You might also like
- AutoExternal - PLC Logic IdeaDocument2 pagesAutoExternal - PLC Logic IdeaDave FansolatoNo ratings yet
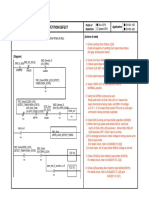
- Door Open Lock Repetition Defect: Run CPU Speed CPU DI120 150 DI180 420Document1 pageDoor Open Lock Repetition Defect: Run CPU Speed CPU DI120 150 DI180 420Ace Noah SomintacNo ratings yet
- Operation Cpu Fault Error: Point of Detection ApplicationDocument1 pageOperation Cpu Fault Error: Point of Detection ApplicationNoahNo ratings yet
- TCD 001 PDFDocument1 pageTCD 001 PDFQuang Pham DuyNo ratings yet
- Door Open Lock: (Please, Check S/W SEQUENCE)Document1 pageDoor Open Lock: (Please, Check S/W SEQUENCE)Daniel GatdulaNo ratings yet
- Delta (AutoCon)Document49 pagesDelta (AutoCon)Junaid AhmedNo ratings yet
- Sepam Series 10 - Proteccion 50-51Document21 pagesSepam Series 10 - Proteccion 50-51josue perezNo ratings yet
- Drok Delay Power Off RelayDocument1 pageDrok Delay Power Off RelayseascootNo ratings yet
- KN1236 Cage Welding Machine DatasheetDocument116 pagesKN1236 Cage Welding Machine DatasheetDaniel Ruiz100% (1)
- Di1 (Si210) Elevator /: Trouble ShootingDocument7 pagesDi1 (Si210) Elevator /: Trouble Shootingkolwin .chindwinNo ratings yet
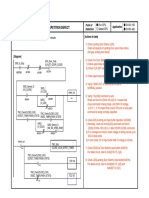
- Door Close Lock Repetition Defect: Run CPU Speed CPU DI120 150 DI180 420Document1 pageDoor Close Lock Repetition Defect: Run CPU Speed CPU DI120 150 DI180 420Daniel GatdulaNo ratings yet
- Watchdog Temporizador U5021MDocument9 pagesWatchdog Temporizador U5021MJorge Martinez PerezNo ratings yet
- Door Close Lock Defect: Meaning)Document1 pageDoor Close Lock Defect: Meaning)Ace Noah SomintacNo ratings yet
- 9 Cuadro de Flujo de La Funcion de Control RCS - PV351Document24 pages9 Cuadro de Flujo de La Funcion de Control RCS - PV351MarcoNo ratings yet
- LT-100 Development Document Version - V0.5 - 20160803Document17 pagesLT-100 Development Document Version - V0.5 - 20160803Frans FrederikksonNo ratings yet
- Takisawa Manual 3 of 12Document101 pagesTakisawa Manual 3 of 12Muhammad Ziyan RizqinNo ratings yet
- USER MANUAL THC3T-04 - v103 - A4Document17 pagesUSER MANUAL THC3T-04 - v103 - A4JoelNo ratings yet
- Embedded Real TimeDocument60 pagesEmbedded Real Timepraveen_kodgirwarNo ratings yet
- Testing Directional Overcurrent Protection: Test UniverseDocument23 pagesTesting Directional Overcurrent Protection: Test Universeyand_carlosNo ratings yet
- Kc-H200-Manual-Eng 180424Document17 pagesKc-H200-Manual-Eng 180424trinh nguyenNo ratings yet
- 11 - Solon TCD171-188Document8 pages11 - Solon TCD171-188Fabian VirgiliNo ratings yet
- SAM4020 Quiet Solenoid ModeDocument2 pagesSAM4020 Quiet Solenoid ModeMatiasNo ratings yet
- LR9 7Dppppp: Current Transformer OperatedDocument2 pagesLR9 7Dppppp: Current Transformer OperatedandreNo ratings yet
- IA2 - Scheme & Sol MC - by TauseefDocument6 pagesIA2 - Scheme & Sol MC - by Tauseefjvgirish74No ratings yet
- Alarms Manual ENGLISH PDFDocument12 pagesAlarms Manual ENGLISH PDFSictir IonutNo ratings yet
- Solucion de Problemas Sigma Solon LD 2Document4 pagesSolucion de Problemas Sigma Solon LD 2Jesus ChecaNo ratings yet
- Omicron Overcurrent ExampleDocument22 pagesOmicron Overcurrent ExampleZokiNo ratings yet
- Simocode TermsDocument2 pagesSimocode Termsshailesh284No ratings yet
- TemperatureControllerAI208v78 191003Document2 pagesTemperatureControllerAI208v78 191003gvvprasadvktNo ratings yet
- 1333 mpr500 ManDocument7 pages1333 mpr500 ManTan VuNo ratings yet
