You might also like
- Industrial InstrumentationDocument32 pagesIndustrial InstrumentationNhân Phạm ĐìnhNo ratings yet
- Electromechanical Systems and Mechatronics: Signal Conditioning: Lecture 3Document42 pagesElectromechanical Systems and Mechatronics: Signal Conditioning: Lecture 3cleytonmarques1991No ratings yet
- El Ofmld90 en PDFDocument8 pagesEl Ofmld90 en PDFمحمد المسعوديNo ratings yet
- Danaher Encoder HandbookDocument16 pagesDanaher Encoder HandbookatifkhushnoodNo ratings yet
- Vibscanner Training Part 1Document95 pagesVibscanner Training Part 1yerin100% (1)
- UNIT - 2 Sensors & TransducersDocument84 pagesUNIT - 2 Sensors & TransducersishaanmittalcollegeNo ratings yet
- Sensors 123Document112 pagesSensors 123Mahmoud HassanNo ratings yet
- Robotics Unit-5Document64 pagesRobotics Unit-5S19IT1215 HarshithaNo ratings yet
- Electronic Instrumentation and MeasurementsDocument29 pagesElectronic Instrumentation and MeasurementsaducbkfetNo ratings yet
- For More Visit WWW - Ktunotes.in: Sensor TechnologyDocument21 pagesFor More Visit WWW - Ktunotes.in: Sensor TechnologyVISHAL MUKUNDANNo ratings yet
- Chapter 3 - Transducer and Sensors Part 1Document46 pagesChapter 3 - Transducer and Sensors Part 1Zersh Ethio100% (1)
- Chapter 3 - Transducer and Sensors Part 1Document46 pagesChapter 3 - Transducer and Sensors Part 1Zersh EthioNo ratings yet
- SensorDocument100 pagesSensorZaki nouiNo ratings yet
- Types of Transducers and Their Applications: Instrumentation and Product TestingDocument31 pagesTypes of Transducers and Their Applications: Instrumentation and Product TestingFemi PrinceNo ratings yet
- Electromechanical Systems and Mechatronics: Signal Conditioning: Lecture 3Document42 pagesElectromechanical Systems and Mechatronics: Signal Conditioning: Lecture 3jricardo019763535No ratings yet
- Sensors and TransducersDocument118 pagesSensors and TransducersDhaval PatelNo ratings yet
- Transducers: Transducer ElementsDocument14 pagesTransducers: Transducer ElementsSourav SwastikNo ratings yet
- Sensors and TransducersDocument118 pagesSensors and TransducersAhmad HamoudaNo ratings yet
- DAQ Lec3Document30 pagesDAQ Lec3AbdelRahman MahmoudNo ratings yet
- Sensors: Sensor and TransducerDocument25 pagesSensors: Sensor and TransducerIrfan MahyunisNo ratings yet
- Digital SignalsDocument45 pagesDigital SignalsDotNo ratings yet
- Types of Transducers and Their Applications: Instrumentation and Product TestingDocument31 pagesTypes of Transducers and Their Applications: Instrumentation and Product TestingvikasinmumbaiNo ratings yet
- Sensors and TransducersDocument35 pagesSensors and TransducersAniket100% (1)
- Types of Transducer and ApplicationDocument31 pagesTypes of Transducer and ApplicationcocojithuNo ratings yet
- Transeducer Lab Part 1Document41 pagesTranseducer Lab Part 1Yasser IsteitiehNo ratings yet
- Intro 32Document252 pagesIntro 32ANTONo ratings yet
- High Speed Sensor, Detection and Its Schematic DiagramDocument18 pagesHigh Speed Sensor, Detection and Its Schematic DiagramjackNo ratings yet
- Mechanical Measurements and InstrumentationDocument71 pagesMechanical Measurements and InstrumentationanandakumarmtsNo ratings yet
- Analog DigitalDocument78 pagesAnalog DigitalAnindya BiswasNo ratings yet
- Transducer Basics ModifiedDocument78 pagesTransducer Basics ModifiedAmit RegeNo ratings yet
