECE2004 TH VL2021220101877 Reference Material I 09-09-2021 Smith Chart BasicDocument39 pagesFALLSEM2021-22 ECE2004 TH VL2021220101877 Reference Material I 09-09-2021 Smith Chart BasicTarun GopalanNo ratings yet
- Exp 1 - IED - Lab Group 7Document8 pagesExp 1 - IED - Lab Group 7Kazi ShahadatNo ratings yet
- Geochemistry - Introduction: L. Graham Closs Colorado School of MinesDocument31 pagesGeochemistry - Introduction: L. Graham Closs Colorado School of MinesLarry Vilca PayalichNo ratings yet
- CS Simulation ManualDocument11 pagesCS Simulation ManualpoornimaNo ratings yet
- 21EEL305-ASP-Lab ManualDocument51 pages21EEL305-ASP-Lab ManualShivakumar 2108No ratings yet
- Cs1153 Electron Devices and Circuits LabDocument60 pagesCs1153 Electron Devices and Circuits LabDinesh KumarNo ratings yet
- 2 Root Locus 2023Document48 pages2 Root Locus 2023AnkitNo ratings yet
- Chapter 8 (Lead Compensation)Document54 pagesChapter 8 (Lead Compensation)Nischal MaharjanNo ratings yet
- Sujatha Mam Lab Manual 2Document103 pagesSujatha Mam Lab Manual 2GeethakshayaNo ratings yet
- Mani Mam Lab ManualDocument92 pagesMani Mam Lab ManualGeethakshayaNo ratings yet
- Embedded EHR TelehealthDocument5 pagesEmbedded EHR TelehealthGeethakshayaNo ratings yet
- EC5401 - TLWG - Unit 5Document42 pagesEC5401 - TLWG - Unit 5GeethakshayaNo ratings yet
- DSP Notes 2Document55 pagesDSP Notes 2GeethakshayaNo ratings yet
- Attenuators and EqualisersDocument28 pagesAttenuators and EqualisersGeethakshayaNo ratings yet
- Nta Neet Abhyas MOCK TEST - 2Document45 pagesNta Neet Abhyas MOCK TEST - 2bapiNo ratings yet
- 3UF70111AU002 Datasheet enDocument7 pages3UF70111AU002 Datasheet enNivaldo MeloNo ratings yet
- Mechanism Design Chapter 1 - Fall 2020Document74 pagesMechanism Design Chapter 1 - Fall 2020J THE GAMERNo ratings yet
- Chemistry NotesDocument14 pagesChemistry Notesyasser yousriNo ratings yet
- Current Transformers Data SheetDocument8 pagesCurrent Transformers Data SheetElsonAlfredoEscobarArosNo ratings yet
- Chemical Effect and Electric CurrentDocument3 pagesChemical Effect and Electric CurrentRANJIT KUMAR SHAHNo ratings yet
- Chemical BondingDocument13 pagesChemical BondingSenpai JenjenNo ratings yet
- Why Windom !: The VK2ZOI ApproachDocument33 pagesWhy Windom !: The VK2ZOI ApproachColin ChristieNo ratings yet
- Nexus TGADocument43 pagesNexus TGAmaruf amaludinNo ratings yet
- General Physics 2 Las Quarter 4Document184 pagesGeneral Physics 2 Las Quarter 4Pau AbuenaNo ratings yet
- KSR Publication 28Document7 pagesKSR Publication 28K S RAJESHNo ratings yet
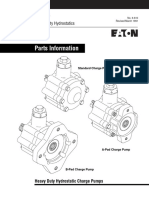
- Bomba Prell - Hevy DutyDocument8 pagesBomba Prell - Hevy DutyAdolfo Lopez HernandoNo ratings yet
- 2 Solar CellSimulation of CZTSSe Thin-Film Solar Cells in COMSOL-2020Document6 pages2 Solar CellSimulation of CZTSSe Thin-Film Solar Cells in COMSOL-2020Nikita SinghNo ratings yet
- Comparison of Friction Factor Equations For Non-Newtonian Fluids in A Pipe FlowDocument28 pagesComparison of Friction Factor Equations For Non-Newtonian Fluids in A Pipe FlowManu K MohanNo ratings yet
- Propagation Analysis of Transverse Defects at The Lower Gage Corner of RailDocument60 pagesPropagation Analysis of Transverse Defects at The Lower Gage Corner of RailBruno PerlesNo ratings yet
- 8024GPS & Accessories: 1.1 General Technical DataDocument9 pages8024GPS & Accessories: 1.1 General Technical DataTan NguyenNo ratings yet
- Konale Neet/Jee Centre: Periodic Table Brain TeaserDocument5 pagesKonale Neet/Jee Centre: Periodic Table Brain TeaserAnushka kambleNo ratings yet
- A Detailed Lesson Pla1Document13 pagesA Detailed Lesson Pla1Etchiny PamandeNo ratings yet
- Lesson 3 - Energy CalculationsDocument10 pagesLesson 3 - Energy CalculationsTalha HossainNo ratings yet
- Vector Algebra Class 12Document10 pagesVector Algebra Class 12Abhayraj SinghNo ratings yet
- HL 80 AhDocument1 pageHL 80 Ahأبو زينب المهندسNo ratings yet
- Quick Guide To Vibration DiagnosticsDocument72 pagesQuick Guide To Vibration DiagnosticsAbderrahim AbarayNo ratings yet
- SGX Series DC Power Supplies: Operation ManualDocument146 pagesSGX Series DC Power Supplies: Operation ManualSeeraphNo ratings yet
- CSB GP1272 - Hoja de DatosDocument1 pageCSB GP1272 - Hoja de DatosGermanYPNo ratings yet
- Forensic Photography PREFINAL TOPICDocument26 pagesForensic Photography PREFINAL TOPICRENRICH C TAYPANo ratings yet
- Waves and Sound: James T. Shipman Jerry D. Wilson Charles A. Higgins, Jr. Omar TorresDocument45 pagesWaves and Sound: James T. Shipman Jerry D. Wilson Charles A. Higgins, Jr. Omar TorresKarylleNo ratings yet
- E2 Electric FieldDocument16 pagesE2 Electric FieldLin YunNo ratings yet
- Guidelines For Nonlinear Analysis of Bridge StructuresDocument4 pagesGuidelines For Nonlinear Analysis of Bridge StructuresMichael HiiNo ratings yet