- Customize Parameters: 1. Customizing Function With TechstreamDocument2 pagesCustomize Parameters: 1. Customizing Function With TechstreamVu LeNo ratings yet
- Trolley Sizer Shutdown ConfigurationDocument4 pagesTrolley Sizer Shutdown ConfigurationMatiasNo ratings yet
- Simocode TermsDocument2 pagesSimocode TermsArunava BasakNo ratings yet
- AN147 CMT2300AW Features Usage Guideline-En-V1.1-20201027Document9 pagesAN147 CMT2300AW Features Usage Guideline-En-V1.1-20201027Erick AndradeNo ratings yet
- Web p05627 Manual Facility 4t Hibrida Unificado Rev2Document2 pagesWeb p05627 Manual Facility 4t Hibrida Unificado Rev2Marcio JuliaszNo ratings yet
- Dupla 5T Board: Technical ManualDocument14 pagesDupla 5T Board: Technical ManualChristian BorrmannNo ratings yet
- Intelilite: New Features ListDocument10 pagesIntelilite: New Features ListHernan RiveraNo ratings yet
- Intelilite: New Features ListDocument10 pagesIntelilite: New Features ListHernan RiveraNo ratings yet
- IL NT STD 2 3 0 - NFL - r1Document10 pagesIL NT STD 2 3 0 - NFL - r1Aung MhNo ratings yet
- Logix Designer Report(s) 10Document2 pagesLogix Designer Report(s) 10JOSE JIMENEZNo ratings yet
- Cde Hmi ManualDocument20 pagesCde Hmi ManualJit SarkarNo ratings yet
- TCD ListDocument14 pagesTCD ListtechnicalofficerNo ratings yet
- Interrupt ProgrammingDocument20 pagesInterrupt ProgrammingpratikgohelNo ratings yet
- Sensors - Automatic Bulk FillingDocument6 pagesSensors - Automatic Bulk FillingMatiasNo ratings yet
- 10050-Sharing EDT Clock With Scan ClockDocument10 pages10050-Sharing EDT Clock With Scan ClockRathnambiga UnnikrishnanNo ratings yet
- 08 - Solon Standard-TS-03-0 - 070514 - TCD122-135Document12 pages08 - Solon Standard-TS-03-0 - 070514 - TCD122-135gunawanNo ratings yet
- 0 07 D 0071 D5-Evo D10 Synchronisation Diagram 01032016 AP WEBDocument2 pages0 07 D 0071 D5-Evo D10 Synchronisation Diagram 01032016 AP WEBmendesgil4No ratings yet
- IMS MD20 ES English ManualDocument21 pagesIMS MD20 ES English ManualinfoNo ratings yet
- 3RW52 Quick Start GuideDocument2 pages3RW52 Quick Start Guideubaid_45No ratings yet
- ToshibaS2E21ProductManual130719 1355935871Document12 pagesToshibaS2E21ProductManual130719 1355935871wher200202No ratings yet
- Altivar 71 - Pierd - 3f - MotDocument1 pageAltivar 71 - Pierd - 3f - Motapirvan63No ratings yet
- Mm10 ManualDocument9 pagesMm10 ManualpandurangaNo ratings yet
- 09 - Solon Standard-TS-03-0 - 070514 - TCD140-147Document4 pages09 - Solon Standard-TS-03-0 - 070514 - TCD140-147gunawanNo ratings yet
- Install GuideDocument12 pagesInstall Guidekaleem100% (13)
- Running Direction Error: Prev - Enco - Old-Prev - Enco Make - On - Off - History (x11pl, On)Document1 pageRunning Direction Error: Prev - Enco - Old-Prev - Enco Make - On - Off - History (x11pl, On)Angel GabrielNo ratings yet
- HI 3593 ARINC 429 3.3V Dual Receiver, Single Transmitter With SPI Application Note AN 161Document18 pagesHI 3593 ARINC 429 3.3V Dual Receiver, Single Transmitter With SPI Application Note AN 161Abbas HassanpourNo ratings yet
- ExternalInterrupt PPTDocument28 pagesExternalInterrupt PPTsharadaNo ratings yet
- Marine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersFrom EverandMarine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersRating: 5 out of 5 stars5/5 (2)
- Organization TheoryDocument131 pagesOrganization TheoryElii ManNo ratings yet
- An Inflection Point For The Data-Driven Enterprise: Pulse SurveyDocument20 pagesAn Inflection Point For The Data-Driven Enterprise: Pulse SurveyAndy BaneNo ratings yet
- Firmware Update of Protection and Control Relays DescriptionDocument3 pagesFirmware Update of Protection and Control Relays DescriptionHutch WoNo ratings yet
