You might also like
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Verilog HDL - Text BookDocument158 pagesVerilog HDL - Text BookLalith KrishnanNo ratings yet
- Functional Verification 2003: Technology, Tools and MethodologyDocument5 pagesFunctional Verification 2003: Technology, Tools and MethodologydoomachaleyNo ratings yet
- Sols Book PDFDocument120 pagesSols Book PDFtt_aljobory3911100% (1)
- MCQ Vlsi 1Document30 pagesMCQ Vlsi 1vmspraneeth100% (1)
- FPGA Interview Questions, FPGA Interview Questions & Answers, FPGADocument9 pagesFPGA Interview Questions, FPGA Interview Questions & Answers, FPGArajeshpandaNo ratings yet
- Digital VLSI Design Lecture 3: Logic Synthesis: Semester A, 2018-19 Lecturer: Dr. Adam TemanDocument47 pagesDigital VLSI Design Lecture 3: Logic Synthesis: Semester A, 2018-19 Lecturer: Dr. Adam TemansrajeceNo ratings yet
- DFT (Design For Testability)Document21 pagesDFT (Design For Testability)lavanyaNo ratings yet
- VHDL 4 RTL ModelsDocument33 pagesVHDL 4 RTL ModelsNguyễn Minh NghĩaNo ratings yet
- Solutions To Exercises On Processes SynchronizationDocument5 pagesSolutions To Exercises On Processes SynchronizationLộc Sẹo100% (1)
- Ee1D21: Digital Systems B: Bsc. Ee, 1 Year, 2020-2021, 2 VHDL LectureDocument40 pagesEe1D21: Digital Systems B: Bsc. Ee, 1 Year, 2020-2021, 2 VHDL LecturelimeiNo ratings yet
- VHDL Tutorial: Nand GatesDocument11 pagesVHDL Tutorial: Nand GatessikopikoNo ratings yet
- Ee463 6Document38 pagesEe463 6ahmed alzbidiNo ratings yet
- Scripts, Flow Control, and Data Structures: Programming With MatlabDocument32 pagesScripts, Flow Control, and Data Structures: Programming With MatlabNurullah MertelNo ratings yet
- 5) Sequential - StatementDocument85 pages5) Sequential - Statementfaxofi9132No ratings yet
- Islamic University of Technology: EEE 4483 Digital Electronics & Pulse TechniquesDocument14 pagesIslamic University of Technology: EEE 4483 Digital Electronics & Pulse TechniquesMUHAMMAD JAWAD CHOWDHURY, 180041228No ratings yet
- Lab 3 SIGNAL TRANSFORMATION UsmanDocument16 pagesLab 3 SIGNAL TRANSFORMATION UsmanUsman jadoonNo ratings yet
- Introduction To Processes: Dr. Yann-Hang Lee GWC 224 Yhlee@asu - EduDocument19 pagesIntroduction To Processes: Dr. Yann-Hang Lee GWC 224 Yhlee@asu - EduChutiyaNo ratings yet
- Multiprogramming: Concurrency Improves ThroughputDocument38 pagesMultiprogramming: Concurrency Improves ThroughputFiroj AnsariNo ratings yet
- CSE101 - Lec 5 PART 1 (Operators)Document29 pagesCSE101 - Lec 5 PART 1 (Operators)Pawan KumarNo ratings yet
- MIT6 004s09 Tutor20 Sol PDFDocument15 pagesMIT6 004s09 Tutor20 Sol PDFCHANDRA MOULI MARTHYNo ratings yet
- Verilog Interview Questions 1670709109Document21 pagesVerilog Interview Questions 1670709109Ali MuhammadNo ratings yet
- Formation VHDL FPGA Cours 1Document79 pagesFormation VHDL FPGA Cours 1LAUNo ratings yet
- 7 Control StructureDocument11 pages7 Control StructurePawas GoyalNo ratings yet
- Summary of Synthesisable Verilog 2001: Numbers and Constants AssignmentDocument2 pagesSummary of Synthesisable Verilog 2001: Numbers and Constants AssignmentAZEENNo ratings yet