- Unit 5 Digital MetersDocument9 pagesUnit 5 Digital Metersazhar3303No ratings yet
- Motion Control Feedback DeviceDocument20 pagesMotion Control Feedback DeviceZyzerull SaadNo ratings yet
- Sensors and ActuatorsDocument32 pagesSensors and ActuatorsSuci KadarsihNo ratings yet
- 3 - Sensor and ActuatorsDocument31 pages3 - Sensor and Actuatorsmehulprajapati1661No ratings yet
- Sensor & Iot - Unit 2Document29 pagesSensor & Iot - Unit 2Biswa RocksNo ratings yet
- Measurement Sensors and InstrumentDocument60 pagesMeasurement Sensors and InstrumentKarthik MathavenNo ratings yet
- 7CS4 IOT Unit-2Document141 pages7CS4 IOT Unit-2Nikhil KumarNo ratings yet
- IE 3371:automatic Control Systems: Chapter 2:sensors and TransducersDocument54 pagesIE 3371:automatic Control Systems: Chapter 2:sensors and Transducersفيصل aNo ratings yet
- Pragati Engineering College (Autonomous) Mini Project ReviewDocument9 pagesPragati Engineering College (Autonomous) Mini Project ReviewmukeshNo ratings yet
- Sensors and Actuators 1Document37 pagesSensors and Actuators 1Ansh PanchalNo ratings yet
- Transduser Projects Call 09952749533Document42 pagesTransduser Projects Call 09952749533setsindia3735No ratings yet
- Chapter Three PDFDocument44 pagesChapter Three PDFHassan AliNo ratings yet
- Unit Iii Sensors and Machine Vision: Prepared by B.Balasubramanian Ap/Mech CcetDocument66 pagesUnit Iii Sensors and Machine Vision: Prepared by B.Balasubramanian Ap/Mech CcetBala mechNo ratings yet
- Sensors AND Machine VisionDocument78 pagesSensors AND Machine VisionbabuNo ratings yet
- OIE 751 ROBOTICS Unit 3 Class 1 (11-9-2020)Document13 pagesOIE 751 ROBOTICS Unit 3 Class 1 (11-9-2020)MICHEL RAJNo ratings yet
- Oa1-Two MarksDocument28 pagesOa1-Two MarksMEIVELJ 19EE025No ratings yet
- Digital InstrumentsDocument65 pagesDigital InstrumentsPramod PathadeNo ratings yet
- Sensors and Transducers UNIT-IIDocument84 pagesSensors and Transducers UNIT-IITamilnesan PNo ratings yet
- MSD Module 2Document98 pagesMSD Module 2arvind valentinoNo ratings yet
- LVDT WhitePaperDocument3 pagesLVDT WhitePaperdetrutamiNo ratings yet
- Chapter 4: Scaling: A. Definition of Key TermsDocument8 pagesChapter 4: Scaling: A. Definition of Key TermsKevin MuhalingNo ratings yet
- Sensors Dan ActuatorDocument21 pagesSensors Dan ActuatorMarsius SihombingNo ratings yet
- Unit 4Document45 pagesUnit 4apakkiNo ratings yet
- Digital MultimeterDocument13 pagesDigital MultimeterANAKHNo ratings yet
- Data Acquisition: Reference Book Jovitha Jerome, "Virtual Instrumentation and LABVIEW", PHI LearningDocument40 pagesData Acquisition: Reference Book Jovitha Jerome, "Virtual Instrumentation and LABVIEW", PHI LearningpankajNo ratings yet
- Vibration and Monitoring Terms GlossaryDocument12 pagesVibration and Monitoring Terms Glossaryyaniprasetyo12No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Geography Worksheet 1 Rural SettlementsDocument14 pagesGeography Worksheet 1 Rural SettlementsLelethuNo ratings yet
- (IMP) Ancient Indian JurisprudenceDocument28 pages(IMP) Ancient Indian JurisprudenceSuraj AgarwalNo ratings yet
- YR7 Revision Sheet - Working ScietificallyDocument6 pagesYR7 Revision Sheet - Working ScietificallyNisha zehra100% (1)
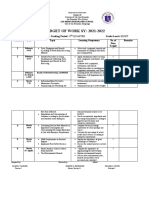