- Utilities User Guide: Caefatigue Software (CF)Document38 pagesUtilities User Guide: Caefatigue Software (CF)Oliver RailaNo ratings yet
- Pvi 7200 Wind Interface 0Document20 pagesPvi 7200 Wind Interface 0KarbonKaleNo ratings yet
- Psychology of Color2Document33 pagesPsychology of Color2abdikani abdilaahiNo ratings yet
- Cryptocurrency System Using Body Activity Data Wo2020060606 2 of 6Document1 pageCryptocurrency System Using Body Activity Data Wo2020060606 2 of 6Nemo NemoNo ratings yet
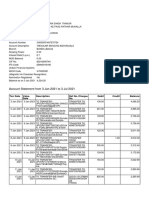
- Account Statement From 3 Jan 2021 To 3 Jul 2021: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocument8 pagesAccount Statement From 3 Jan 2021 To 3 Jul 2021: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceSanatan ThakurNo ratings yet
- Atc Investor Relations U.S. Technology and 5g Update q4 2020Document35 pagesAtc Investor Relations U.S. Technology and 5g Update q4 2020Valtteri ItärantaNo ratings yet
- Oracle Audit Vault and Database FirewallDocument16 pagesOracle Audit Vault and Database FirewallRofiq AhmedNo ratings yet
- Managerial Economics and Strategy: Third EditionDocument30 pagesManagerial Economics and Strategy: Third EditionRaeNo ratings yet
- GE TVSS Specification Data Sheet (TME 65ka - 100ka - Wall Monut)Document3 pagesGE TVSS Specification Data Sheet (TME 65ka - 100ka - Wall Monut)Angela TienNo ratings yet
- Marketing Manager: at Aztec GroupDocument2 pagesMarketing Manager: at Aztec GroupAgnish GhatakNo ratings yet
- Discrete Mathematics - Propositional LogicDocument8 pagesDiscrete Mathematics - Propositional LogicAldrich PanioNo ratings yet
- Ps10ex Pressure Switch PresostatoDocument1 pagePs10ex Pressure Switch PresostatoJULIO AREVALONo ratings yet
- Computer DealersDocument43 pagesComputer DealersZafar Mirza100% (1)
- Fuel Temperature SensorDocument12 pagesFuel Temperature SensorAakarsh Verma100% (2)
- SBxx-1SP-US-40-IA-xx-16 Instruct ManDocument224 pagesSBxx-1SP-US-40-IA-xx-16 Instruct ManSmellyDog360No ratings yet
- 1 Correlation Between Na2SiO3 NaOH Ratio ADocument6 pages1 Correlation Between Na2SiO3 NaOH Ratio AedwardcolmeNo ratings yet
- Docket Dominion AlabaDocument3 pagesDocket Dominion AlabaDominionNo ratings yet
- Function: Maintenance & Repair at Operational LevelDocument2 pagesFunction: Maintenance & Repair at Operational LevelSHUSHEELNo ratings yet
- D-Code Presentation - Building ABAP Applications Using Code PushdownDocument71 pagesD-Code Presentation - Building ABAP Applications Using Code PushdownMohit PandyaNo ratings yet
- Avamar-4.1-Technical-Addendum. Avamar Commandspdf PDFDocument537 pagesAvamar-4.1-Technical-Addendum. Avamar Commandspdf PDFdanilaix50% (2)
- BM3 PlusDocument2 pagesBM3 Pluscicik wijayantiNo ratings yet
- Chapter 6 Review Questions MCF3M Winter '22Document4 pagesChapter 6 Review Questions MCF3M Winter '22Natalie StockwellNo ratings yet
- Areva Manual Book p126-p127Document546 pagesAreva Manual Book p126-p127Vijayaganthaan VisvanatthanNo ratings yet
- OSN 8800 6800 3800 V100R010C00 Hardware Description 01 PDFDocument3,972 pagesOSN 8800 6800 3800 V100R010C00 Hardware Description 01 PDFdonekeo100% (1)
- The Holland Code Career Test: Your Career Interest ProfileDocument31 pagesThe Holland Code Career Test: Your Career Interest ProfileLewwandi VithanageNo ratings yet
- OpenTaps in RetailDocument13 pagesOpenTaps in RetailtarunsainaniNo ratings yet
- Lubuklinggau Price 2017Document59 pagesLubuklinggau Price 2017akhmad hidayatNo ratings yet