- Assignment 1-1Document2 pagesAssignment 1-1Abhroneel MoitraNo ratings yet
- 3 Encryption Error CheckingDocument25 pages3 Encryption Error CheckingAnubha YadavNo ratings yet
- VHDL Basics: TIE-50206 Logic Synthesis Arto Perttula Tampere University of Technology Fall 2017Document46 pagesVHDL Basics: TIE-50206 Logic Synthesis Arto Perttula Tampere University of Technology Fall 2017antoniocljNo ratings yet
- Interview Questions & Answers: Ans: 101 ASCII Value of "A" Is 1000001, Which When Converted Into Octal Gives 101Document16 pagesInterview Questions & Answers: Ans: 101 ASCII Value of "A" Is 1000001, Which When Converted Into Octal Gives 101Shakeel ScetNo ratings yet
- Synthesis HintsDocument44 pagesSynthesis HintsPrathamesh GangalNo ratings yet
- Chapter 4Document43 pagesChapter 4Kiran GunasegaranNo ratings yet
- Name: Wisal Muhammad Department: Electrical CommunicationDocument27 pagesName: Wisal Muhammad Department: Electrical CommunicationZiYAD AhmadNo ratings yet
- Digital Signal Processing Lab ManualDocument12 pagesDigital Signal Processing Lab Manualali khanNo ratings yet
- Signals and VariablesDocument20 pagesSignals and Variablesdjogi lubisNo ratings yet
- Verilog AssignmentsDocument27 pagesVerilog Assignmentssrikar_dattaNo ratings yet
- Full Adder VHDLDocument52 pagesFull Adder VHDLTushar JainNo ratings yet
- VHDL 1 AniruddhaDocument29 pagesVHDL 1 AniruddhaHussein A. AlsameeNo ratings yet
- D-Type Latch IIDocument19 pagesD-Type Latch IIjames-lawsonNo ratings yet
- Verilog Tutorial - Two Phase Clocking Guide: Lukasz StrozekDocument6 pagesVerilog Tutorial - Two Phase Clocking Guide: Lukasz StrozekMilen MilenovNo ratings yet
- Multiplication of Signed Numbers: CSE 430 - Assignment 3Document15 pagesMultiplication of Signed Numbers: CSE 430 - Assignment 3alam sifatNo ratings yet
- Práctica 3 VHDLDocument31 pagesPráctica 3 VHDLmoises garciaNo ratings yet
- Cse L5 (Operators)Document45 pagesCse L5 (Operators)abhiNo ratings yet
- VerilogDocument61 pagesVerilogAnonymous 13LTklH9myNo ratings yet
- Lab Sheet2Document3 pagesLab Sheet2Amrit SapkotaNo ratings yet
- IUGLab12 PDFDocument7 pagesIUGLab12 PDFarabsamaNo ratings yet
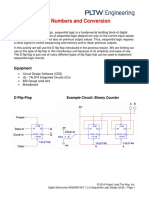
- 1.2.4.AK SequentialLogicDesign - Counters - DLBDocument7 pages1.2.4.AK SequentialLogicDesign - Counters - DLBSean MonahanNo ratings yet
- Write The VHDL Code That Describe: Bit CountDocument31 pagesWrite The VHDL Code That Describe: Bit CountMad Hatter MercuryNo ratings yet
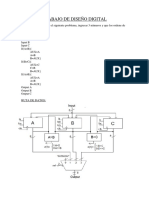
- Trabajo de Diseño02Document10 pagesTrabajo de Diseño02Alvaro SegoviaNo ratings yet
- Trabajo de Diseño02Document10 pagesTrabajo de Diseño02Victor yurivilca lazoNo ratings yet
- Group No.12 CS21103 - B - Peterson's Solution and SemaphoreDocument12 pagesGroup No.12 CS21103 - B - Peterson's Solution and SemaphoreSubhojit BhadraNo ratings yet
- Lecture 5 Unit Testing Part 2Document35 pagesLecture 5 Unit Testing Part 2Santosh PantaNo ratings yet
- 1st - Yr - Lecture 07 - NEWDocument38 pages1st - Yr - Lecture 07 - NEWShaunNo ratings yet