- BUDGET OF WORK SY: 2021-2022: Subject: Tle 8 Grading Period: 3Document2 pagesBUDGET OF WORK SY: 2021-2022: Subject: Tle 8 Grading Period: 3michelle dayritNo ratings yet
- Appendix A: Sample Plan A Vacation TableDocument3 pagesAppendix A: Sample Plan A Vacation TableChristian Xander LaureteNo ratings yet
- Frequency Distribution NewDocument18 pagesFrequency Distribution NewRishab Jain 2027203No ratings yet
- Afa 7&8Document11 pagesAfa 7&8APMNo ratings yet
- Free Downloads: Type Matters!Document3 pagesFree Downloads: Type Matters!Shinko Art Studio9% (11)
- Week 4 and 5 Non-Verbal Communication: 4.1 The Importance of Nonverbal CommunicationDocument8 pagesWeek 4 and 5 Non-Verbal Communication: 4.1 The Importance of Nonverbal CommunicationNovilia FriskaNo ratings yet
- Franz Wagner & Sohn GMBH: U-Tube Manometer D 116 FDocument1 pageFranz Wagner & Sohn GMBH: U-Tube Manometer D 116 Fdickliu dickliuNo ratings yet
- Genomic and CDNA LibrariesDocument15 pagesGenomic and CDNA LibrariesPrabhleen KaurNo ratings yet
- ITEM ANALYSIS - MATH 9 EmeraldDocument5 pagesITEM ANALYSIS - MATH 9 EmeraldLiz Rabaya IntiaNo ratings yet
- Test - Reading Explorer 3 8A - QuizletDocument4 pagesTest - Reading Explorer 3 8A - QuizletTatjana Modea SibulNo ratings yet
- Saidin PSC - SHO UTMSPACE - 13.01.22 Module Slide 6s - LDocument43 pagesSaidin PSC - SHO UTMSPACE - 13.01.22 Module Slide 6s - LAmer IkhwanNo ratings yet
- Engineering Thought Intelligence Fictional Intellectual Behave Exercise 1 ComputationDocument4 pagesEngineering Thought Intelligence Fictional Intellectual Behave Exercise 1 Computationposgas aceNo ratings yet
- The 4 Hour Work SummaryDocument6 pagesThe 4 Hour Work SummaryhgfhgNo ratings yet
- h1 Styleclearboth Idcontentsection0the Only Guide To Commercial Fisheries Reviewh1jbfch PDFDocument14 pagesh1 Styleclearboth Idcontentsection0the Only Guide To Commercial Fisheries Reviewh1jbfch PDFgalleymark22No ratings yet
- BSP 6000 Pres 1Document8 pagesBSP 6000 Pres 1PriyanNo ratings yet
- Astm D 2979 PDFDocument3 pagesAstm D 2979 PDFMiftahulArifNo ratings yet
- HG - Grade 12 - Module 3 - October 14Document19 pagesHG - Grade 12 - Module 3 - October 14RhasmineKyle BeltranNo ratings yet
- Lesson From Seveso ItalyDocument48 pagesLesson From Seveso ItalyBilal ZamanNo ratings yet
- Accion Didactica 1st Grade NovemberDocument3 pagesAccion Didactica 1st Grade NovemberAntonio Abad GutiérrezNo ratings yet
- Class-5 Unit-5 (Prose) Shabale (Sabala)Document16 pagesClass-5 Unit-5 (Prose) Shabale (Sabala)GKHPS B HOSAHALLINo ratings yet
- Compare and ContrastDocument9 pagesCompare and Contrastmai mohamedNo ratings yet
- Soil PHDocument19 pagesSoil PHElly Paul Andres TomasNo ratings yet
- Grade Thresholds - November 2018: Cambridge International AS & A Level Mathematics (9709)Document3 pagesGrade Thresholds - November 2018: Cambridge International AS & A Level Mathematics (9709)redwanNo ratings yet
- Email Etiquettes: Click To Add TextDocument25 pagesEmail Etiquettes: Click To Add Textmanveen kaurNo ratings yet
- Tentative Schedule For Mid Odd Semester Exam 2023-24Document7 pagesTentative Schedule For Mid Odd Semester Exam 2023-24gimtce GIMTCE2022No ratings yet
- FS 2 - Learning Episode 4-7Document3 pagesFS 2 - Learning Episode 4-7dave puertollanoNo ratings yet
- SM2 Polygon of ForcesDocument11 pagesSM2 Polygon of ForcesMel DNo ratings yet