- Daa All 4 Units Question Bank Answer KeyDocument41 pagesDaa All 4 Units Question Bank Answer KeySanthosh KannekantiNo ratings yet
- Array Attributes: Type ROM Is Array (0 To 15, 7 Downto 0) of Bit Signal ROM1: ROMDocument14 pagesArray Attributes: Type ROM Is Array (0 To 15, 7 Downto 0) of Bit Signal ROM1: ROMreach_arunpai4249No ratings yet
- Lab # 11: This Lab Has Been Designed To Familiarize With The Design of A Keypad Scanner Using VHDL and Show The Output On The FPGA BoardDocument4 pagesLab # 11: This Lab Has Been Designed To Familiarize With The Design of A Keypad Scanner Using VHDL and Show The Output On The FPGA Boardshermeen445No ratings yet
- 3 Dataflow-ModellingDocument10 pages3 Dataflow-ModellingHimanshu MeenaNo ratings yet
- Pascal Programming ShortnoteDocument2 pagesPascal Programming Shortnoteictprasanna silvaNo ratings yet
- ECE 742 - Digital System-on-Chip Design: Lab ReportDocument18 pagesECE 742 - Digital System-on-Chip Design: Lab ReportAishwarya JSNo ratings yet
- Unit I HDL Design PDFDocument84 pagesUnit I HDL Design PDFVinod JagdaleNo ratings yet
- MS For Exam Q - S OnDocument45 pagesMS For Exam Q - S OnThe Twin WolvesNo ratings yet
- Structure Programming ApproachDocument23 pagesStructure Programming ApproachjayeshNo ratings yet
- ComparatorsDocument11 pagesComparatorsBharathi MuniNo ratings yet
- Control Exp 8 Student ManualDocument7 pagesControl Exp 8 Student ManualSyed Nahid Ahmed TopuNo ratings yet
- College of Engineering and Computing: Assignment 2Document2 pagesCollege of Engineering and Computing: Assignment 2مشاهير celebritiesNo ratings yet
- Class Test SasindharDocument9 pagesClass Test Sasindharsiddardtha666666No ratings yet
- Sensors 22 00554 v2Document12 pagesSensors 22 00554 v2hung kungNo ratings yet
- Atmospheric Influences On Satellite CommunicationsDocument5 pagesAtmospheric Influences On Satellite Communicationshung kungNo ratings yet
- Carrier Frequency OffsetDocument2 pagesCarrier Frequency Offsethung kungNo ratings yet
- Xiao 2018Document11 pagesXiao 2018hung kungNo ratings yet
- Note 1Document25 pagesNote 1hung kungNo ratings yet
- PIERS2013 Taipei Proceedings 04Document314 pagesPIERS2013 Taipei Proceedings 04hung kungNo ratings yet
- A Ka-Band Receiver Front-End With Noise InjectionDocument15 pagesA Ka-Band Receiver Front-End With Noise Injectionhung kungNo ratings yet
- W HKT Yly EHgyk DM VNDocument6 pagesW HKT Yly EHgyk DM VNhung kungNo ratings yet
- 409 New Lab 2 CorrDocument9 pages409 New Lab 2 Corrhung kungNo ratings yet
- ELECH409 Th04Document51 pagesELECH409 Th04hung kungNo ratings yet
- CSD 2023Document34 pagesCSD 2023hung kungNo ratings yet
- Session 3Document10 pagesSession 3hung kungNo ratings yet
- Report - Sergi GallardoDocument74 pagesReport - Sergi Gallardohung kungNo ratings yet
- Installation GNS3Document6 pagesInstallation GNS3hung kungNo ratings yet
- Lab VPNDocument9 pagesLab VPNhung kungNo ratings yet
- Design of Polyrod Antenna Having Iso Ux Radiation Characteristic For Satellite Communication SystemsDocument8 pagesDesign of Polyrod Antenna Having Iso Ux Radiation Characteristic For Satellite Communication Systemshung kungNo ratings yet
- Xilinx Vivado Webpack Download and Installation Tool Guide For EECS31L Fall 2016Document8 pagesXilinx Vivado Webpack Download and Installation Tool Guide For EECS31L Fall 2016reach.tarunp9510No ratings yet
- 11.1 Introduction To Combinational Logic SynthesisDocument17 pages11.1 Introduction To Combinational Logic SynthesisAgnus S Swarna LakshmiNo ratings yet
- Subject Discription BooksDocument10 pagesSubject Discription BooksVipul AroraNo ratings yet
- 1st Lecture DLDDocument13 pages1st Lecture DLDsibgha ziaNo ratings yet
- Introductory Chapter ASIC Technologies and DesignDocument11 pagesIntroductory Chapter ASIC Technologies and DesignDeev DeevNo ratings yet
- Digital Design: Sequential Logic Design - ControllersDocument58 pagesDigital Design: Sequential Logic Design - ControllersAhmad AliNo ratings yet
- Lab2 InstructionsDocument19 pagesLab2 InstructionsMeta KnightNo ratings yet
- RTL Simulation Lab ManualDocument78 pagesRTL Simulation Lab Manualswapna revuri100% (2)
- What Is Physical Synthesis?: Zhuo Li and Charles J. Alpert, IBMDocument3 pagesWhat Is Physical Synthesis?: Zhuo Li and Charles J. Alpert, IBMRamakrishnaRao SoogooriNo ratings yet
- FRCD Lab Activity Manual - V7 00-2Document87 pagesFRCD Lab Activity Manual - V7 00-2Chance DanielNo ratings yet
- Chapter1: Introduction To VerilogDocument15 pagesChapter1: Introduction To Verilogarunguptha_gsNo ratings yet
- Class 15Document54 pagesClass 15Santhi SriNo ratings yet
- IT FundamentalsDocument6 pagesIT FundamentalsjamesfermanejoNo ratings yet
- What Are The Required Subjects To Learn To Become A VLSI Digital IC Engineer - QuoraDocument2 pagesWhat Are The Required Subjects To Learn To Become A VLSI Digital IC Engineer - Quoramahamd saiedNo ratings yet
- IE1204 Digital Design F11: Programmable Logic, VHDL For Sequential CircuitsDocument68 pagesIE1204 Digital Design F11: Programmable Logic, VHDL For Sequential CircuitsAhmad AliNo ratings yet
- Resume Hongling YeDocument1 pageResume Hongling Yeyehongling12No ratings yet
- Challenges of VHDL X-Propagation SimulationsDocument8 pagesChallenges of VHDL X-Propagation Simulationspinakin4uNo ratings yet
- SynthesisDocument10 pagesSynthesisprashanthNo ratings yet
- Azuro Ccopt White PaperDocument20 pagesAzuro Ccopt White PaperAshok ChowdaryNo ratings yet
- Advanced VLSIDocument9 pagesAdvanced VLSIDushyant devatwalNo ratings yet
- Fundamentals of Digital Logic With VHDL Design 4Th Edition Brown Full ChapterDocument67 pagesFundamentals of Digital Logic With VHDL Design 4Th Edition Brown Full Chapteroscar.draper548100% (8)
- VLSI Crash Course Synthesis - 2019Document77 pagesVLSI Crash Course Synthesis - 2019Armagan ErgunNo ratings yet
- Blind Adaptive Equalization For QAM Signals: New Algorithms and FPGA ImplementationDocument126 pagesBlind Adaptive Equalization For QAM Signals: New Algorithms and FPGA ImplementationJelkica Svetic BanovicNo ratings yet
- Syllabus For Applied ElectronicsDocument28 pagesSyllabus For Applied ElectronicsvinayakbondNo ratings yet